一种上下肢协调康复机器人的机构设计与分析
2018-11-13
(安徽食品药品检验研究院,安徽合肥230009)
0 引言
脑卒中已成为全球范围内导致死亡的第三大诱因,也是造成永久残障的主要因素[1-2]。康复治疗是降低患者致残率和提高生活质量的主要途径,然而有效的康复治疗是一个长期、强烈、频繁的过程[3-5]。传统治疗师与患者“一对一”的康复治疗方式存在劳动强度大、费用高、效率低、治疗效果难以客观评价等不足[6],借助康复机器人进行治疗成为解决这些问题的有效措施[7]。因此,康复机器人的研究目前已成为国内外机器人和康复医学领域的一个研究热点[8-9]。已有很多学者对康复机器人进行了深入研究并取得了一定成果,但目前康复机器人的研究主要聚焦于上肢、下肢或某一关节康复领域[10-11]。
2004年,Helen J.Huang等[12]对人类上下肢神经耦合系统的研究发现,人体上下肢的运动神经相互作用,相互影响,上肢的积极康复运动有利于下肢失能者下肢运动功能的恢复[13-15]。因此,从康复医学的角度来看,上下肢协同运动或四肢协调运动康复训练在偏瘫患者的康复过程中是极其重要的,研发一种能够实现四肢联动的康复训练设备对偏瘫患者的康复治疗具有积极的现实意义。故研制一种能够适用于早、中、晚不同康复期的偏瘫患者,主被动相结合的肢体协同训练康复机器人是一项具有一定现实意义和研究深度的课题。
本文基于坐姿上下肢康复训练轨迹实验探索结果,确定简单可靠、杆件尺寸可变的康复机器人方案,然后利用MATLAB软件对康复机器人机构进行优化与仿真,并制作样机进行实验验证。
1 坐姿康复训练机器人方案
1.1 人体下肢模型建立与坐姿训练规律探索
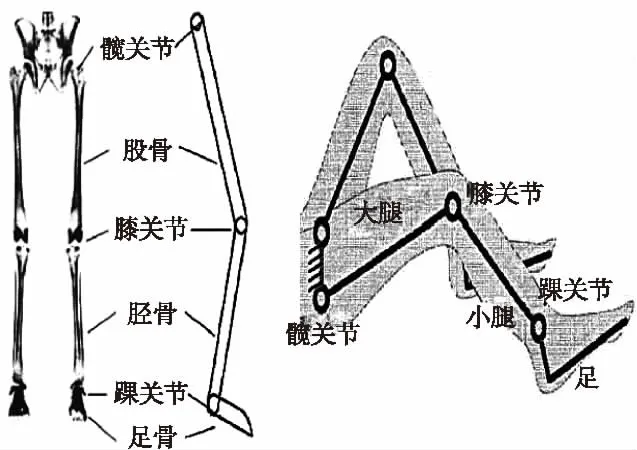
图1 人体下肢的刚体模型
根据人体生理解剖可知[16-17],下肢骨的长度和形状在运动过程中保持不变,可将下肢骨简化为刚体,关节简化为刚性的机械铰。因此,下肢可看作由髋关节、膝关节和踝关节将大腿、小腿和足连接起来的开式运动链。如图1。
肢体失能者在康复初期,由于重力等作用难以独立依靠自身肌肉力量进行肢体运动,因此需要进行减重被动训练;在康复中期患者具有一定的肌力,但仍难以进行独立活动,因此,康复机器人也需要进行减重训练。本文拟采用患者坐姿状态来进行康复训练试验准备。
图2为选取某一身高175 cm的男同学训练过程截图处理所得到的上下肢主要关节运动轨迹图。

图2 试验得到的轨迹
通过对图2分析可知,试验者的踝、腕关节运动轨迹趋势大致形状为图上所示的不同倾角类椭圆状。不同身高患者依旧存在空间上的差异,故需要设计一种可满足不同身高使用者的可调节训练器械。
1.2 坐姿康复训练机器人方案确定
通过上述试验与分析,可知康复机器人需要满足:
1)在坐姿状态下,患者的上下肢训练时需要与正常步态行走时的同步及异步协调规律相一致;
2)坐姿训练时,人体踝关节的运动轨迹呈类椭圆状,而腕关节的运动轨迹呈圆弧状摆动;
3)人体肢体关节活动度均需要满足人体正常活动时的关节活动度的活动范围。
为了满足上述条件,设计一种具有简单、实用、经济、安全等优点的康复训练机构来满足所需训练轨迹要求。
因为平面连杆机构具有运动副单位面积压力较小、经济、易于加工制造和保养等优点。故文章机器人的训练机构选择为平面连杆机构,并且机器人的左右两侧带动两侧肢体协调康复训练安装此机构,两侧肢体的同异步康复训练实现可通过设置康复训练机构曲柄的初始相位差达到。
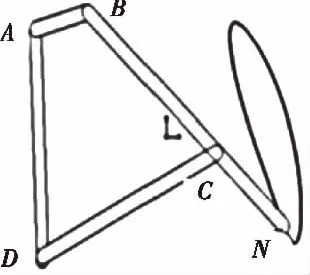
图3 四杆机构模型
因此上下肢运动时存在一定的协调关系。在本文中,先设计一种能够产生类椭圆的康复训练机构。根据连杆相关原理及查阅相关参考书可知,在平面铰四杆机构ABCD中,选取如图3所示AB为曲柄、AD为机架的四杆机构,杆长满足AB∶BC∶CD∶DA=1∶3∶3.5∶3要求时,连杆上的N点则输出类椭圆状轨迹。在此杆长下,在BC连杆上选取不同点,则输出不同的类椭圆,这种类椭圆形状与试验得到的踝关节形状类似,因此能够满足设计要求。患者的不同身高,对所需训练轨迹的位置和幅度也不同,因此存在差异。固定杆长的四杆机构虽能实现类椭圆轨迹,但运动轨迹也是固定的,只能适应某一身高、腿长的使用患者,不具有普用性,缺乏个体差异性。而本文所设计的康复机器人满足150 cm~185 cm身高使用者,因此,固定杆长的四杆机构难以满足患者的要求。

图4 五杆变胞机构设置方案
本文在四杆机构的基础上,添加一个自由度,组成一种五杆变胞机构。根据平面机构自由度计算公式,五杆机构的自由度为2,如图4,将此机构在矢状面内对称布置在座椅两侧。该机构能够通过设置不同的参数在一定运动范围内能够实现任意轨迹;另外该机构不仅刚性好,运动误差小,柔顺性好,同时满足康复训练机构的安全性、经济性要求。通过调整辅助杆MN与水平夹角可以得到不同类椭圆状轨迹,符合设计目标。
在对上肢进行训练时,要求腕关节的运动轨迹为圆弧状,同时要求上、下肢进行规律的协调运动,故该机器人训练机构要求能够实现患者上下肢的联动。在四杆机构中,曲柄连杆的摇杆运动轨迹是圆弧状的。如果在下肢五杆机构的基础上再添加一套实现上下肢协调运动的曲柄摇杆机构作为上肢康复训练机构,无论是机械结构、控制系统,还是安全性和经济性,都大大增加了该康复机器人本身及操作的复杂性,而且成本显著提高,不利于康复训练机器人的推广。因此,本文基于下肢五杆变动机构基础,提出了增加一种具有零自由度的II级杆组作为上肢训练机构的设计方案,如图5。该设计方案不仅机构结构简单、易于控制,且安全性、经济性好。
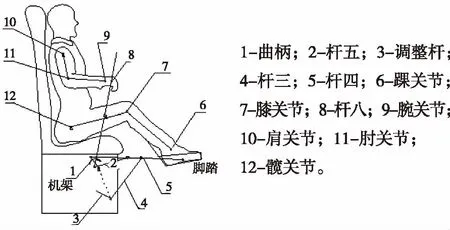
图5 康复训练机构方案图
1.2.1 执行机构方案设计
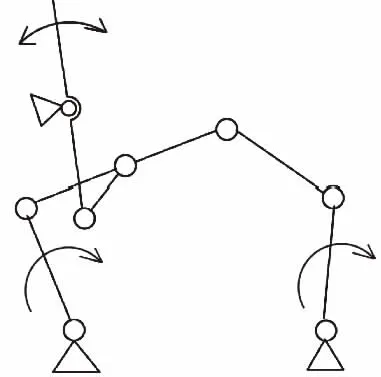
图6 执行机构
本机构能实现平面内任意轨迹的运动,主要为椭圆轨迹,即模拟人的真实步态,完成各关节运动幅度要求。在运动的同时,可根据不同人身体尺寸以及康复需要精准调节轨迹。
方案如图6,为五杆机构加摆动机构。摆动机构使上肢各个关节在手部摆动的作用下进行相应的锻炼,上肢锻炼也为杆件,体积较小也便于装配。
1.2.2 机构参数的确定
本文采用解析法对康复机构的尺寸进行计算。为避免偏瘫患者康复过程中形成异常步态,机器人运动轨迹须与正常步态下踝关节运动轨迹相一致。本文选择身高180 cm患者步态轨迹作为实现最大步态边界条件,采用再现轨迹优化算法计算训练机构的尺寸。

图7 康复机器人结构示意图
根据机构运动学原理,建立坐标系如图7所示,某时刻脚踏M点坐标(xm,ym),并联机构ABCDE的各杆件长为l1、l2、l3、l4、l5,曲柄轴心A点坐标(0,0),设逆时针旋转角度为正,曲柄转角θ1、机架安装倾角θ0、连杆倾角α、调整杆旋转角度θ4。将具有零自由度的II级上肢杆组拆去,假设调整杆l4长度为零,则五杆机构转化为四杆机构(图8)。
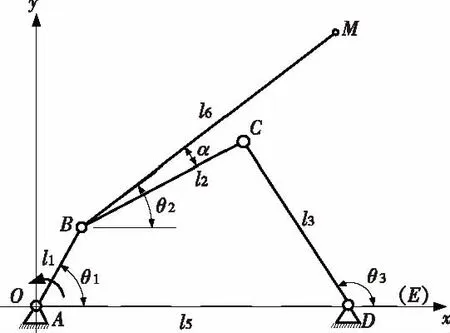
图8 机器人主四杆机构示意图
在图8的坐标系中,可知:
(1)
为了使连杆上的轨迹点能够适应训练轨迹的要求,设连杆曲线上的第i个坐标点M(Mxi,Myi)与给定曲线上的第i点(xi,yi)的差值之和最小,则设计优化的目标函数为:
(2)
以f(x)最小值为优化目标函数,使用Matlab计算软件中的惩罚函数法对杆件尺寸进行优化求解。
由杆长条件可知,约束条件为:
1)杆长需要均为非负数,即:
g1(x):min[l1,l2,l3,l5,l6]≥0
2)根据曲柄摇杆机构的杆长要求:
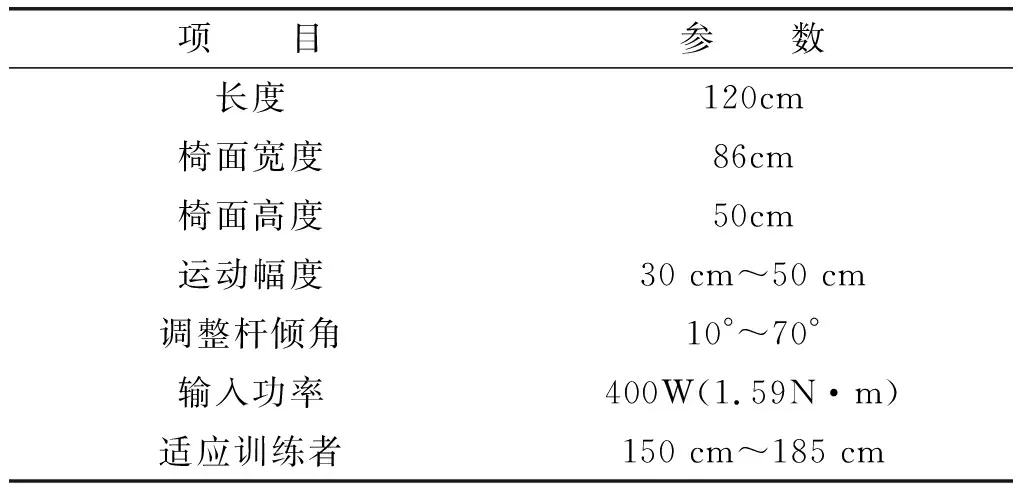
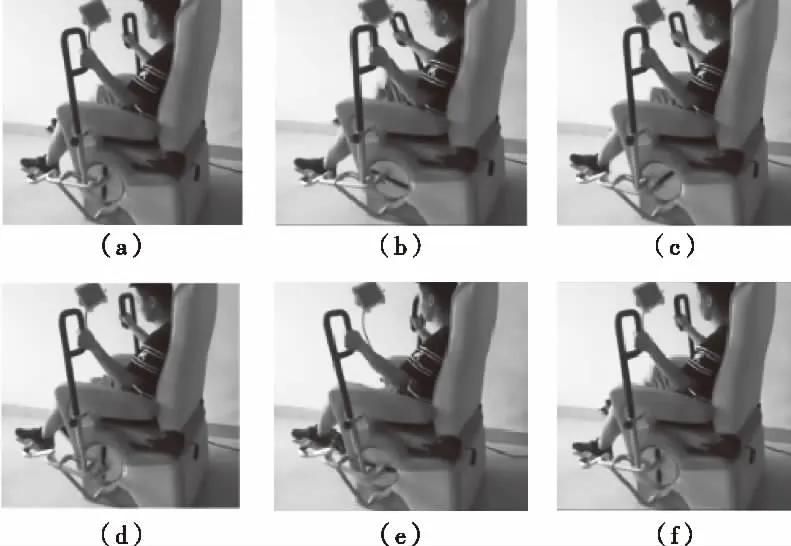
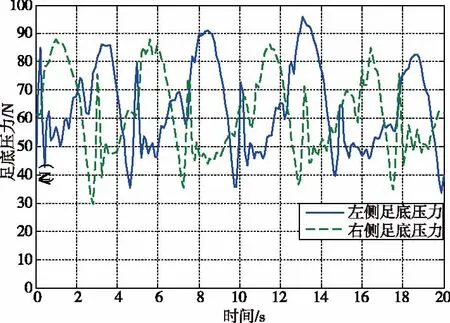
g2(x):l1 (3) g3(x):l1+2max[l2,l3,l5] (4) 3) 为了保证机构良好的传动性,选取最大压力角为30°,即: (5) 选择175 cm身高的试验者训练轨迹作为优化目标进行尺寸优化,利用Matlab软件中的Fmincon函数进行优化计算,其结果如下: 图9 七杆机构两种结构的 三维模型图 l1=85 mm,l2=315 mm,l3=300 mm,l4=350 mm,l5=240 mm,l6=200 mm,α=0° 当肢体参数确定后,利用三维造型软件PRO/E对训练机构进行三维建模,其模型图如图9。 图10 康复训练机器人样机 本机器人基于坐姿训练方式,主要由机器人本体机架、软椅面、可调整角度靠面、上下肢康复训练机构、可调整脚踏、人机交互系统、脚部和手部辅助系统等组成,样机如图10所示。软椅面与变形滑块连接,机架上设有相应的滑动导轨,软椅面允许在一定范围内调节俯仰角度,相应的康复训练机构对称布置在软椅两侧。样机曲柄由圆盘机构实现,通过改变曲柄长度来改变康复训练规划训练轨迹。通过改变调整杆的倾角改变上下肢不同肌肉部位。机器人的性能参数如表1所示。 机器人主要结构参数以及系统性能参数如表1所示,被试者身高范围是150 cm~185 cm,体重200 kg以下。在实验开始的准备阶段,根据上章提到的机构调整方法调整康复训练机构的具体工作位置,按照合理的科学训练姿态开始康复训练,同时患者可根据自身情况调整合适的训练步长和训练速度。 表1康复机器人结构参数及性能指标 为了验证康复训练机构能够顺利地实现患者上下肢的协调训练,实验选用身高为170 cm,体重为65 kg的健康男性青年作为被试者,杆与水平面的夹角调整为30°,实验通过数据采集系统来收集具体的实验数据。在整个实验过程中,患者完全处于被动的康复训练状态,手腕和脚部分别约束于训练机构的手柄、脚踏处。图11是整个训练过程。 图11 不同时刻的康复训练 整个训练过程是连续、平稳的,被试者感觉非常舒适。由图11可以看出被试者在左右腿交替摆动的同时,上下肢也一起进行相应的协调运动,这验证了上述坐姿康复机器人能够实现患者的上下肢协调运动训练。 从图12中,可以看出在被动训练模式下试验者在6 r/min速度下的平均肩、膝关节角度变化规律;图13为主动训练模式下,试验者在阻力4级下,左右脚足底压力的变化规律。图14为主动训练模式下,试验者在阻力1、4、9、12、18、20级下,右侧足底压力的变化规律。 图12 被动模式膝、肩关节活动度 图13 主动训练模式双足足底压力 图14 不同主动阻力训练右侧足底压力变化 整个训练过程运行连续、柔顺。在主动训练时,根据试验者的需要,调节伺服电机输出不同的阻力,受试者克服阻力运动,试验过程中肢体可连续实现上下肢体协调运动,锻炼相应的肌力。从图12、13、14中的相应曲线可知,在主动训练状态下,平均肩、膝关节角度变化也表现为周期性协调变化规律,曲线为正弦函数曲线,平均足底压力运动曲线呈现周期性规律波动。实验验证了肩、膝关节和足底压力周期性协调变化符合上述的运动规律。 在脚踏点位置、手柄位置点放置记号笔,并在侧面附一张坐标纸,以测量实验过程中机构末端实际的运动轨迹。当康复机器人运行后,笔就会在坐标纸上绘出机构末端轨迹(图15)。从图15可看出,机器人的实际运行轨迹呈类椭圆状,且运动趋势与行走时踝关节运动趋势类似,接近踝关节运动轨迹。 图15 实际运行轨迹 在实验验证过程中,通过改变曲柄位置,以及调整杆与水平面的夹角,最终可得到机构脚踏点的运行轨迹,实验过程如下。 1)30 cm规划轨迹 将康复机器人训练机构的曲柄长度设置为75 mm,调整杆倾斜角设置为60°。在被动训练模式下运行康复机器人,如图16。 图16 幅度为30 cm的实验 2)40 cm规划轨迹 将康复机器人训练机构的曲柄长度设置为85 mm,调整杆倾斜角设置为30°。如图17。 图17 幅度为40 cm实验 3)50 cm规划轨迹 将康复机器人训练机构的曲柄长度设置为95 mm,调整杆倾斜角设置为20°。如图18。 图18 幅度为500 mm的实验 由于加工制造等原因与仿真规划步长存在微小的误差,实验得出的实际轨迹分别为291 mm,401 mm,492 mm。实验较好地证明了上述康复机器人可以实现规划步长的训练要求。 1)设计了一种可实现上下肢协调训练的康复机器人,能够为患者提供主被动康复训练。同时该机构具有结构紧凑、经济实用、使用方便的优点; 2)为探索下肢的康复训练轨迹规律,对人体下肢进行简化,建立人机模型,并进行相关实验,为康复机器人设计方案提供了理论基础; 3)采用解析法对康复机构的尺寸进行计算,对杆件尺寸进行优化计算后确定各杆件尺寸参数。为样机的实现奠定了基础。 4)基于本文样机进行了试验验证,试验结果表明该机器人能够针对不同患者实现上下肢协调康复训练,能够满足患者的康复需求。
2 样机设计与试验

2.1 上下肢肢体协调运动

2.2 不同规划步长训练功能实验

3 结论
