Optimization of Structure Layout for Three-FOV Star Sensors*
2016-09-09WUFengZHUXifangHUAGuodongFANMengyaCanChangzhouInstituteofTechnologyChangzhouJiangsu2002ChinaChangzhouInstituteofModernPhotoelectricTechnologyChangzhouJiangsu2002ChinaNanjingLiShuInformationTechnologyCoLtdNanjing20000Chin
WU Feng,ZHU Xifang*,HUA Guodong,FAN Mengya,LÜ Can(.Changzhou Institute of Technology,Changzhou Jiangsu 2002,China;2.Changzhou Institute of Modern Photoelectric Technology,Changzhou Jiangsu 2002,China;.Nanjing LiShu Information Technology Co,Ltd,Nanjing 20000,China)
Optimization of Structure Layout for Three-FOV Star Sensors*
WU Feng1,2,ZHU Xifang1,2*,HUA Guodong3,FAN Mengya1,LÜ Can1
(1.Changzhou Institute of Technology,Changzhou Jiangsu 213002,China;2.Changzhou Institute of Modern Photoelectric Technology,Changzhou Jiangsu 213002,China;3.Nanjing LiShu Information Technology Co,Ltd,Nanjing 210000,China)
The coordinate systems related to three-FOV star sensors and their rotation relationships were investigated. The method of calculating guide star numbers within FOV of three-FOV star sensors was discussed and presented. The foundation and method to optimize the structure layout of three-FOV star sensors were pointed out.By Monte Carlo simulation,probabilities of capturing guide stars were calculated.Optimization results of structure layout were presented and analyzed.Attitude measurement accuracy,guide star capture probability and optical system design difficulties were traded off.The optimum values of limiting magnitude,FOV and elevation angle of optical axes were chosen to be 5.0 magnitude,11°×11°and 40°respectively.At this moment,probabilities of capturing more than 4 guide stars reaches 99.43%.
star sensor;three-fov;optimization;monte carlo simulation;guide star
星敏感器是一种高精度的姿态测量仪器,成为该领域的研究热点[1-3]。目前使用的星敏感器通常含有一个光学系统,称为单视场星敏感器。如果将几个相同的光学系统按照一定的空间分布组合,并共用一个数据处理单元,即构成多视场星敏感器。与单视场星敏感器相比,在同等有效视场的条件下,多视场星敏感器每个光学系统的视场角较小,姿态测量精度更高。各光学系统指向不同的天空区域,多视场星敏感器可以克服单视场星敏感器横滚轴精度低于俯仰和偏航轴的缺点。同时,各个光学系统配置灵活,既可同步工作,也可异步工作,系统稳定性高。例如,清华大学设计的双视场星敏感器采用了2个光轴相互正交的光学系统,提高了横滚轴的测量精度[4]。中国卫星海上测控部将双视场星敏感器用于测量船体姿态[5]。美国Microcosm公司研制的Daystar系统和法国SODERN公司研制的HYDRA系列星敏感器,采用3个视场来提高了三轴测量精度[6-7]。
星敏感器只有捕获一定数量的导航星,才能成功测量姿态[8-9]。视场角和口径越大,视场内的导航星数越多,但光学系统变得更复杂,重量更重。多视场星敏感器各个光学系统光轴之间的夹角灵活可变,类似参考文献[10],本文用光学系统光轴间的夹角来表征多视场星敏感器的结构布局。当光学系统具有给定大小的视场和口径时,优化结构布局有利于提高星敏感器捕获指定数量导航星的概率,确保姿态测量的顺利开展。同时,在满足导航星捕获概率的条件下,优化多视场星敏感器结构布局,有助于降低视场和口径要求,对减轻星敏感器重量,降低研制成本有重要意义。
北京航空航天大学在多视场星敏感器结构优化方面的研究处于领先地位,王真和魏新国等依据星光矢量夹角与星敏感器姿态测量精度的关系,优化多视场星敏感器安装结构,得出三视场星敏感器各视轴相互正交时,精度最高的结论[11]。本文以具有三个光学系统的三视场星敏感器为研究对象,在分析星敏感器系统结构的基础上,依据所选导航星星库,通过统计给定视场和极限星等对应的导航星捕获概率,讨论三视场星敏感器结构布局优化方法,给出优化结果。
1 三视场星敏感器的相关坐标系统
研究星敏感器技术较常使用的坐标系有惯性坐标系和本体坐标系,分别设为Oi-XiYiZi和Ob-XbYbZb。本文研究还需建立与三视场星敏感器每个光学系统固连的坐标系,称之为子系统坐标系,设为Ok-XkYkZk,其中k取1、2或3,分别对应每个光学系统。
首先,建立子系统坐标系。将光学系统等效为理想成像系统,Hk和Hk′分别为其物、像方主点,f为光学系统的焦距,子系统坐标系的原点Ok取在光学系统的像方主点Hk′处。Xk、Yk、Zk三轴成右手坐标系,其中Xk轴、Yk轴在像方主面内,分别平行于探测器焦平面的行和列。Zk轴沿光轴,正方向指向物面。恒星在第1个子系统坐标系中成像的示意图如图1所示。
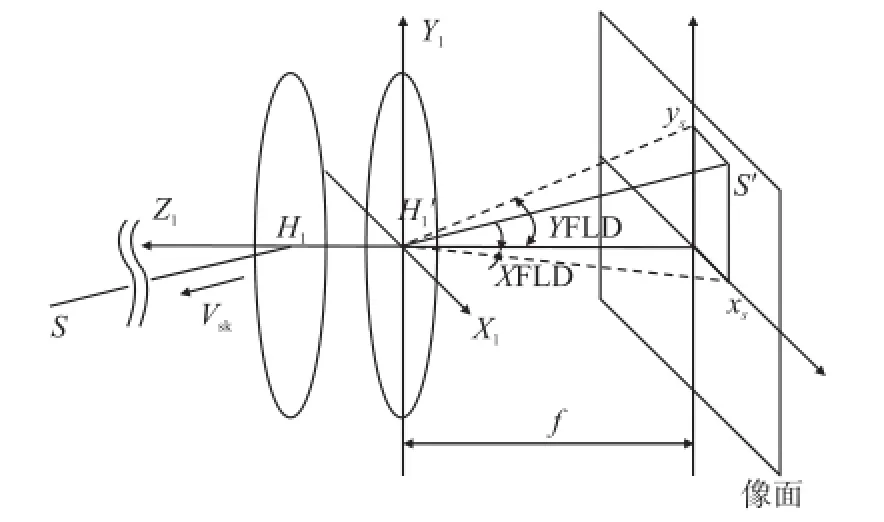
图1 恒星在第1个子系统坐标系中成像的示意图
如果观测星S理想成像为S′,S′在第一个子系统坐标系中的坐标为(xs,ys,-f)时,那么观测星S在该子系统坐标系中的方向余弦矢量为
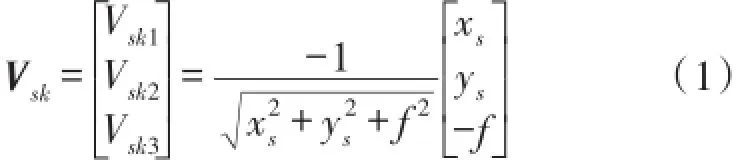
那么它在Xk和Yk方向的视场角为

接着,建立本体坐标系。为便于星敏感器制造和装配,三个光学系统光轴选择对称形式,相互之间的夹角相等。为此,本文将如图2所示的坐标系Ob-XbYbZb权当作本体坐标系。其中,原点Ob取为Z1、Z2、Z3三轴的交点,Zb轴与Z1、Z2、Z3有相同的夹角,设夹角为φ。X1O1Z1面与XbObZb面的夹角为τ。在本体坐标系Ob-XbYbZb中,子系统坐标系光轴的方位角间隔为120°,仰角为90°-φ。由图2可见,角度φ或仰角决定了三个光学系统相互之间的位置关系。
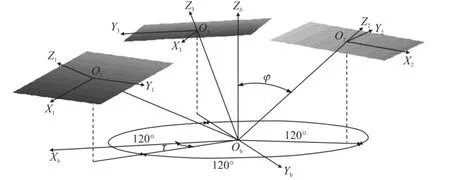
图2 本体坐标系与子系统坐标系的相互关系
2 视场内导航星数目的统计方法
由图2可见,当给定角度φ、τ和本体坐标系Zb轴在惯性坐标系中的指向(αc、δc)时,三个光学系统在惯性坐标系中的位置以及所观测到的星空也确定了,由此可确定视场内的导航星星数。本节根据惯性坐标系、本体坐标系和子系统坐标系的关系,讨论三个光学系统视场内导航星数的确定方法。
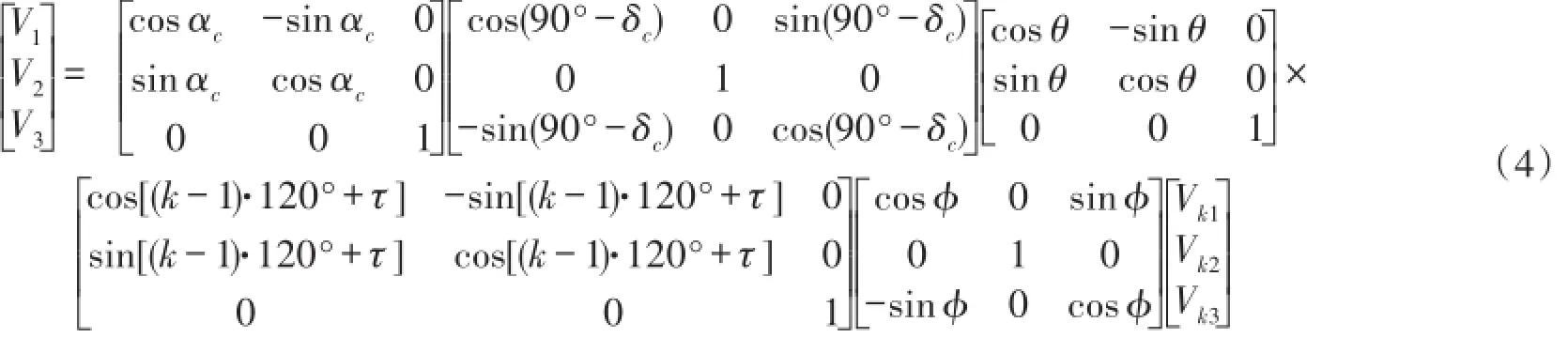
惯性坐标系O-XiYiZi通过旋转3次,可与本体坐标系Ob-XbYbZb重合。惯性坐标系先绕Zi轴由+Xi轴向+Yi轴旋转αc,得到X′Y′Z′坐标系,新坐标系再绕Y′轴由+Z′轴向+X′轴旋转90°-δc,得到X″Y″Z″坐标系,该坐标系绕Z″轴旋转θ,得到的坐标系与本体坐标系重合。其中θ由本体坐标系Xb轴和Yb轴的实际指向决定。类似的,本体坐标系Ob-XbYbZb通过旋转2次,可与子系统坐标系Ok-XkYkZk重合。本体坐标系先绕Zb轴由+Xb轴向+Yb轴旋转τ+(k-1)· 120°,得到Xk′Yk′Zk′坐标系,新坐标系再绕Yk′轴由+ Zk′轴向+Xk′轴旋转φ,得到的坐标系与子系统坐标系Ok-XkYkZk重合。
那么,如果一颗星S在惯性坐标系中的坐标为(α,δ),那么它在子系统坐标系Ok-XkYkZk中的方向余弦矢量为

类似的,如果一个向量在子系统坐标系Ok-XkYkZk中方向余弦矢量为{Vk1,Vk2,Vk3},那么它在惯性坐标系中的矢量为
首先,针对选定的导航星星库,根据每个光学系统的光轴在惯性坐标系中的指向和光学系统视场大小,初步筛选导航星。子系统坐标系Ok-XkYkZk的Zk轴在该坐标系的方向矢量为{Vk1,Vk2,Vk3}={0 01},那么根据式(4)计算它在惯性坐标系的指向{V1,V2,V3},对应赤径、赤纬(αzk,δzk)为δzk=sin-1(V3),
只有导航星星库中坐标(α,δ)满足

的导航星才可能出现在第k个光学系统的视场内,其中wm表示该光学系统像面探测器对角线对应的视场角。
接着,根据式(3),将所挑选的导航星的位置从惯性坐标系转换到子系统坐标系。
最后,根据式(2),计算导航星在子系统坐标系Ok-XkYkZk中的视场角。如果光学系统在Xk,Yk方向上的最大视场角为wA和wB,只有满足

的恒星才能被第k个光学系统观测到,以此确定它们是否出现在该光学系统的视场中。根据以上方法,统计得到每个光学系统视场内的导航星,计算此时可观测到的导航星总数。
3 结构布局的优化
优化三视场星敏感器的结构布局,主要是合理选择子系统坐标系Zk轴与本体坐标系Zb轴的夹角φ(或光学系统光轴的仰角)。在同等条件下,φ值不同,星敏感器捕获相同数量导航星的概率也不同。在满足指定数量导航星捕获概率的要求下,最优的φ值应能使得极限星等最低、视场角最小。
本文主要研究用于可见光波段的三视场星敏感器,选用SKY2000星表为恒星数据来源,根据导航星选取方法[12],构建了导航星星库。在三视场星敏感器捕获4颗以上导航星的概率达到99%的要求下[13],考察当极限星等Mv分别取4.8、4.9、5.0、5.1、5.2、5.3时,根据第二节方法统计视场角、φ和捕获概率的关系。
为便于分析,光学系统在Xk、Yk方向上的最大视场角取相等的值,即wA=wB。对于每个极限星等,夹角φ以5°为间隔,从20°逐渐增加到80°。针对每个极限星等和φ值,再改变视场角大小。对于选定的极限星等、φ、视场角,开展蒙特卡罗仿真,统计三个视场内出现4颗以上导航星的概率,统计结果如图3所示。
由图3可见,对于同一个极限星等,当视场角保持不变时,导航星捕获概率随着φ的改变而起伏变化。对于不同的视场角,两者的关系曲线有较一致的起伏,概率最大值处对应的φ值相同。当极限星等Mv=4.8时,各视场角的捕获概率最大值出现在φ=60°处。类似的,当极限星等为4.9、5.0、5.1、5.2和5.3时,捕获概率最大值分别出现在φ=60°、50°、50°、50°和45°处。但视场角越大,捕获概率和φ的关系曲线越平坦。当极限星等Mv=4.8,视场角wA分别取11.5、12°、12.5°、13°时,捕获概率变化的最大值分别为0.68%、0.55%、0.4%、0.24%。因此,当视场角较小时,开展星敏感器布局优化,对于提高导航星捕获概率更有意义。此外,视场角越大,相同φ值对应的导航星捕获概率也越大,捕获概率和φ的关系曲线随着视场角的增大逐渐上升。当Mv=4.8、φ=60°时,视场角11.5°、12°、12.5°、13°对应的捕获4颗以上导航星概率分别为97.95%、98.87%、99.41%、99.70%。视场角每增加0.5°,对应的概率分别增加0.92%、0.54%、0.29%。可见,当视场角较大时,通过增大视场角来提高导航星捕获概率的难度更大。
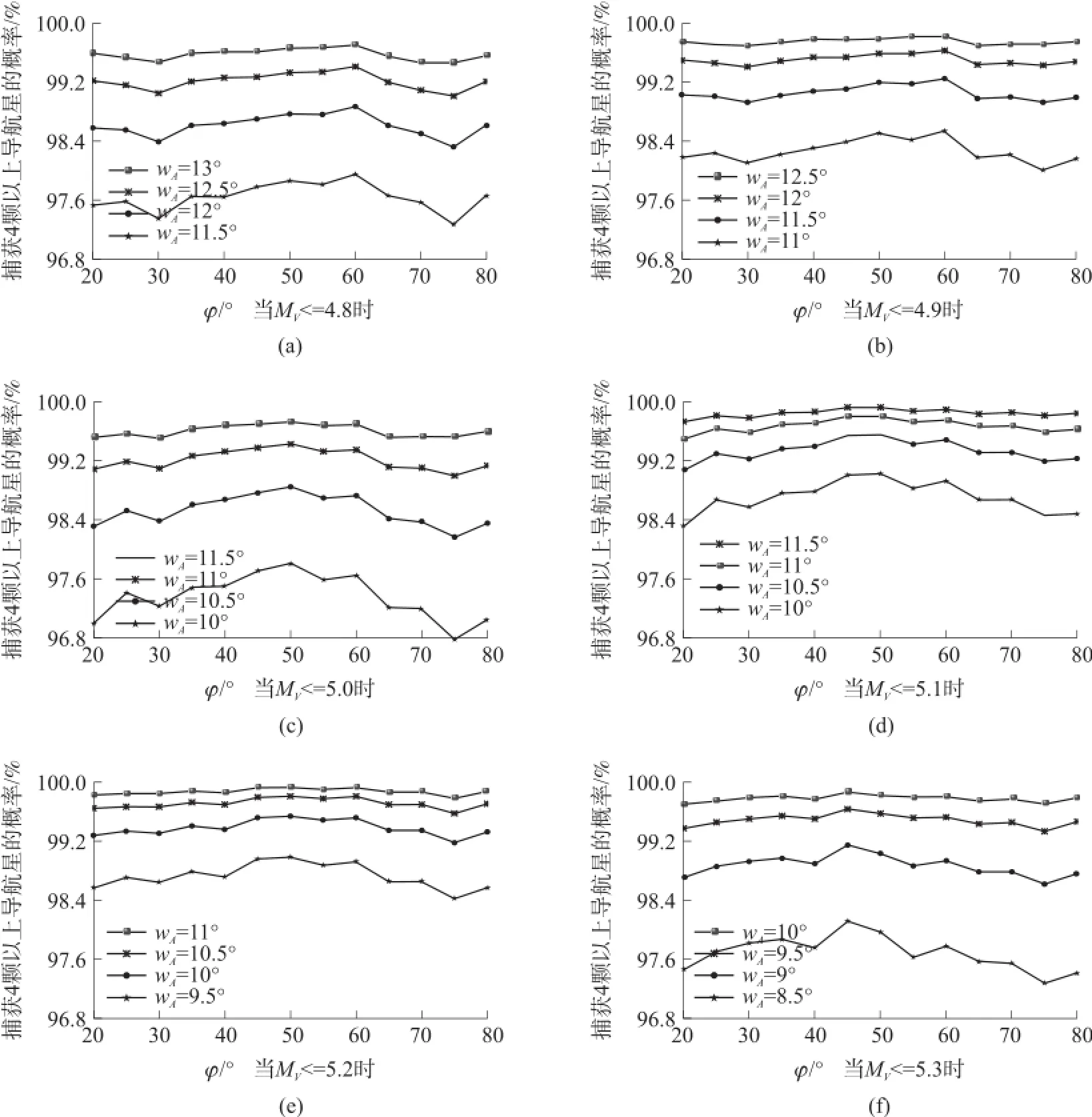
图3 三视场星敏感器捕获4颗以上导航星的概率分布(wA=wB)
对比图3中的6幅图,可见,视场角和φ值保持不变时,导航星捕获概率随着极限星等的增加而增加。极限星等越高,视场内的导航星也越多,出现相同数量导航星的概率越大。选择较高的极限星等和较小的视场角,或者较低的极限星等和较大的视场角,都可能满足捕获4颗以上导航星概率达到99%的要求。
各极限星等所需的视场角和对应的最优φ、仰角、三个光学系统光轴夹角如表1所示。由于极限星等越高,所需的光学系统口径越大,光学系统重量显著增加。较低极限星等所需的光学系统口径较小,但视场角应较大,设计难度会有所增加。同时,参考文献[11],为使星敏感器获得高的姿态测量精度,本文折中选择极限星等为5.0等,视场角wA=11°,φ取50°,对应的仰角为40°,此时三个光学系统光轴的夹角为83.12°,捕获4颗以上导航星的概率达到99.43%。

表1 当wA=wB时,三视场星敏感器结构布局优化结果
4 结论
三视场星敏感器采用3个光学系统对不同的星空区域成像,在同等有效视场的条件下,光学系统视场角比单视场星敏感器更小,姿态测量精度更高。对于给定的极限星等和视场角,三视场星敏感器捕获4颗以上导航星的概率随着光学系统光轴与本体坐标系Zb轴的夹角或仰角的变化而变化,最优角度值能使捕获概率最大,保证星敏感器星图识别的顺利开展,提高姿态测量性能。同一极限星等,当视场角较小时,优化结构参数能更大幅度地提高导航星捕获概率,获得更好的优化效果。综合考虑设计难度、姿态测量精度,极限星等、视场角和仰角分别选择为5.0等、11°×11°和40°,此时捕获4颗以上导航星的概率为99.43%。优化结果为三视场星敏感器光学系统设计提供依据。
[1]Tkachenko A I.Algorithms of the Attitude Matching of Star Track⁃ er and Camera of Spacecraft[J].Journal of Automation and Infor⁃mation Sciences,2015,47(5):30-41.
[2]Malak Samaan,Stephan Theil.Development of a Low Cost Star Tracker for the SHEFEX Mission[J].Aerospace Science and Technology,2012,23(1):469-478.
[3]郝云彩,王大轶.空自主导航光学敏感器及其验证[J].空间控制技术与应用,2012,38(3):5-10.
[4]尤政,邢飞,董瑛.双视场星敏感器及其利用其进行星图识别的方法[P].中国专利,2004100911824,2005-04-27.
[5]刘冰,朱伟康,张同双,等.基于双星敏感器的船体姿态确定[J].光学精密工程,2014,22(3):569-575.
[6]Truesdale Nicholas,Dinkel Kevin1,Dischner Zach,et al.Daystar:Modeling and Testing a Daytime Star Tracker for High Altitude Bballoon Observatories[C]//Proceedings of the 36th AAS Guid⁃ance and Control Conference,San Diego:Univelt Inc,2013,149:47-61.
[7]Blarre L,Perrimon N,Airey S.New Multiple Head Star Sensor(HYDRA)Description and Development Status:A Highly Autono⁃mous,Accurate and Very Robust System to Pave the Way for Gyro⁃less Very Accurate AOCS Systems[C]//Proceedings of the AIAA Guidance,Navigation,and Control Conference,2005:817-825.
[8]熊雪,王庆.基于多视场星敏感器的三角形星图识别方法[J].计算机测量与控制,2014,22(1):225-228.
[9]王昊京,王建立,吴量,等.三视场定位定向设备的视场确定[J].红外与激光工程,2015,44(6):1890-1897.
[10]李健,张广军,魏新国,等.多视场星敏感器数学模型与精度分析[J].红外与激光工程,2015,44(4):1223-1228.
[11]王真,魏新国,张广军,等.多视场星敏感器结构布局优化[J].红外与激光工程,2011,40(12):2469-2473.
[12]吴峰,沈为民,朱锡芳.一种采用十字链表的星敏感器筛选导航星的方法[P].中国专利,2012,10343943.5.2013-1-9.
[13]吴峰.自主导航星敏感器关键技术的研究[D].苏州:苏州大学,2012.

吴峰(1978-),男,2012年于苏州大学获得博士学位,现为常州工学院副教授,主要从事星敏感器技术方面的研究工作,wufeng@czu.cn;

朱锡芳(1965-),男,2008年于南京理工大学获得博士学位,现为常州工学院教授,主要研究方向为光电子器件、图像处理,zhuxf@czu.cn。
EEACC:723010.3969/j.issn.1004-1699.2016.06.009
三视场星敏感器系统结构布局的优化*
吴峰1,2,朱锡芳1,2*,华国栋3,樊梦雅1,闾灿1
(1.常州工学院电气与光电工程学院,江苏常州213002;2.常州现代光电技术研究院,江苏常州213002;3.南京栎树信息科技有限公司,南京210000)
研究了三视场星敏感器的相关坐标系及旋转关系,讨论并给出计算视场内导航星数目的方法,指出优化三视场星敏感器结构布局的依据和途径。通过蒙特卡罗仿真,统计导航星捕获概率,给出了结构布局优化结果。从姿态测量精度、导航星捕获概率、光学系统设计难度方面折中考虑,选择极限星等、视场角和光学系统光轴仰角的最佳参数分别为5.0等、11°×11°和40°,此时捕获4颗以上导航星的概率达到99.43%。
星敏感器;三视场;优化;蒙特卡罗仿真;导航星
TH744;TP752.1
A
1004-1699(2016)06-0841-05
2015-10-03修改日期:2016-02-05
项目来源:江苏省“青蓝工程”项目(C810713005);常州现代光电技术研究院开放课题项目(CZGY007)
猜你喜欢
杂志排行

传感技术学报的其它文章
- Construction of a Cell Impedance Biosensor Based on Graphene Oxide/Polypyrrole-Indium Tin Oxide Micro-Electrode for Detecting Cell Adhesion and Proliferation*
- Acetone Gas Sensor Based on Al-Doped ZnO and Influence of Ultraviolet Excitation on Gas-Sensing Properties*
- Research of Fusion Classification of EEG Features for Multi-Class Motor Imagery*
- An Improved Method for Noninvasive Detection of Blood Glucose of Conservation of Energy Metabolism*
- Genetic Algorithms of Electromagnet in Longitudinal Wave Electromagnetic Utrasonic Dtection for Auminum Pate*
- Simulation and Experimental Investigation of Thickness Measurement Using Pulsed Eddy Current Technique*