基于模糊-PID算法的固体氧化物燃料电池发电逆变控制方法研究
2018-11-26魏立明田益名郭秀娟
魏立明 田益名 郭秀娟
(吉林建筑大学 电气与计算机学院,长春 130118)
目前,世界各个国家对船舶环保条约规范进行了严格规范,同时燃料价格的上涨也使得世界各国掀起了环保、经济、高效型舰船的热潮.基于燃料电池电流密度高、经济性相对较好、避免腐蚀等优点,许多国家都把目光聚集在研发燃料电池动力船上[1].与其它可再生能源(例如太阳能发电、风能发电)发电比较,固体氧化物燃料电池具有噪声低、废弃物排放较少,其安放不受地域限制等优势,使得近年来对固体氧化物燃料电池发电系统的研究成为可再生能源发电中研究热点之一[2].本文针对固体氧化物燃料电池发电系统中的逆变系统和控制策略进行分析和研究.
1 固体氧化物燃料电池(SOFC)数学模型分析
由于实际燃料电池的复杂性,与仿真模型有一定的区别,因此,在整个固体氧化物燃料电池模型仿真过程中,对模型进行了一些物理和数学假设[3],其中,本文忽略了电池内不均匀分布的温度和电流密度.
整个固体氧化物燃料电池由多个单体燃料电池组成,因此由其并联形成整个固体氧化物燃料电池,其输出电压如下[4]:
V=N(E-ηohm-ηact-ηcon)
(1)
式中,E为单体燃料电池的Nernst可逆电势;ηohm为单体燃料电池欧姆极化电压;ηact为单体燃料电池活性极化电压;ηcon为模型中单体燃料电池间浓度差产生的相对极化电压.
燃料电池间的开路电压E如下式所示,即:
(2)
其中,R为通用气体常数;F为法拉第常熟;E0=1.258 6-0.000 252T,T为电池的工作温度.
欧姆极化电压:
(3)
式中,I为燃料电池电堆得电流;r0为当温度T=1 273K时燃料电池内部电阻;α为其温度系数.
(4)
式中,I0交换电流.
浓度差引起的相对电压如下:
(5)
式中,IL为限制电流,数值取决于实验数据.
其燃料电池输出电压V由相关的Nernst方程和Butler-Volmer公式可得[4]:
(6)
式中,I为电堆电流;r为电堆极化损失电阻.
2 SOFC系统仿真模型分析
整个逆变系统由以下6个组成:① 基本部分由功率开关管相互连接而成;② 变压部分由升压变压器组成,以得到400V交流电压;③ 整流部分变换成相同电压的直流电;④ 斩波部分中增加将变换器所输出电压进行过滤得相关器件;⑤ 逆变部分采用单相全桥逆变器;⑥ 最后在变换器与逆变器之间加设一个滤波器,其由电容和电感组成,目的是稳定电压.
逆变器部分的输出滤波器,主要滤除输出交流电压的高次谐波,图1为整个固体氧化物燃料电池发电逆变系统结构图.

图1 SOFC逆变系统的结构Fig.1 The structure of SOFC inverter system
通过上面的分析,可以构建其仿真模型,整个系统采用单相全桥逆变器,在逆变器中由正弦脉冲宽度调制(SPWM)控制其开关的通断,输出波形要经过滤波得到其相应的波形.滤波器的整个电路结构采用二阶滤波器,该滤波器的主要元件为电感与电容,其中并联电容的作用是对零散无用信号的衰减.
图2为采用改进型斩波变换器后输出的电压波形.该波形对0~1.5s这个时间段内的升压过程进行了分析,从输出电压波形可以看出,在时间为0.5s时电压达到理想值,然而在0.75s,0.82s区间,负载功率突变,变化值为500W,0.83s后输出电压达到稳定值,为后面逆变器提供稳定的直流电.图3为逆变器输出电压波形,从图3可以得出,仿真曲线图截取0.28s~0.36s3个正弦周期,整个输出电压波形相对稳定.

图2 DC/DC输出电压Fig.2 DC/DC output voltage

图3 DC/AC输出电压Fig.3 DC/AC output voltage
3 基于模糊-PID固体氧化物燃料电池控制
常规PID控制具有一定优点,如速度快、稳定性能好,由于受到量化误差影响使其控制精度降低,因此PID算法也存在一定的不足,常规PID算法很难控制其波形以取得较好的效果.针对动态响应问题,和PID控制方法比较,模糊控制有更好的效果,一方面其有处理采样环节和计算延时上优点;另一方面也会存在较差的稳定性能的问题.因此,本文针对上面两种方法的优缺点,提出基于模糊—PID的方法,以克服两种方法的不足.基于模糊—PID控制的逆变系统结构图见图4所示.
依据前文当中的理论分析,通过输出电压与理论电压可以得到其差值e,对误差e进行相应模糊化处理,使其输出相应的信号,分别为KP,KI和KD.整个控制仿真结构分为3个部分,即逆变处理模块、正弦脉冲调制模块以及模糊处理模块.本文仿真系统中的参数设置如下,调制度设为0.915,PID中参数分别为:200,45,0.05,图5为加扰动负载时系统的输出电压波形.

图4 交流输出电压Fuzzy-PID控制结构图Fig.4 Ac output voltage fuzzy-PID control structure

图5 输出电压电流波形Fig.5 Voltage output wave
从上图中可以得出,在没有扰动负载时,整个发电逆变系统动态响应较快,输出电压动态特性控制较好.通过调节KP, KI和KD3个参数,可以使可使系统达到理想值,以保证输出电压稳定性.图6为模糊PID控制输出电压FFT分析,通过快速傅里叶变换使其抑制谐波.将传统PID控制与本文提出的模糊-PID控制方法(Fuzzy-PID)进行比较,将本设计中PID的修正系数设为0,采集周期一致,阶跃响应时间设置为0.12s,得到通过传统PID控制的快速傅里叶输出电压分析曲线见图7所示.
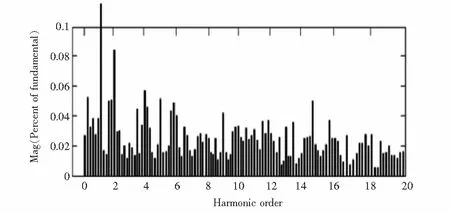
图6 模糊-PID控制输出电压FFT分析Fig.6 FFT analysis of voltage by fuzzy-PID control

图7 PID控制输出电压FFT分析Fig.7 FFT analysis of voltage by PID control
从图7可以分析,传统PID控制所得输出电压含有的谐波比模糊PID控制所得输出电压含有谐波高,相比而言,模糊-PID方法其控制震荡效果比常规PID要好.为了验证模糊-PID控制方法的稳定性,采取加入扰动负载后,观察其输出电压和电流波形,其参数设置同上.其变化波形见图8所示.

图8 扰动负载控制电压电流波形Fig.8 Voltage and current of load change
通过图8分析发现,加入扰动负载后,输出波形基本没有变化,在0.04s时电流发生相应地变化,仍为线性变化,对整个SOFC逆变系统的输出电压不会造成影响.因此说明了模糊-PID控制方法对于扰动负载具有较强的误差调节能力,能够较好的适应电压的快速变化,同时也说明了本文所提出的模糊-PID控制方法具有较好的可靠性.
4 结论
本文以固体氧化物燃料电池发电系统作为研究对象,对其数学模型、逆变系统以及输出电压控制算法进行分析.整个系统中在斩波变换器中增加反激式绕组以提高直流母线电压的稳定性,同时提出将模糊-PID控制算法应用到系统中以提高其动态响应,进行相应的仿真,相应的仿真结果证明了该算法具有稳定性和可靠性较强,输出电压含有谐波少等特点,因此模糊-PID控制算法应用于固体氧化物燃料电池发电系统中是适宜的.