成都3号线电客车TCMS系统功能浅析及典型故障分析
2018-11-15贺皓东
贺皓东
(成都地铁运营有限公司, 成都 610015)
成都3号线车辆TCMS系统按照IEC 61375-1标准规定的列车通信网络构建,列车总线与车辆总线均采用MVB总线,此结构严格意义上说是一级总线的单层网络,只是通过增加两组带冗余的中继器实现3个网段,在形式上可以分为干线网络和支路网络。总线采用冗余传输,保证数据传输的可靠性。MVB总线的传输速率为1.5 Mb/s。MVB总线可以传输过程数据、消息数据和监视数据。多功能车辆总线(MVB)的电气接口为EMD介质。
1 3号线TCMS系统网络拓扑图及冗余功能介绍
TCMS系统设备留有标准的通信接口,具有成熟可靠的接口通讯规范,子系统通过MVB通讯接口的可靠接入。车辆总线(MVB)上子系统的控制单元主要包括:车载ATC装置、牵引控制单元、制动控制单元、辅助电源控制单元、空调控制单元、车门主控制单元、列车乘客信息显示系统控制单元等。成都3号线列车拓扑结构图如图1、表1所示。
TCMS系统作为列车运行的“大脑”,对运行可靠性(是指产品在规定的条件下和规定的时间内,完成规定功能的能力)的要求很高。3号线TCMS系统在设计之初充分考虑,将设备故障的影响尽可能降到最低,在硬件设备的冗余性及监控信息的判断上进行互为冗余的配置,具体如下:
(1) MVB总线冗余:MVB总线采用两对互为冗余的双绞线,采用DB9连接器,MVB线路A和线路B同步发送相同的数据,该冗余设计可以防止传输线、引脚接点以及收发器的错误引起的MVB传输故障。车辆间MVB总线采用MVB分线盒把一路MVB总线分成二路传输(A路B路分开传输),一路故障不影响车辆的MVB通信。示意图如图2、图3所示。
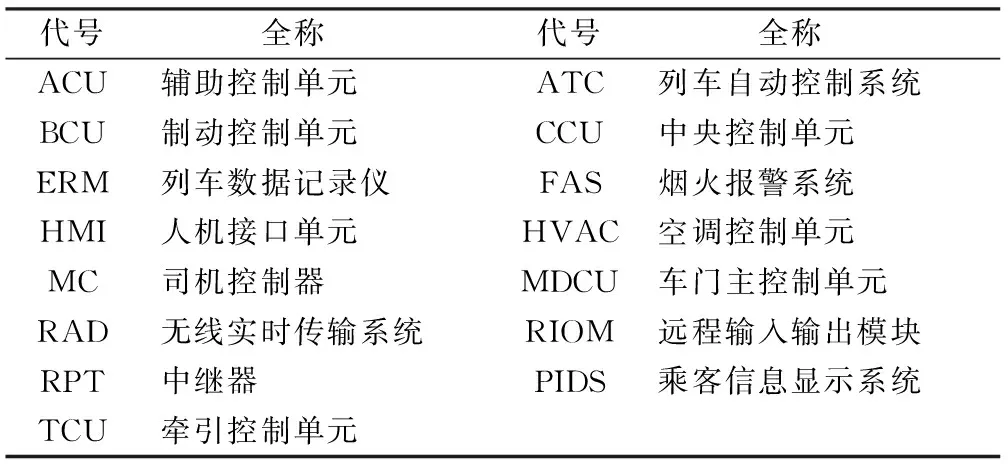
表1 3号线车辆设备简称表
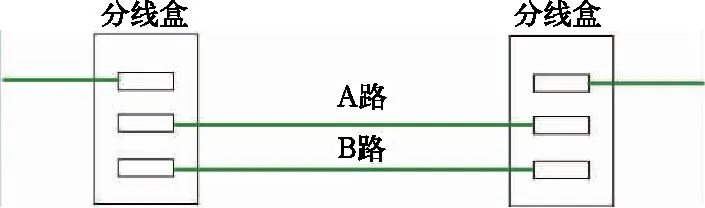
图3 MVB分线盒冗余示意图
(2) CCU冗余:中央控制单元CCU在配置上为Tc1、Tc2两端冗余,完成列车控制、监视和故障诊断功能,一般情况Tc1为主机,Tc2为从机,Tc1故障时将进行冗余切换,切换时间3 s以内。
(3) 中继器冗余:在列车的2车和5车分别安装互为冗余的中继器(RPT)模块,当一个中继器模块故障时,另一个中继器模块对信号进行中继传输不影响列车的正常运行。
(4) Tc车RIOM模块冗余:Tc1车和Tc2车各设置两个冗余的RIOM模块,对主控信号、司控器牵引制动指令信号、方向手柄信号等重要信号进行冗余采集。
2 TCMS设计功能分析
TCMS通过MVB总线和I/O接口与各子系统连接,传递控制、诊断和监视数据,完成各系统相应的控制、诊断和监视功能。
2.1 列车运行管理
2.1.1TCMS生命信号的传输
TCMS在周期为64 ms的时钟控制下,循环累加生成0~255范围内的数值,赋值给生命信号固定变量,发送给每个与TCMS有MVB接口设备。如果每个设备在定义的时间段内,收到的变量没有发生变化,则认为与TCMS通信中断。
TCMS在HMI上显示各个设备的生命信号信息,可直观的判断各设备与TCMS通信是否正常。
2.1.2列车参考速度
在信号CBTC-AM下,列车速度采用信号系统发送的速度,HMI显示速度值由信号发送。非信号模式下,列车速度来自于制动系统,6个车的每个BCU将给出4个轴的转速及每个车的参考转速及相应的转速有效信号发给CCU。相应的逻辑如下:
(1) 优先采用两个Tc车的参考转速。在同时有效情况下采用较大值;
(2) 如果两个Tc车都无效,取4个动车中,有效的最大值;
(3) 通过式(1),把选出的转速转化成车辆速度km/h。
v车辆=3.6πv转速D/Nc
(1)
其中:D为所选中车辆的轮径值;Nc为轮上齿数。
(4) 把计算结果赋值给变量进行传输,用于HMI上显示和发给车辆其他系统。
速度的计算要求轮径值和制动的转速数据,若该数据存在问题将直接影响速度是否正常,所以对数据的可靠性要求很高。
2.1.3牵引制动百分比信号传输
(1) 人工驾驶模式
TCMS通过两个RIOM冗余采集司控器的输出的电压信号,转化成牵引、制动级位指令,传递给牵引、制动系统,执行相关的牵引、制动控制。RIOM模块AI 采集司控器输出有效判断条件为:
①RIOM在线且 RIOM及AI模块均工作正常;
②司控器参考电压有效范围:(9.1±0.25) V;
③输出电压与参考电压比值有效范围:0.01~0.99,超过该范围将报“牵引制动百分比采集无效”故障;
司控器采用双电位计冗余输出,每个电位计有两路电压信号输出,TCMS分别计算两路输出电压与参考电压的比值,并通过图4中的对应关系及逻辑判断,得出牵引制动级位的百分比信号:
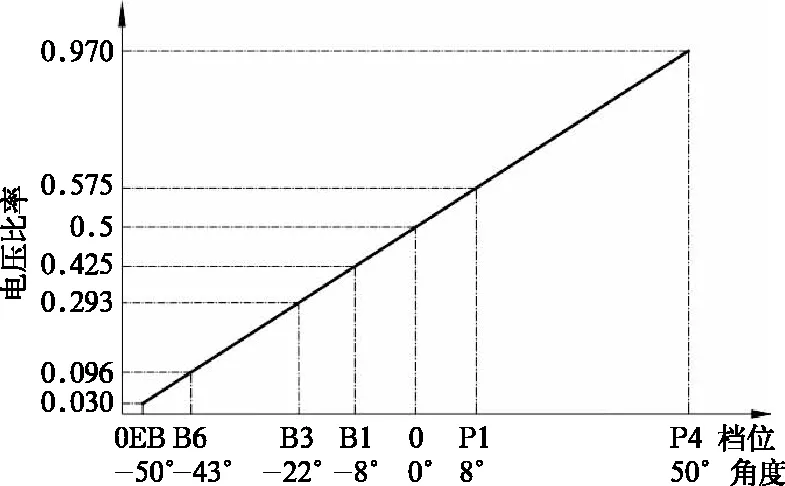
图4 输出电压/参考电压 与牵引制动级位对应图
当冗余RIOM的AI模块采集的|电压比率之差|≤0.06 时,认为两个RIOM 采集级位信号均有效,此时,牵引级位TCMS取两个级位信号的最小值;制动级位,TCMS取两个级位信号的最大值,即:牵引时采用最小牵引级位,制动时采用最大制动级位。
当冗余RIOM的AI模块采集的电压信号都有效,但|电压比率之差|>0.06时,判断逻辑:①判断RIOM1和RIOM2两路司控器输出是否有效;②如果两路司控器输出均有效,出于安全考虑,牵引工况下取牵引力较小值,制动工况下取制动力较大值;③如果一路无效则取另一路有效信号;④如果两路都无效,牵引工况下不输出牵引力,制动工况下输出最大常用制动。
(2) CBTC-AM自动驾驶模式
TCMS通过RIOM采集车载ATC输出的电流模拟信号,转化成牵引制动的百分比信号。传递给牵引、制动系统,执行相关的牵引、制动控制。
信号系统输出电流模拟量信号的范围为0~20 mA,当司机室激活时,且ATP没有切除时,TCMS按照图5的对应关系把模拟量的电流信号转换成牵引制动级位的百分比信号。
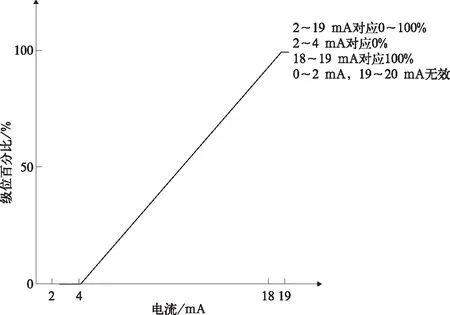
图5 ATC输出电流信号与牵引制动级位对比图
RIOM采集值与ATO输出模拟量信号换算关系如下:
ATO输出模拟量信号电流值=[(20/1023)×RIOM采集值]
TCMS系统接收车载ATC发送的牵引制动指令后,将指令量反馈给信号,如果输出与反馈误差大于5%,在MMI上提示司机退出ATO模式运行。如果司机5 s钟内不退出ATO模式,车载信号ATC会施加紧急制动。
对牵引制动百分比有效信号的判断,不仅考虑了正常和故障情况的有效范围,而且从列车运行安全导向方面采用牵引最小制动最大的合理方式。此种判断对外部输入电源的稳定性要求较高,如果外部输入与其他负载串联一路将会导致线路的不稳定,进而影响司控器的输出电压。3号线雨刮器与司控器负载未分开就存在这样的问题,已开始相关整改解决该问题。
2.1.4备用模式
为保证TCMS故障情况下,列车能够紧急牵引运行,列车设置了备用模式按钮,司机可以通过操作备用模式按钮来进入备用模式,备用模式下BCU、TCU通过接收牵引、制动命令硬线指令和级位编码硬线指令,实现牵引和制动的控制,并忽略TCMS的网络信号。
当满足下列条件之一时,位于司机台的TCMS系统正常指示灯熄灭,并且HMI提示司机应进入备用模式。
(1) 司机室激活端HMI通信故障;
(2) MVB通信中断;
(3) 激活端两个RIOM模块通讯故障;
(4) 非激活端两个RIOM模块通讯故障;
(5) 两端RIOM1模块通讯故障。
当出现下列情况之一时,即使司机台的TCMS系统正常指示灯没有熄灭,也建议司机主动进入备用模式。
(1) 激活端司机室HMI黑屏;
(2) 列车无法正常牵引。
现在1号线的设置方式为:只有TCMS网络出现故障的时候才可以启用该模式,若有其他故障需操作该模式时必须人为设置TCMS故障后,该模式才可用。与1、2号线不同的是,3号线在无TCMS故障时按下“备用模式”按钮,列车将进入别用模式,牵引制动不接受来自网络的指令只接受来自硬线的信号。3号线备用模式将不会受限,应急处置效率将会提升。
2.2 牵引系统
2.2.1限速管理
TCMS通过RIOM采集DI信号,来自显示屏的按钮信号,把相关的限速信息发给牵引系统,按照定义好的速度等级由牵引系统判断相关条件完成限速。并在HMI上显示相关的限速模式。
(1) 洗车模式
司机通过按压"洗车模式"按钮输出洗车模式命令,TCMS通过RIOM采集该指令后,转发给TCU执行。
(2) 自动限速
TCMS通过判断整车制动隔离、转向架切除的情况,把相应的自动限速模式给TCU,由TCU完成相应的限速控制。
切除2~3个转向架 限速60 km/h
切除4~5个转向架 限速50 km/h
切除6个转向架 限速40 km/h
(3) 人工限速
HMI“限速”界面,可以通过按钮实现两级人工限速,限速25 km/h和60 km/h。
制动切除后的限速管理是对列车运行的一项安全保障,3号线故障限速管理经过试验论证,安全性和可靠性均可保证。
2.2.2牵引系统测试
牵引系统测试包括低压测试和小功率测试,牵引系统判断测试条件成立后给出提示,在HMI上通过按钮触发测试,牵引系统自动进行测试,把测试结果反馈给TCMS,TCMS在显示屏上进行显示。
低压测试的目的是在列车静止,无高压,低压存在等测试条件成立的前提下,实现HSCB、充电接触器和线路接触器闭合和断开时序的检测。
小功率测试的目的是在列车静止,高低压存在等测试条件成立的前提下,实现HSCB、充电接触器、线路接触器、逆变器和制动电阻等相关牵引系统主要的部件是否正常工作。
2.3 制动系统
2.3.1保持制动施加、缓解
在人工驾驶模式下,有制动系统通过检测车辆速度及牵引制动指令线的状态自己判断进行施加,在ATO模式下,通过DI采集信号输出的保持制动施加指令线的状态转发给制动系统,由制动系统施加保持制动。
保持制动的缓解由TCMS控制。在洗车模式下,TCMS检测到车辆处于牵引状态一段时间时,缓解保持制动;当在非洗车模式下,TCMS检测到牵引力达到40 kN或者速度大于3 km/h时,缓解保持制动。
2.3.2空压机起停
TCMS根据主风管压力进行空压机启动控制,当两台空压机都能正常工作,且网络正常通信的情况下,控制原则如下:
(1) 总风压力的传感器位于两个Mp车上,用于检测总风压力,TCMS可以通过MVB网络在Mp1车和Mp2车通信端口获取BCU发送的总风压力数据。
(2) 空压机管理按照Tc1先启动,5 s后Tc2启动,同时停的原则控制。(空压机启动信号为持续的电平信号,高电平有效。)当总风压力小于800 kPa时,向两台空压机发送启动命令。当总风达到900 kPa 时,TCMS停止向空压机发送启动信号。
(3) 当其中一个主风管压力不可用时,采用另一个的主风管压力值,当两个主风管压力值都不可用时,TCMS不对空压机的启动进行控制。启动命令置0。
2.3.3制动测试
(1) 制动自检
在HMI显示屏“检修-制动测试”界面上,触发制动自检命令。自检准备好的条件有BCU判断,判断的相关的条件如下:
①停放制动缓解
②列车处于非紧急制动状态
③列车处于最大常用制动状态(要求司控手柄处于最大常用制动状态)
④车辆处于零速
⑤制动塞门未隔离
(2) 制动级位试验
施加停放制动后,在HMI的制动测试界面,触发制动级位测试开始请求给BCU,BCU切除保持制动,操作手柄进行逐级的制动。在每一级制动完成后,BCU将“BC实测值”和“BC计算值”发送给TCMS,由TCMS判断是否在标准内。(常用制动的压力标准为±20 kPa,紧急制动为±30 kPa)
TCMS系统还包含能耗里程数据累积、扩展供电、空调控制、自动报站、视频联动等等功能,在此就不详细介绍。
3 典型故障案例分析
3.1 案例1
2016年4月某日10306列太平园上行1车HMI花屏;司机重启HMI空开后故障未消除,跟车人员在红牌楼上车后回复:TCMS灯常亮,蜂鸣器未报警,HMI全屏花屏不能查看HMI信息,初步判断为HMI屏显示问题,不影响网络正常运行,随后列车限速60 km/h回段。故障现象如图6所示。

图6 HMI花屏
该故障为典型的显示屏屏显问题,HMI屏内核CPU正常运行、通信正常。通过TCMS状态指示灯正常显示可以清晰的判断整个TCMS网络的状态无异常,牵引制动等子系统的状态均正常。故障原因锁定在屏幕或屏幕与CPU主板之间的连接线上,后查出故障显示屏的线排接触不良导致。该故障在成都4号线曾出现2次,判断为批量问题,厂家批次屏全部返厂整改。
正线运营时出现该故障,可通过复位HMI显示屏断路器进行处置,若无法恢复,建议列车退出运营,司机操作备用模式后动车。
3.2 案例2
2016年5月某日,310列设备检查时发现Tc1车、Tc2车显示屏B路“报红”,2、5 车中继器指示灯状态异常。由于MVB网络为A、B两路互为冗余,故整车网络功能正常,不影响车辆正常运营。如图7所示。
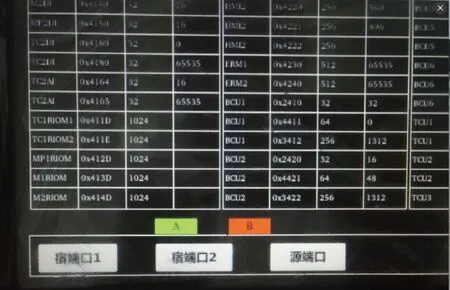
图7 MVB网络B通道显红
3.2.1故障排查
(1) 2016 年5月某日上车进行故障排查,发现两头司机室显示屏 B 通道“报红”,且故障状态稳定,表明显示屏检测到MVB总线B路异常。
(2) 2车和5车中继器状态异常。中继器指示灯G2(G2不亮表示MVB总线2帧错误) 熄灭,表明B通道有错误帧或帧碰撞。
(3) 将整车MVB分为3个网段(即中继器RPT设置前后区域Tc1MP1-M1-M2-MP2Tc2)进行检查,将故障定位到Tc2车,然后将Tc2尺设备依次接入网络,在接入VOBC设备时B通道显红,将其旁路后故障消除。
(4) 根据故障现象更换Tc2车VOBC的MVB板卡,更换后,B路状态恢复正常。
(5) 第2天列检时又发现B路状态异常,现象是B路“闪红”,观察中继器状态指示灯,状态正常。中继器指示灯通常可以反映大部分网络系统故障状态。对于中继器状态正常,但仍有网络不稳定现象的情况,需再进行深入排查。
(6) 用线缆分析仪对整车线路进行校对,未见异常。
(7) 通过软件对网络设备端口进行监视,发现:位于 2 车门控器前后 的设备(BCU、EDCU、GW)有丢包现象,通过逐个设备排查,最后旁路2车1号门控器后,所有设备通信恢复正常,B路状态恢复正常。因此,将2车1号门控器预防性更换。
3.2.2故障分析
(1) 经过两次故障排查,最终更换6车VOBC的MVB板卡和2车1号门控器设备后,B路状态恢复正常。
(2) 6车VOBC的MVB板卡存在问题导致B路异常,需信号厂家分析。
用线缆分析仪对更换下来的2车1号门控器进行阻抗测试,发现A、B路阻抗存在明显差异,A路阻抗为111欧姆,B路阻抗为126欧姆。
MVB线缆采用EMD介质,IEC 61375标准中规定EMD介质的特性组抗为(120±10%)Ω,阻抗有效范围是108~132 Ω,该门控器A、B路的阻抗值也在标准范围内,但正常情况下,A路和B路的阻抗值应该是比较接近的。
MVB 信号在线路传输的过程中如果遇到阻抗不连续或不匹配的点,会形成反射,反射后可能会对其他信号产生干扰,与正常信号叠加或产生碰撞,导致数据丢包。此类单个通道通讯异常的故障,对列车的正常运用无影响。
4 结束语
成都3号线列车TCMS系统采用了国内城轨列车普遍使用符合国际标准的MVB网络拓扑形式,功能实现以“设备导向安全”的理念进行设计,在调试及试运行过程中进行不断的完善修正,目前运行相对稳定可靠。