基于扑翼式飞行器机构的研究
2018-11-20燕居怀纪培国
燕居怀,纪培国
(威海海洋职业学院,山东 威海264300)
0 引言
目前飞行器飞行方式有固定翼、旋翼和扑翼三种飞行类型,其中扑翼飞行是自然界飞行生物采用的飞行方式,也是三种飞行方式中最完美的飞行方式。通过观察大自然飞行生物的飞行姿态,可以看出扑翼飞行主要利用双翅的上下扑动产生升力和推力[1],这种飞行方式具有飞行灵活、飞行效率高,无需起飞和降落跑道等特点。
仿生扑翼飞行器主要通过观察大自然中飞行生物的飞行姿态而设计的一种飞行器,由于其飞行非常静音、可微型化,且外观非常像鸟类,因此在军事领域得到广泛的研究及应用[2],在民用方面可用来检测环境等,所以研究扑翼飞行器机构特点是近年来的热点。本文通过对鸟类骨骼以及四种传统扑翼式飞行器机构的研究,设计出一可以模仿鸟类飞行时复杂扑翼运动的飞行器。
1 传统扑翼机构分析
目前常用的扑翼机构有四种,第一种单曲柄双摇杆传动机构,第二种双曲柄双摇杆传动机构,第三种曲柄滑块机构,第四种凸轮弹簧机构。
1.1 曲柄双摇杆传动机构
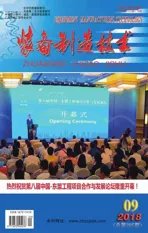
单曲柄双摇杆机构是结构最简单的一种扑翼传动机构,如图1所示,因此它的运功杆件最少,所以传动零件尺寸最小,整体质量最轻,目前很多单自由度的微型仿生扑翼机都采用这样的机翼驱动机构如图1所示。从图中可以看出单曲柄双摇杆机构两侧均有一套曲柄摇杆机构,但是这两个曲柄摇杆机构共用一个曲柄,因此这个曲柄驱动两侧曲柄摇杆机构作扑动动作时会导致左右两侧运动不对称,易导致飞行不稳定的现象,增加飞行控制难度。
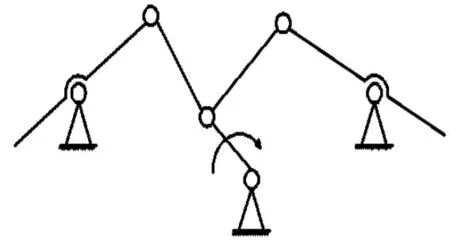
图1 单曲柄双摇杆机构
1.2 双曲柄双摇杆传动机构
如图2所示,双曲柄双摇杆传动机构左右两侧结构对称,两侧摇杆可形成对称运动,与单曲柄双摇杆传动机构相比增强了扑翼运动的稳定性,但是该机构并不能使连杆发生扭转。
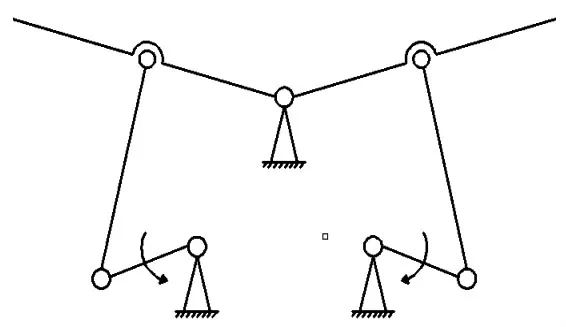
图2 双曲柄双摇杆传动机构
1.3 曲柄滑块机构
如图3所示,曲柄滑块机构中驱动曲柄使滑块沿导杆上下运动,滑块带动两侧连杆实现上下扑动。优点:结构简单、易于实现,缺点:滑块摩擦大、效率不高。
图3 曲柄滑块机构
1.4 凸轮弹簧机构
如图4所示,在凸轮转动下以及弹簧弹力作用下,推动底板上下运动,两侧摇杆均随着顶板作上下扑动运动。该机构的优点是只需设计凸轮轮廓曲线,就可实现扑动运动,缺点是机构比较复杂,难以微小化,并且能量损失多,效率不高。
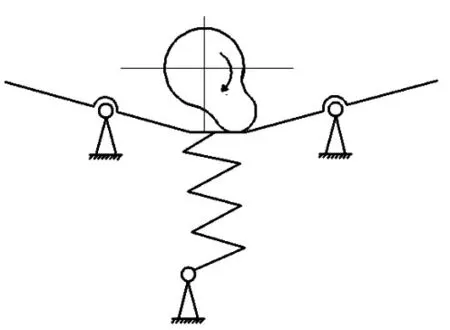
图4 凸轮弹簧机构
2 双曲柄双摇杆传动机构优化设计
扑翼机构的设计始终是制约扑翼飞行器发展的核心问题。目前应用最广的扑翼机构是单曲柄双摇杆机构和双曲柄双摇杆机构,但是由于单曲柄双摇杆传动机构扑翼运动的不对称性,从而影响扑翼运动的稳定性,以及双曲柄双摇杆传动机构虽然扑翼运动对称,但是只能简单的做上下扑动动作,而鸟类飞行翅膀还伴随着扭转动作,基于以上原因,尽管扑翼式飞行是最完美的飞行方式,但是至今还未普及应用。
本文针对扑翼运动不对称和扑翼不能扭转两个问题,在双曲柄双摇杆机构基础上进行优化,使得扑翼在扑动时能够扭转,该设计能够扭转机翼翼面,从而可以实现主动俯仰或扭转运动。
本论文采用双曲柄双摇杆为扑动机构,如图5所示为扑动传动机构的三维模型,扑翼采用多级连杆机构如图6所示,便于机翼折叠和展开;扑翼通过两个微型舵机实现扭转,扑翼扭转前机构如图7所示,通过微型舵机控制带动翼杆转动使翼翅扭转一定的角度,扭转后如图8所示,以此扭转运动得以实现。并且翅翼形状采用上凸下凹形式如图9所示,这样可以有效减小扑翼上扑时的阻力,以及增大下扑时的升力。
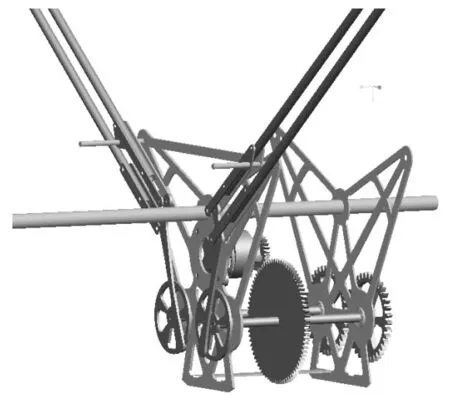
图5 扑动传动机构
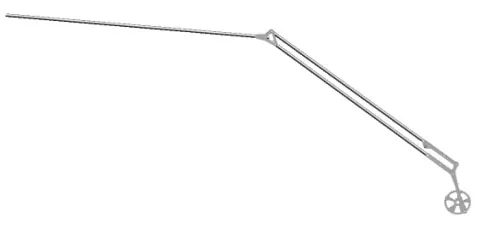
图6 扑翼连杆机构
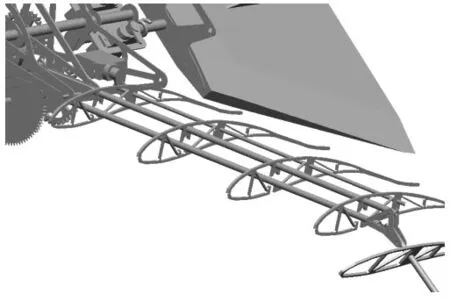
图7 扑翼扭转前机构
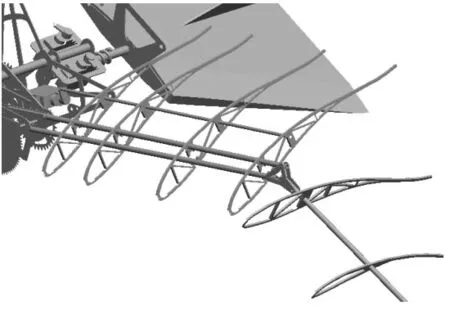
图8 扑翼扭转后机构
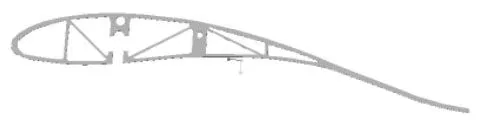
图9 翅翼外观
具体实施方式:直流无刷电机输出的动力通过小齿轮带动大齿轮,大齿轮带动转轴转动,转轴同时带动中齿轮转动,两个中齿轮同步转动,同时两个中齿轮带动连杆上的偏心轮做圆周运动,从而使得扑翼连杆作上下扑动动作。这样设计的优点在于,左右机翼上下扑动频率和扑动幅度大小时刻保持一致,受到空气作用力一样为稳定飞行减少了控制难度。该机构实际上是一种平面机构,结构紧凑,易于实现,调整方便,重量可控。左右机翼的扭转是通过两侧的微型舵机带动翅翼发生扭转运动来实现的[3]。
3 结论
本文是在传统机构双曲柄双摇杆机构基础上进行优化设计的一款机翼可扭转的扑翼飞行器,机翼的扭转是通过微型舵机控制的。由于本文只是在传统机构上增加了一个扭转机构,并未在具体数据上进行设计,因此可在以后的研究中可进行仿真优化设计。并且扑翼采用多级连杆机构,可使扑翼飞行器在复杂空间中便于扭转、折叠和展开。而翅翼形状采用上凸下凹形式,这样可以有效减小扑翼上扑时的阻力,以及增大下扑时的升力,可提高扑翼飞行器飞行效率。