截断重分配组合偏置推力分配算法
2018-11-22陈亚豪,徐海祥*,,李文娟
陈 亚 豪, 徐 海 祥*,, 李 文 娟
( 1.武汉理工大学 交通学院, 湖北 武汉 430063;2.武汉理工大学 高性能船舶技术教育部重点实验室, 湖北 武汉 430063 )
0 引 言
船舶在实际的定点定位过程中,当遇到海洋环境力较小,方向频繁地大角度变化的海况时,为保证动力定位船舶的操纵性,不允许将全回转推进器停止运转来输出零推力,并且由于推进器本身的物理特性,单位时间方位角转动的角度有限,推进器转动相对较缓慢,可能会导致滞后的现象,这就需要对推力分配算法进行改进来达到上述工况要求.
最早由Kongsberg提出了偏置的概念,其主要思想是对全回转推进器进行分组,允许全回转推进器之间相互抵消推力,各个组可以包含两到三个推进器,其中偏置量是指运行推进器使之相互抵消时,各推进器相互抵消的推力,并提出了组合偏置推力分配策略[1-2],通过允许全回转推进器与同组的推进器相互抵消,使偏置效果为零.Veksler等[3]在动力定位船舶推力分配的功率管理功能研究中,运用组合偏置推力分配策略,在立即减少推进器功率时,推力分配没有明显地偏离控制力的要求,从而提高了船舶快速减载能力.施小成等[4]提出了一种自适应组合偏置算法,通过优化算法得到的最优推力确定自适应偏置因子,从而计算出偏置量,再进行组合偏置推力分配,但是算法确定的偏置量是固定不变的,在外界环境力较小时将会产生多余的能量损耗.徐海祥等[5]提出了一种新的自适应组合偏置推力分配算法,该算法将偏置量分为两个部分:一部分是固定的偏置量,另一部分是随推力而实时变化的偏置量,算法具有良好的自适应性,但是算法只在纵向增加了偏置量,没有考虑禁区角问题和角度截断问题,在实际的工程应用上存在一定的限制.
为了实现组合偏置推力分配在实际动力定位中的应用,本文在文献[5]中提出的自适应组合偏置推力分配算法的基础上进行改进,考虑禁区角的影响,提出截断重分配的分配策略,并以一艘实验室模型船为研究对象,进行模型实验验证算法在实际工程应用中的效果.
1 推力优化分配数学模型
1.1 目标函数
在动力定位系统的应用中,推力优化分配数学模型的目标函数体现了操作者对动力定位船舶当前的控制要求,且在不同的工作要求下,其目标函数也各不相同.本文以船舶的能耗最小作为目标,建立如下的目标函数[6]:
(1)
式中:P为能耗,Ti为第i个推进器的推力,s为松弛变量,W、Q为权值矩阵.
1.2 约束条件
推力分配的首要任务是使推力优化分配结果尽量满足上层控制器所给出的控制指令,通过建立各个推进器推力与控制器之间的关系,来构建推力优化分配模型的等式约束.
为了避免复杂的非线性问题,本文采用了扩展推力的概念,将全回转推进器的推力分解为横向Y和纵向X上正交的推力:
u=(ux1uy1ux2uy2…uxnuyn)T∈R2n×1
(2)
由此,推进器的扩展型配置矩阵可以表示为
(3)
则等式约束可以表示为
τ=Bu
(4)
推进器在执行推力分配指令时,将会受到其自身力学性能的约束,主要有各个推进器推力上下限、推力变化率限制、全回转推进器角度变化率限制等约束,根据这些约束条件,构建推力优化分配模型的不等式约束:
Tj,min≤Tj≤Tj,max
ΔTj,min≤ΔTj≤ΔTj,max
Δαj,min≤Δαj≤Δαj,max
(5)
式中:Tj表示第j个推进器的推力大小,ΔTj表示第j个推进器一个周期的推力变化,Δαj表示第j个推进器一个周期的角度变化.
2 组合偏置推力分配算法
文献[5]提出了一种自适应偏置算法,将偏置量分为两个部分:一部分是固定的偏置量Δ1,另一部分是随推力而实时变化的偏置量Δ2.
Δ1由下式确定:
(6)
式中:TΔ为当前时刻的最大推力;μ为固定偏置量的系数,且μ∈(0,1);T1,max和T2,max分别为当前时刻1号推进器和2号推进器的最大推力.
随推力变化的偏置量Δ2可表示为
Δ2=|f/tanα|
α=(f/Tmax)ε×90
(7)
式中:f为当前时刻推进器的推力;α为当前时刻推进器的方位角,ε为角系数;Tmax为推进器的最大推力.
则在第k个采样周期时的自适应偏置量Δk可以表示为
Δk=Δ1+Δ2=
(8)
式中:δ为旋转系数.
上述的自适应偏置算法具有良好的实时性,且解决了在海洋环境力较小情况下偏置量过大的问题,但是该算法只是在推进器的纵向上增加了偏置量,使得在海洋环境力较小的情况下,推进器的角度会偏向纵向,这就导致推进器的推力方向在禁区角区域内,造成较大推力损失,且在实际的实验过程中发现,由于船舶推进器的位置误差、推进器的加工精度以及重心的测量误差等影响,这种分配方式可能会导致推进器推力分配失败.
针对上述算法存在的问题,本文在该算法的基础上进行改进,对推进器的纵向和横向都增加偏置量Δx和Δy,并根据船舶的禁区角区域范围,通过调整两个偏置量的大小,明显改变推进器的方向,使推进器推力方向避免进入禁区角.偏置量Δx和Δy由下式确定:
(9)
式中:α1、α2分别为禁区角的下限和上限.
在实际的船舶推力分配工程应用中,推进器频繁的转动,会造成推进器严重的机械磨损和大量的能量消耗.在自适应组合偏置推力分配中,为了避免推进器小角度地频繁转动,常常采用角度截断的方式来限制角度的变化,但是这种方法往往会影响控制力的分配.
针对上述问题,本文提出截断重分配的控制策略.该策略根据实际工程应用中推进器技术参数,设置一个合适的截断角度,并在得出分配结果后计算各推进器当前时刻与上一时刻角度的差值,将该差值与截断角度进行比较.当该差值大于截断角度时,采用固定角推力分配模式对推力进行重新分配;当该差值不大于截断角度时,不进行推力重新分配.截断重分配控制策略控制条件由下式确定:
γn,k-γn,k-1≤βn
βn=μnΔαn,max
(10)
式中:γn,k、γn,k-1分别为第k个、k-1个采样周期时第n个推进器的角度;βn为第n个推进器的截断角度;μn为第n个推进器的截断角度系数;Δαn,max为第n个推进器的最大角度变化率.
3 仿真结果及分析
为了验证截断重分配组合偏置推力分配算法的正确性及有效性,并与文献[5]中的自适应组合偏置算法进行对比,本文以实验室的一艘动力定位模型船为对象,该动力定位模型船具有3个全回转推进器,其推进器布置见图1,推进器相关的技术参数见表1.由于该动力定位模型船只有3个全回转推进器,推进器数量有限,无法将推进器进行组合实现组间偏置,所以在设计组合偏置算法时,将3个全回转推进器分为一组,进行组内偏置.从而设计了两种仿真方案:方案1采用文献[5]中的自适应组合偏置推力分配算法,方案2采用截断重分配组合偏置推力分配算法.

图1 推进器位置布置

表1 推进器技术参数
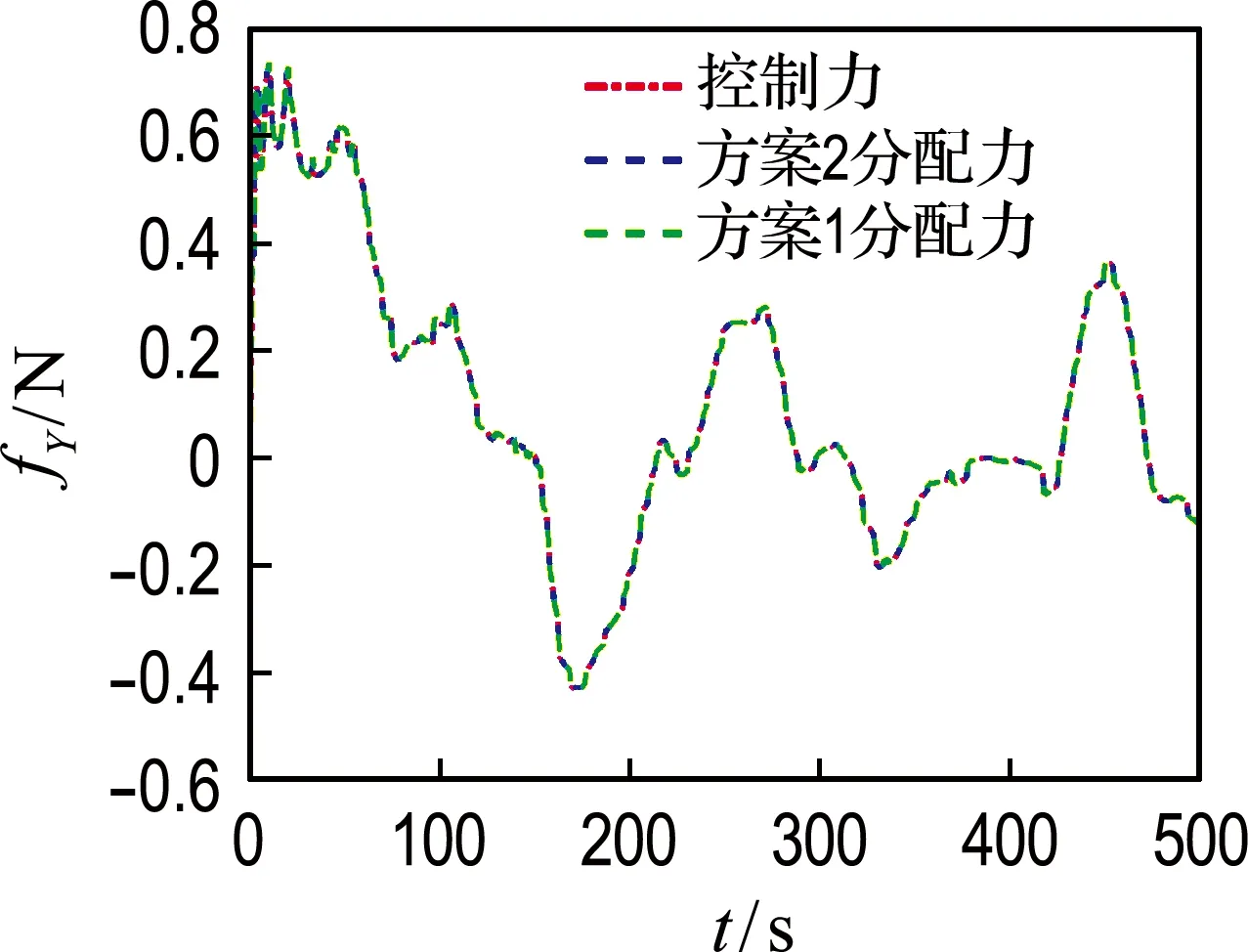
仿真模拟了海洋环境力较小,方向频繁大角度变化,控制系统要求推进器发出较小推力,甚至零推力的特殊工况,给定一组定点定位实验的控制力指令,如图2所示,该控制力指令是一组在模型船上实现了定点定位功能的控制力指令,具有比较好的参考价值,而且其控制力较小,且在零附近持续变化,满足运用偏置的前提要求.两个方案的自适应组合偏置算法的相关参数均取为ε=0.7,δ=0.8.方案2的截断角度设定为5°,1号推进器和2号推进器的禁区角范围分别为75°~105°和255°~285°,3号推进器距离1号和2号推进器较远,故3号推进器不考虑禁区角区域.

图2 控制力
仿真结果如图3~5所示.
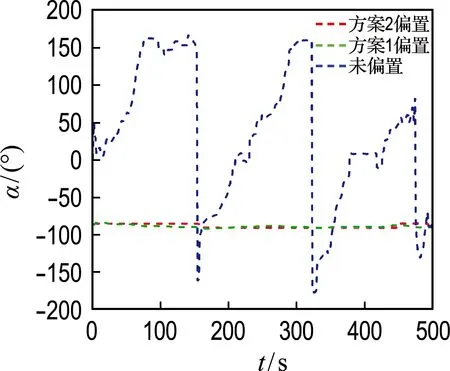
在图5中,方案1中1号推进器在90°附近小角度频繁变化,2号推进器在90°附近小角度频繁变化,3号推进器在-90°(270°)附近小角度频繁变化.方案2中1号推进器在140°附近短时间进行较小角度变化,长时间处于恒定状态;2号推进器在50°附近短时间进行较小角度变化,长时间处于恒定状态;3号推进器在-90°(270°)附近短时间进行较小角度变化,长时间处于恒定状态.
两个方案对比表明:
(1)由图3、4可知,两种分配方案都能够成功分配控制系统给出的控制力/力矩.
(2)由图5(a)可知,1号推进器的推力方向在方案1中处于禁区角区域内(75°~105°),在方案2中处于禁区角区域之外.方案2在进行推力分配时调整了1号推进器的推力方向,避免了推进器推力方向在禁区角区域内.
(3)由图5(a)、(b)可知,1号和2号推进器在方案1中一直处于小角度频繁变化的状态,在方案2中长时间保持角度恒定状态,短时间进行小角度变化.方案2避免了1号和2号推进器在小角度范围内进行变化,只有当角度变化超过设定的截断角度时才会进行变化.
(4)由图5(c)可知,3号推进器在两种方案中推力方向相同.由于3号推进器不考虑禁区角区域,故方案2没有调整3号推进器的推力方向.

(a) X方向
(b) Y方向

图4 控制力矩分配结果对比
(5)由图5(c)可知,3号推进器在方案1中一直处于小角度频繁变化的状态,在方案2中长时间保持角度恒定状态,短时间进行小角度变化.方案2避免了3号推进器在小角度范围内变化,只有当角度变化超过设定的截断角度时才会进行变化.
由仿真结果可知:对比文献[5]中的自适应组合偏置算法,本文算法能够在不影响控制力分配的条件下,调整推进器的推力方向,避免推进器的推力方向处于禁区角区域,且能通过截断重分配的策略避免推进器在小角度范围内进行变化,从而减少推进器之间相互干扰造成大幅推力损失和推进器频繁转动导致的严重机械磨损和大幅的能量消耗.

(a) 1号推进器

(b) 2号推进器
(c) 3号推进器
图5 推进器角度变化对比
Fig.5 Comparison of angle changes of thruster
4 实验结果及分析
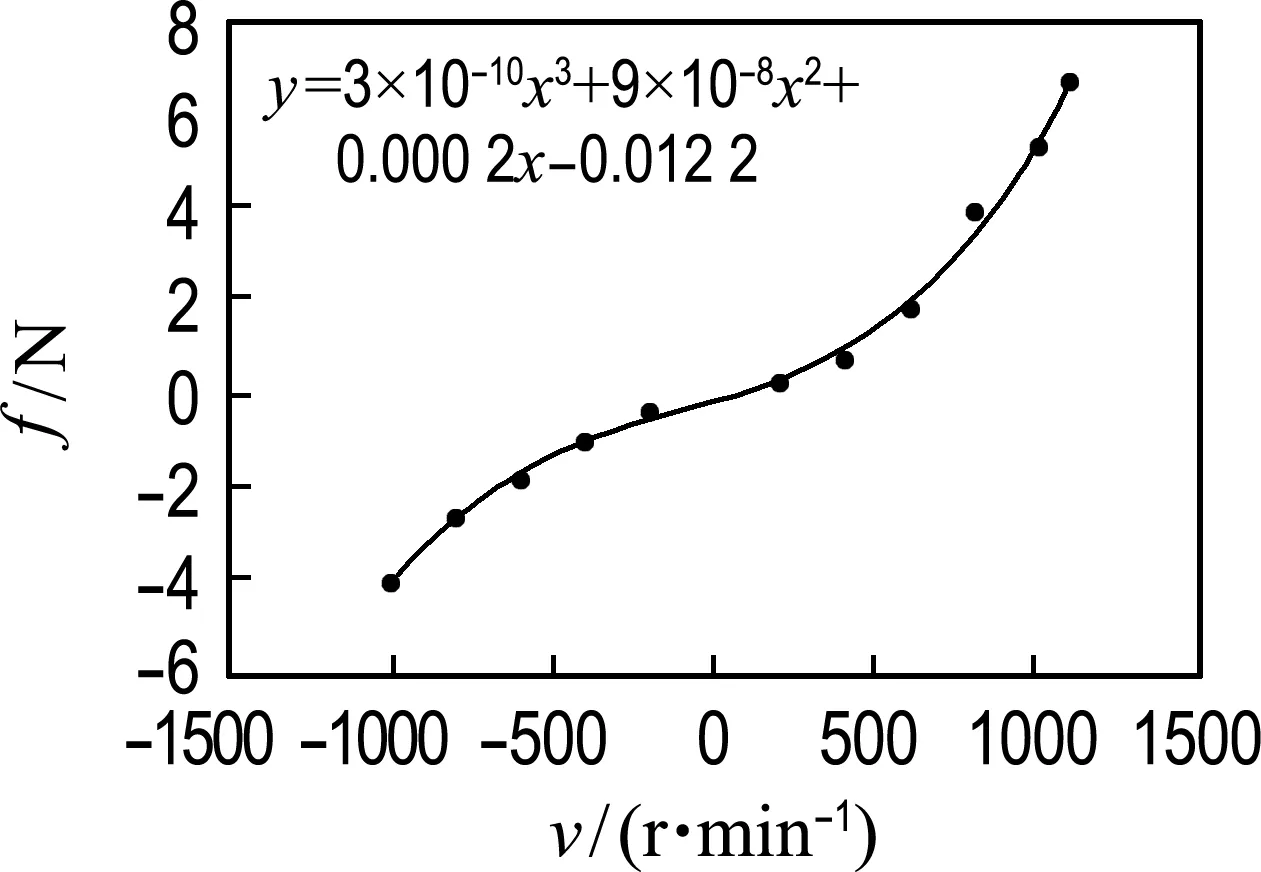
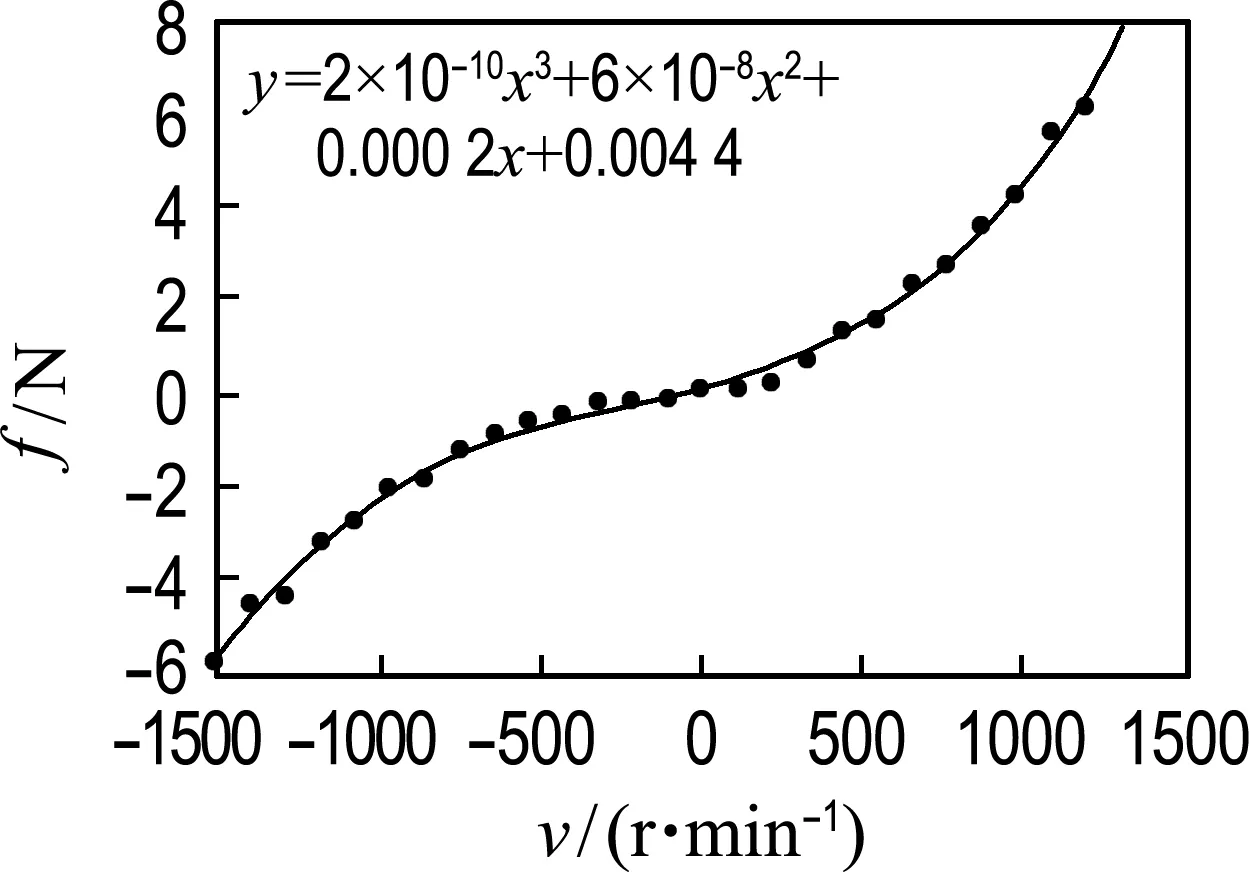
为验证算法在工程中的实际效果,在仿真的基础上进行了模型实验.推进器系统由船体艏部的一个全回转推进器以及尾部的两个全回转推进器组成,推进器的位置布置如图1所示,推进器的参数如表1所示,推进器的推力特性曲线见图6.
为了尽可能地实现环境力较小,方向频繁大角度变化的工况,本次模型实验在室外进行,环境条件为风速较小以及风向变化较大.实验选取的控制力指令满足控制系统要求,与仿真的控制指令相同,为一组定点定位的控制力指令,如图2所示.算法的相关参数与仿真同样设置:ε=0.7,δ=0.8,1号推进器和2号推进器的禁区角范围分别为75°~105°和255°~285°,截断角度设定为5°.
(a) 1号推进器

(b) 2号推进器
(c) 3号推进器
图6 推进器推力特性曲线
Fig.6Thrust characteristic curve of thrusters
实验结果如图7~10所示.
在图7中,船舶的位置从(4.5,4.0)移动至(4.0,3.5),并在(4.0,3.5)保持较好的稳定.在图8、9中,推力/力矩的分配几乎与控制推力/力矩相同.在图10中,3个推进器的角度都有一定的变化,但是不存在小幅度(≤5°)的频繁变化.
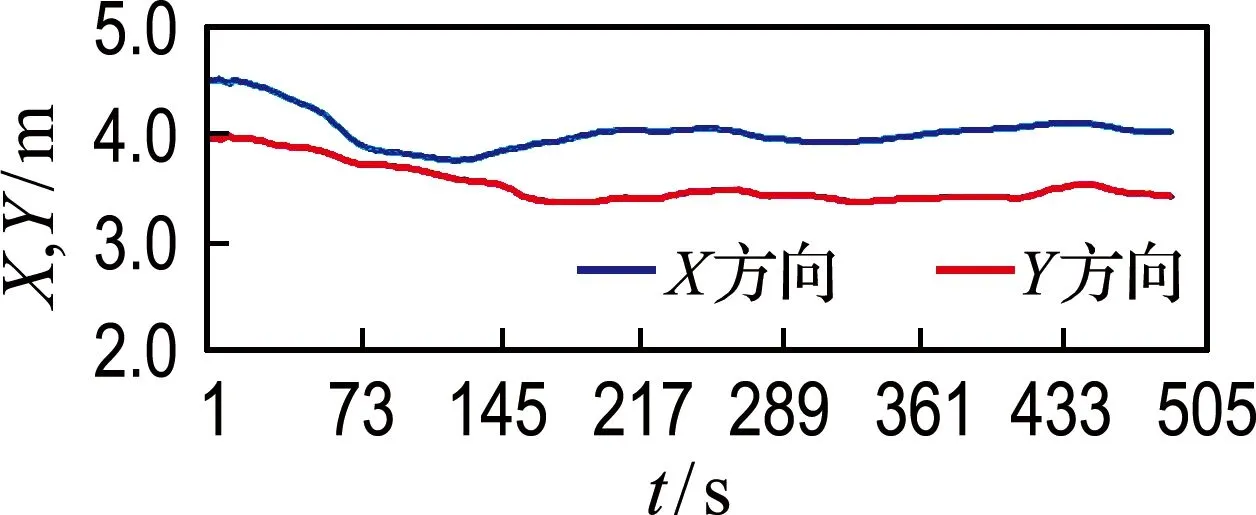
图7 船舶位置变化

(a) X方向

(b)Y方向
图8 推力分配结果
Fig.8 The result of thrust distribution
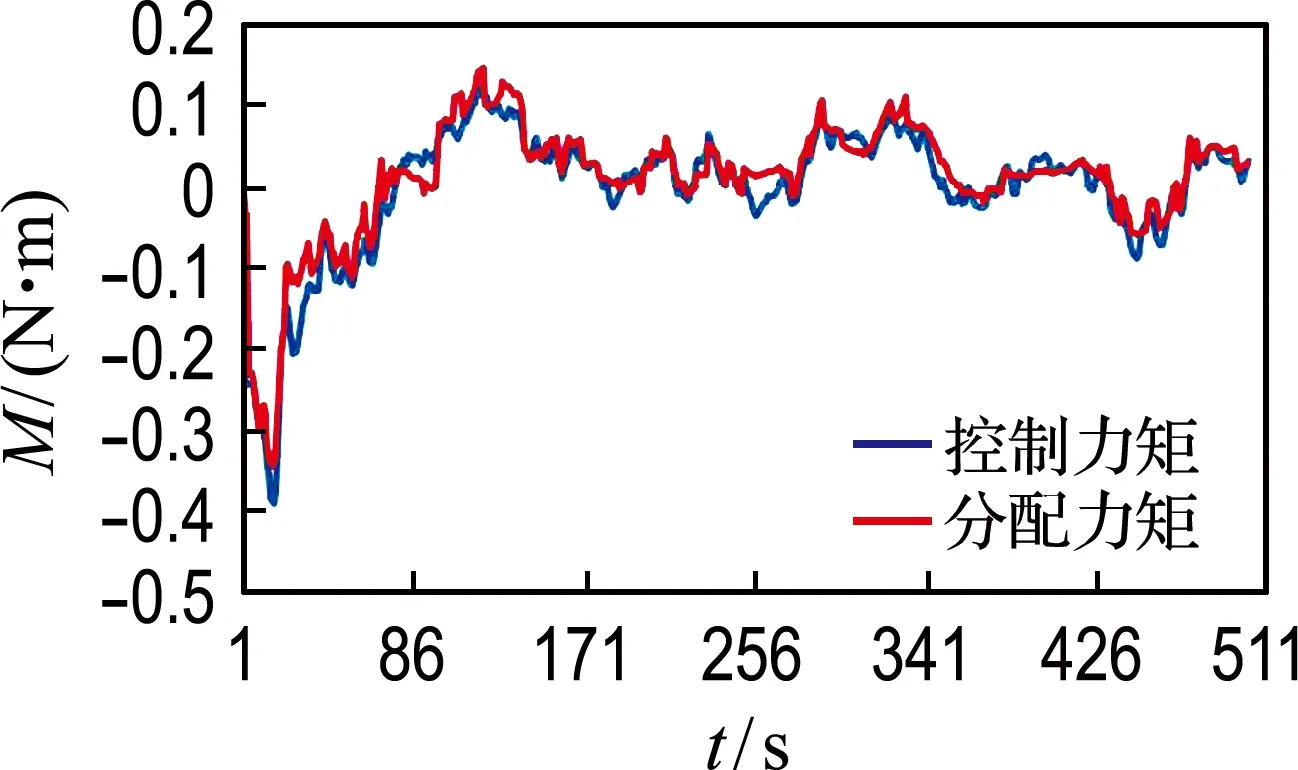
图9 力矩分配结果

图10 推进器的角度变化
实验结果表明:
(1)实验成功地实现了定点定位,并在定位点很好地保持了位置不变.
(2)成功地实现了推力分配,X方向、Y方向力和力矩的分配都很好地达到了控制要求.
(3)1号和2号推进器短时间处于禁区角范围内,长时间都处于禁区角范围之外,较好地避免了禁区角对推进器的影响.
(4)相比于理想情况,推进器的角度变化更大,这可能是由于实验过程中外界环境、信号干扰、推进器物理限制等因素导致的,但这样的角度变化在推进器的物理限制之内,且推进器避免了小角度(≤5°)的频繁变化,实现了截断重分配策略的目标.
5 结 语
本文在用组合偏置推力分配算法解决海洋环境力较小而方向变化频繁工况下的推力分配问题时,对于现有的自适应组合偏置推力分配算法在控制推进器方向和保持推进器稳定性上的不足,提出了截断重分配的策略,设计了截断重分配组合偏置推力分配算法.对该算法和现有的自适应组合偏置推力分配算法进行了仿真对比,结果表明:(1)两种算法都能够成功达到控制力/力矩的分配要求;(2)本文算法能够调整各个推进器的推力方向,避免推进器的推力方向处于禁区角区域;(3)本文算法能够避免推进器在小角度范围内频繁转动.模型实验验证本文算法能够减少船舶推进器的推力损失、机械磨损和能量消耗.
