地磁传感器标定方法研究及数值模拟*
2018-11-13王良明
方 旭,王良明
(南京理工大学能源与动力工程学院,南京 210094)
0 引言
地磁测姿是根据地磁矢量的坐标转换关系而得到的。在明确了发射坐标系地磁场的矢量分布后,再由炮弹中的地磁传感器进行地磁探测,获得地磁矢量在弹体坐标系上的分量,然后根据坐标转换关系解算姿态角。地磁传感器作为地磁测姿过程中的核心敏感器件,其测量精度很大程度决定了测量姿态角的准确性。由于地磁传感器在实际测量过程中,受弹体本身磁体干扰、环境温度、安装误差等影响,常常会出现误差,从而影响姿态角的解算精度。因此,提高地磁传感器的测量精度是测姿的关键因素。文中采用多位置法与最小二乘法相结合的方法对地磁传感器进行标定,并用此方法通过对某155 mm榴弹的地磁传感器进行标定实验,从而验证其可行性。
1 地磁传感器误差源分析
由于地磁传感器在制造过程中,本身存在制造误差,并且环境温度、安装误差等因素,不可避免的会产生测量误差。根据产生误差机理的不同,可将地磁传感器的主要误差分为3类:弹体对磁传感器的磁影响、测量误差、安装工艺误差,安装工艺误差又分为非正交误差、零位漂移误差和灵敏度误差。
1.1 弹体对磁传感器的磁影响
地磁传感器利用磁场工作,而弹体也是由铁磁性材料制成,它在地磁场的作用下会产生磁性,反过来对其周围工作的磁传感器产生影响。当外部不存在磁场时,整个磁体不表现出磁性,但是当有磁场作用在磁体上时,在磁体的两个端面出现磁荷,表现出磁性,这种磁场称之为退磁场。当弹体在地磁场中飞行时,会产生这种退磁场,对传感器测量产生一定影响。
1.2 非正交误差
地磁传感器通常由3个两两正交的轴组成,而在制造过程中,并不一定能保证三轴两两完全正交,因此在测量时会产生误差,这种误差即为非正交误差,其非正交模型如图1所示。
图1中,X0、Y0、Z0表示理想正交模型中地磁传感器3个轴的矢量指向,X、Y、Z表示实际地磁传感器三轴的指向。假设Z0轴与Z轴重合,由此可以得出地磁传感器三轴不正交角的数学模型为
(1)
式中α、β、γ为地磁传感器三轴间的非正交误差角。
1.3 零位误差
传感器在实际使用过程中,在零磁条件下,模拟电路和A/D转换的零点不为零,使得输入为零,传感器输出不为零,由此产生的误差即为零位误差。
1.4 灵敏度误差
灵敏度误差是由于地磁传感器各轴间的灵敏度不同、测量信号的电路特性不完全相同而引起的测量误差,其数学模型为
(2)
式中:X2、Y2、Z2为存在灵敏度误差、非正交误差情况下的三维磁场强度;X1、Y1、Z1为存在不正交误差情况下的三维磁场强度;kx、ky、kz为地磁传感器灵敏度。
因此,在测量之前,应对地磁传感器的上述误差进行误差补偿,才能保证传感器的测量准确性。
2 地磁传感器标定原理
2.1 地磁标准值计算
计算地磁标准值的方法是基于国际地磁学和高空物理协会(I.A.G.A)给出的最新国际地磁参考场(IGRF12)。已知实验地的经纬度以及海拔,通过IGRF的计算方法得出实验地的地磁强度为49 808.7 nT,磁偏角为-5°39′,磁倾角为48°65′。
2.2 标定方法
通过在实验地测得的地磁标准值和测量值,建立地磁传感器的标定方程,方程形式为
(3)
将式(3)变形为
(4)
由于需要在3种姿态下进行测量,对式(4)进行变形得
(5)
(6)
(7)
由此,得出6个标定系数,然后需检验标定系数是否正确,改写式(3)得
(8)
3 地磁传感器标定实验设计及实验结果分析
3.1 标定实验设计
在实验场地,首先使用寻北仪,找出磁北方位,当寻北仪表盘数字显示器显示为360°±0.2°(接近360°),即可认定为磁北方向。
将地磁标定试验台放置在磁北方向,保证实验平台始终对准磁北方向,然后用水平仪调整实验平台至水平。实验标定平台如图2所示。
校准完毕后,将某155 mm榴弹架在实验架上,连接实验台与计算机,即可采集数据。



为保证实验精度,应进行多次实验,将所记录的数据,按照实验原理中所介绍的标定方法进行计算,得到标定系数a11,a12,a21,a22,b1,b2,从而得到修正后的标定方程,将其编入程序,并录入地磁传感器中。
使用标定后的地磁传感器,再次进行数据测量,测量所得结果是修正标定后的,将其与标准地磁数据进行对比,判断测量结果是否得到修正,从而判断标定系数是否正确。
3.2 标定实验结果分析
按照上述设计进行实验,得到数据经过误差补偿计算以及坐标投影之后,得到测量地磁场的水平分量(x轴)和垂直分量(y轴),并通过Matlab对所有采集的数据进行处理分析,得到传感器在不同3个方向下,标定后的地磁强度。仿真结果如图4,图5,图6所示。
图4中,当弹体在磁北方向与水平呈41.35°时,地磁场强度的x轴方向分量为0,y轴方向分量随弹体的转动呈现波动变化,且在地磁方向上取得最大值,在地磁反向取得最小值。
图5中,当弹体在磁北方向与水平呈-48.65°时,弹体与地磁方向重合,y轴方向分量始终为零,x轴方向分量保持一个定值。
图6中,当弹体在磁南方向与水平呈48.65°时,y轴方向分量始终为零,x轴方向分量保持一个定值。
由上述3个图分析,标定后的地磁强度与实际测量的结果相比,虽略有波动,但结果基本相似,满足实验预计要求。
为了更进一步验证标定结果的准确性,文中在每个方向选择3组数据进行分析。通过对比计算得出的标准地磁强度与测量得出的标定后地磁强度,验证实验是否达到预期要求。其中,实际地磁强度根据IGRF12计算结果为49 808.7nT。
当弹体在磁北方向与水平呈41.35°时,选取y轴分量在最大值时的数据,通过测得的x轴分量与y轴分量计算得出标定后的地磁强度,与标准地磁强度的对比结果如表1所示。

表1 磁北向41.35°标定后的地磁强度
当弹体在磁北方向与水平呈-48.65°时,由于x轴分量和y轴分量均为定值,任意选取某一时刻的数据,计算得出标定后的地磁强度与标准地磁强度的对比结果如表2所示。
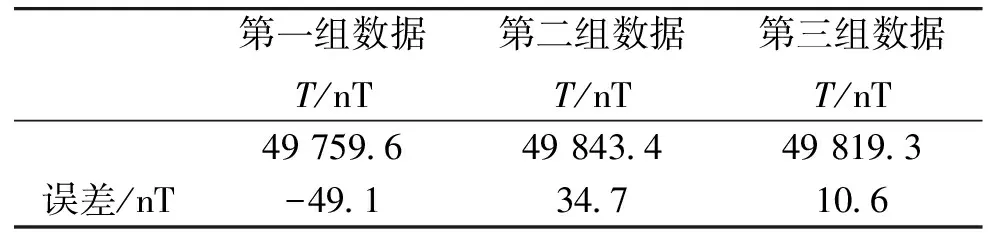
表2 磁北向-48.65°标定后的地磁强度
同理,磁南向48.65°的标定结果与标准值对比结果如表3所示。

表3 磁南向48.65°标定后的地磁强度
从上述3个表的数据分析得出,3个位置地磁强度标定后结果的最大误差均控制在50 nT以内。
4 结论
文中主要对地磁传感器进行标定,首先分析了地磁传感器的主要误差来源,然后提出了一种比较方便快捷的标定方法。通过实验验证,文中采用的多位置法与最小二乘法相结合的方法对地磁传感器的标定是有效可行的,且获得了较高的精度,可以有效的为弹箭姿态确定提供较为精确的校正数据。