基于二流理论的自动化集装箱码头集疏运路网布置评价方法研究
2018-11-01管政霖梁孝诚辛永宝
管政霖 周 强 梁孝诚 辛永宝
(武汉理工大学物流工程学院 武汉 430063)
0 引 言
全自动集装箱码头堆场箱区一般采取垂直岸线布置,堆场与码头前沿装卸船车辆及后方集疏运车辆之间的交接作业在箱区两端进行,集装箱垂直岸线摆放在堆场箱位上[1].这种堆场布置方式使得码头所有的集疏运车辆都在堆场陆侧后方的一条行车道上行驶,装卸箱的作业区或装卸道紧靠行车道,集疏运卡车在临近目标箱区时要减速停车去完成装卸集装箱的任务,车辆之间相互影响、相互干扰,其道路的通行质量对集装箱码头的作业效率有着重要的影响,一直是港口规划设计者和运营管理者最关心的工程技术问题之一.韩保爽等[2]参考国外进港闸口布置形式,提出多级闸口布置新模式对进港外集卡进行分流,缓解集疏运交通压力;刘广红等[3-4]则借鉴城市单向交通理念,对集疏运交通组织进行设计,使港内形成交通循环,优化交通条件.但目前对自动化集装箱码头集疏运路网的研究仍较少且都是从交通组织的角度,针对路网本身性能的分析仍处于空白.
基于交通工程的二流理论,文中分析了全自动集装箱码头路网形态对集疏运交通服务质量的影响,建立了基于二流理论的码头陆域集疏运交通流模型,提出了一种箱区垂直布置的自动化集装箱码头集疏运路网布置评价方法,通过系统仿真初步获得了相关参数.
1 自动化集装箱码头陆域集疏运交接的两种工艺
1.1 集疏运卡车倒车式交接工艺
图1为倒车式交接工艺及平面布置,堆场末端布置有倒车装卸区,集卡倒车后,集装箱自然形成为堆场集装箱摆放方向[5].
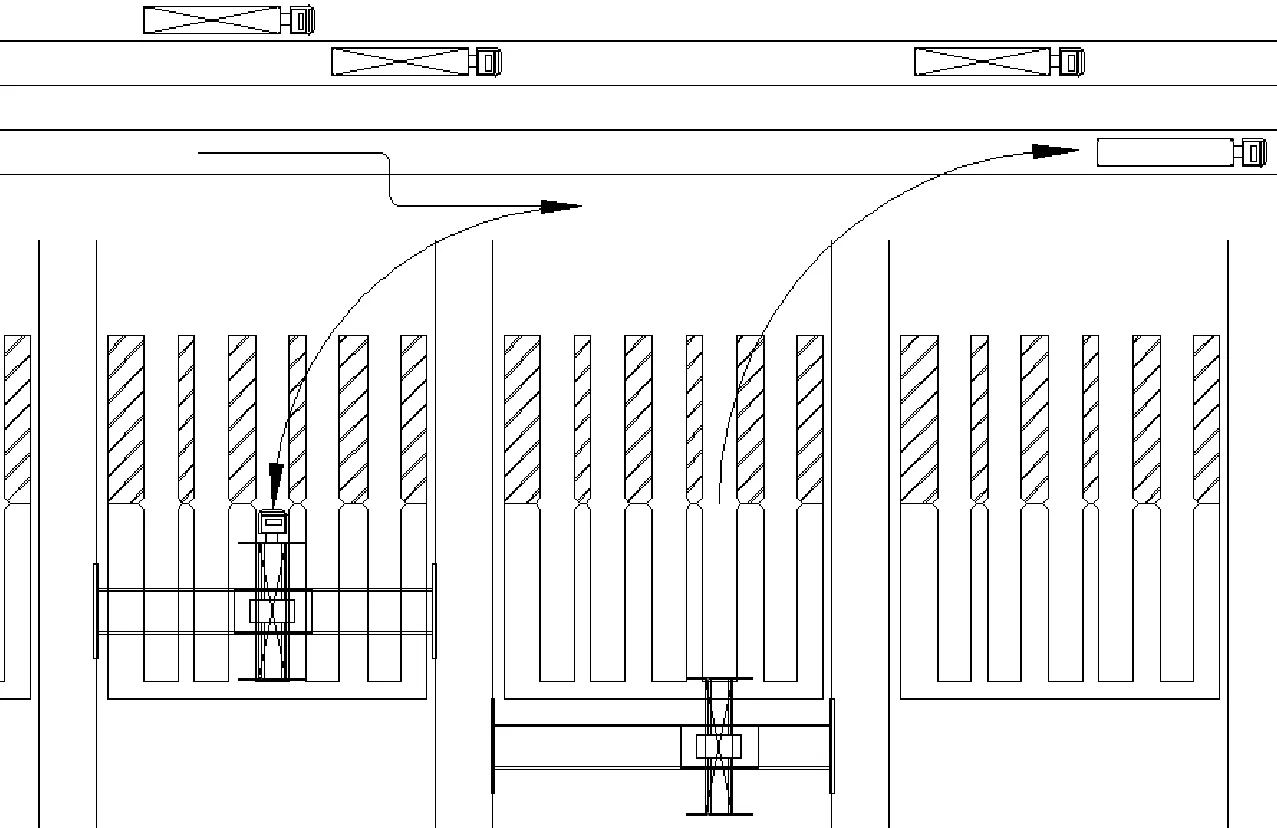
图1 倒车式交接工艺与平面布置
工艺过程为:集疏运卡车行驶到目标箱区,然后倒车进入装卸交接区,交接装卸完成后,卡车驶入行车道离开.由于该工艺需要增设倒车区,故占用码头面积较大.当然,车的驶入驶出行车道也会影响行车道车流.优点是单独设立的倒车装卸区减小了车辆装卸对行车道的影响,且装卸设备不需再把集装箱旋转90°.
1.2 集疏运卡车顺靠式交接工艺
图2为顺靠式交接工艺及平面布置,交接装卸道紧靠行车道.工艺过程为:集疏运卡车行驶到目标箱区交接装卸道,交接装卸完成后,卡车驶入行车道离开.由于集装箱的位置方向与堆场箱区方向不一致,交接起重机需要将集装箱旋转90°才能进入堆场.显然,由于交接装卸道紧靠行车道,卡车的驶入驶出行车道需要减速、加速、变道和修正车头方向,影响行车道车流.如果堆场垂直箱区宽度过窄,还会影响相邻箱区的集疏运卡车进入装卸道.
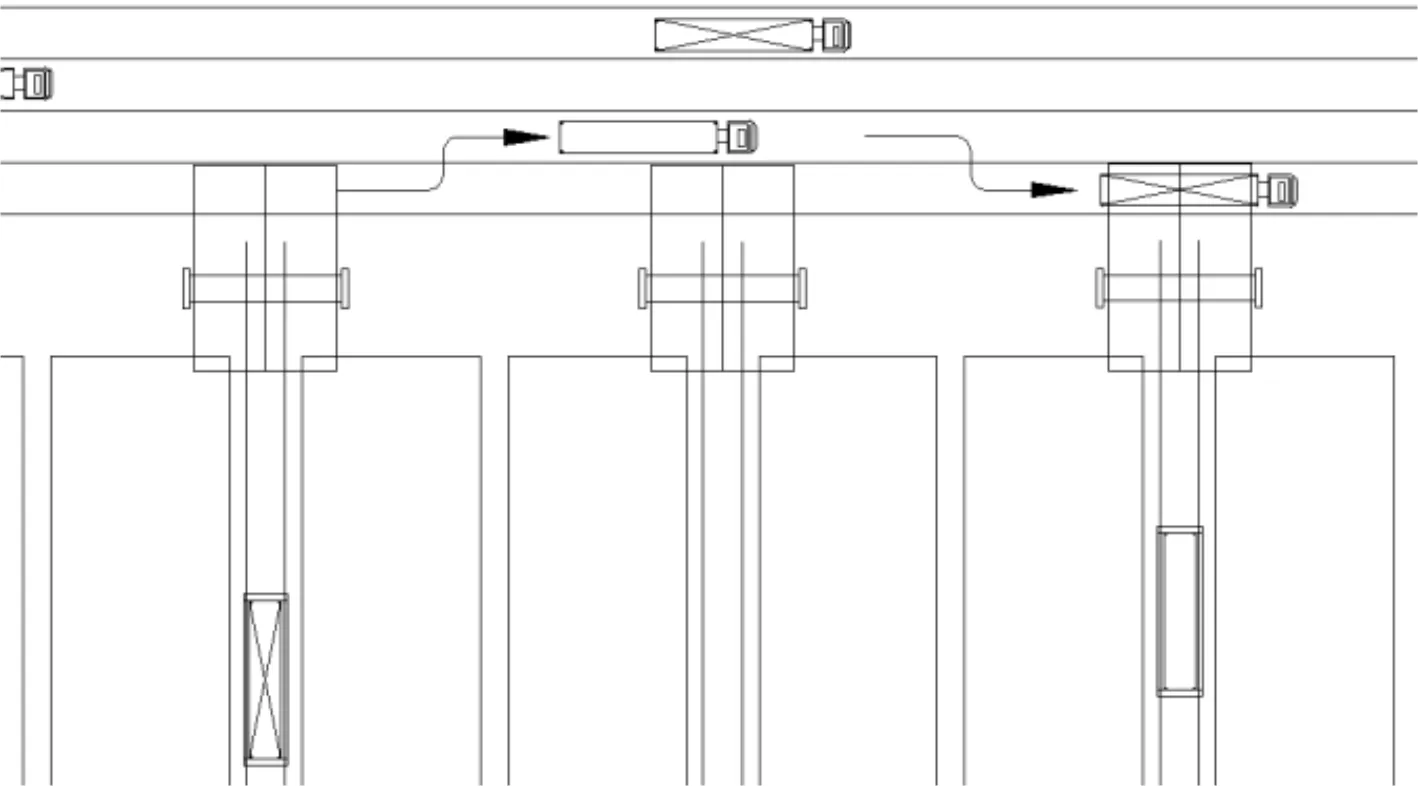
图2 顺靠式交接工艺与平面布置
以上两种交接工艺都会影响集疏运道路通行质量,影响程度需要进行深入分析,才能确定最佳的行车道数量,设计合理的平面布置.
2 自动化集装箱码头陆域集疏运路网交通服务质量评价方法
2.1 基于二流理论的码头集疏运交通流模型
二流理论将交通流中的车辆分为运行和停止两类,后者包括临时装卸货、临时上下客、红绿灯、交通拥堵等.对于自动化集装箱码头陆域集疏运交通流系统,行车道上的集疏运车流中既有处于行驶状态的车辆,又有减速停车等待装卸的车辆.
基于二流理论,针对自动化集装箱码头陆域集疏运作业交通流特点,做出以下假设:集疏运卡车平均行驶速度vr与路网中处于行驶状态的车辆所占比重fr成比例.
由假设可得:
(1)
式中:Vm为路网中集疏运车辆平均最大运行速度(集疏运时,Vm一般为0.50~0.58 km/min);n为集疏运交通服务质量参数.
平均速度V可以定义为Vrfr,于是
(2)
式(2)的边界条件为当fr=1 时,V=Vm;当fr=0时,V=0.
设Tr为每单位距离的外集卡道路行驶时间.
(3)
则外集卡码头内的滞留时间T为
T=Tr+Ts
(4)
将式(3)代入式(4),得
(5)
外集卡在码头内的滞留时间决定码头集疏运效率.通过以上推算,影响自动化集装箱码头集疏运效率的因素主要有集疏运路网性能和外卡等待装卸的停止时间.对于自动化集装箱码头集疏运系统,行车道上车辆平均最大运行速度Vm为定值,故路网性能可以通过集疏运路网交通服务质量参数n来评价,n值越小,随着fr的减小,Tr的增长越缓慢,即交通流量的增大对路网环境的影响越小.n值决定集装箱码头路网对集疏运高峰期作业的承受能力.而外集卡等待装卸的停止时间Ts则取决于堆场装卸设备的工作效率和码头生产组织策略.
2.2 集疏运路网交通服务质量评价方法
为探究码头集疏运路网形态与集疏运路网交通服务质量参数之间的关系,建立集疏运交通质量评价公式,拟参考城市交通两相流理论中关系模型,根据场桥与集疏运卡车的交接工艺、堆场箱区平面布置尺寸、场桥装卸效率和行车道数量等码头集疏运路网形态参数,建立如下模型.
n=k0+k1X1+k2X2+k3X3
(6)
式中:k0取决于自动化集装箱码头堆场陆侧交接工艺;X1为箱区宽度,m;X2为场桥工作循环时间,min;X3为行车道数量,条;k1,k2,k3值为回归系数.
由于实际情况下,码头集疏运交通流相关参数的获取比较复杂,本文拟采用仿真建模的方法采集数据分析计算,验证评价方法.
3 自动化集装箱码头陆域集疏运系统仿真模型
3.1 集疏运装卸工艺的概念模型
Petri网能够对具有并发性、异步新、分布式、非确定性系统进行有力描述[6],由于箱区垂直布置的自动化集装箱码头集疏运系统具有以上特点,因此可用Petri网理论描述集疏运系统的作业流程.集箱子系统层的对象模型见图3.
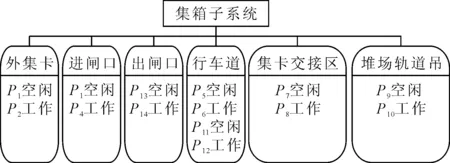
图3 集箱子系统层对象模型
根据集箱子系统层的对象模型,其动态模型见图4.
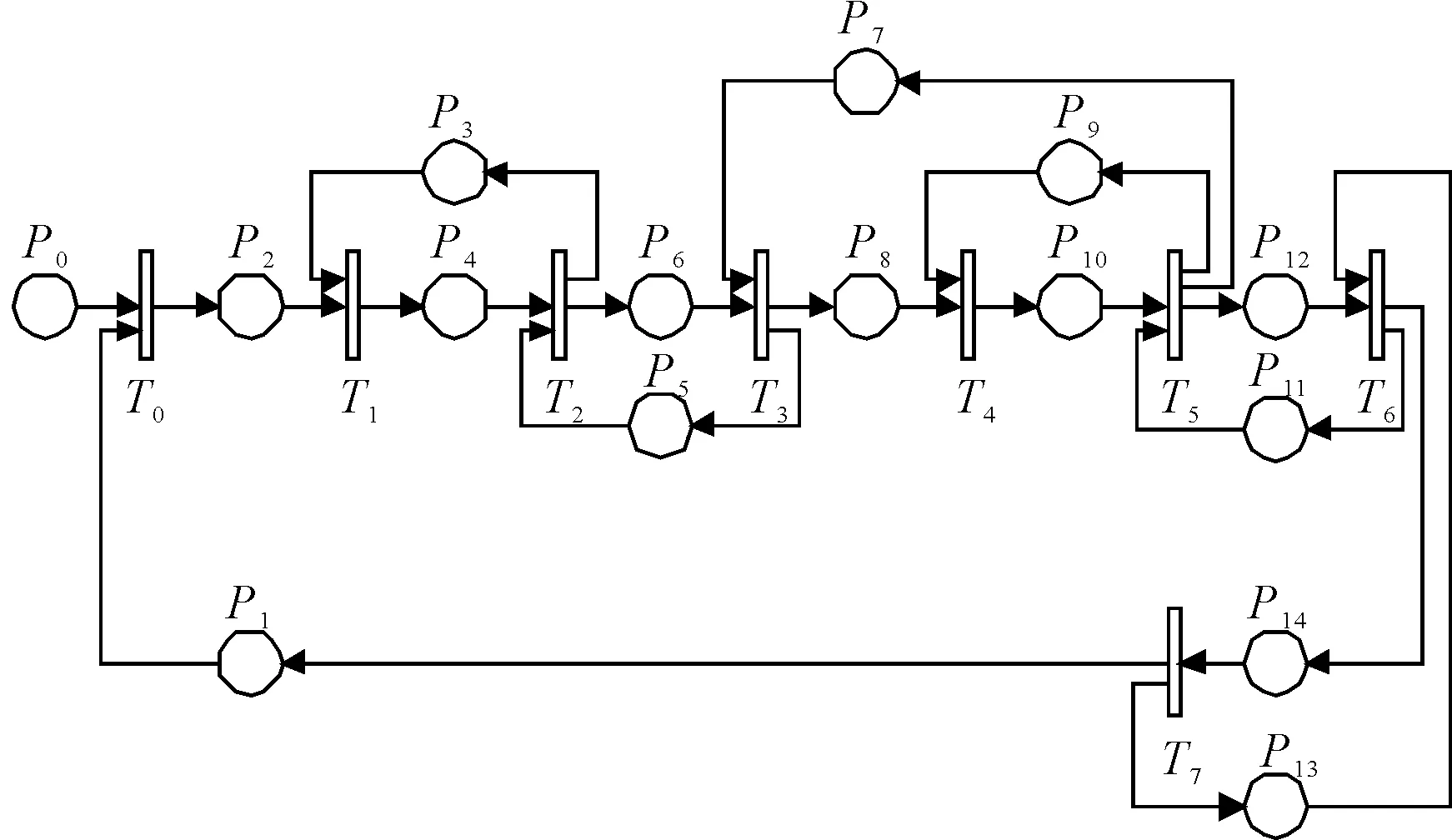
图4 集箱子系统层动态模型
3.2 集疏运道路交通模型
3.2.1集疏运道路的路段模型
自动化集装箱码头堆场的布置与传统码头有很大的不同,垂直岸线布置的堆场将码头前沿装卸车辆与后方集疏运车流自然分离,使得所有集疏运车辆均在场陆侧后方的一条主干道上行驶.特种箱堆场一般布置在自动化堆场后方,其装卸车道与集疏运主干道形成交叉,将其分为多个路段.为优化集疏运交通条件、简化港内交通组织,自动化集装箱码头的车道一般为单向车道,使港内形成交通循环[7].自动化集装箱码头集疏运主干道道路路段简图见图5.
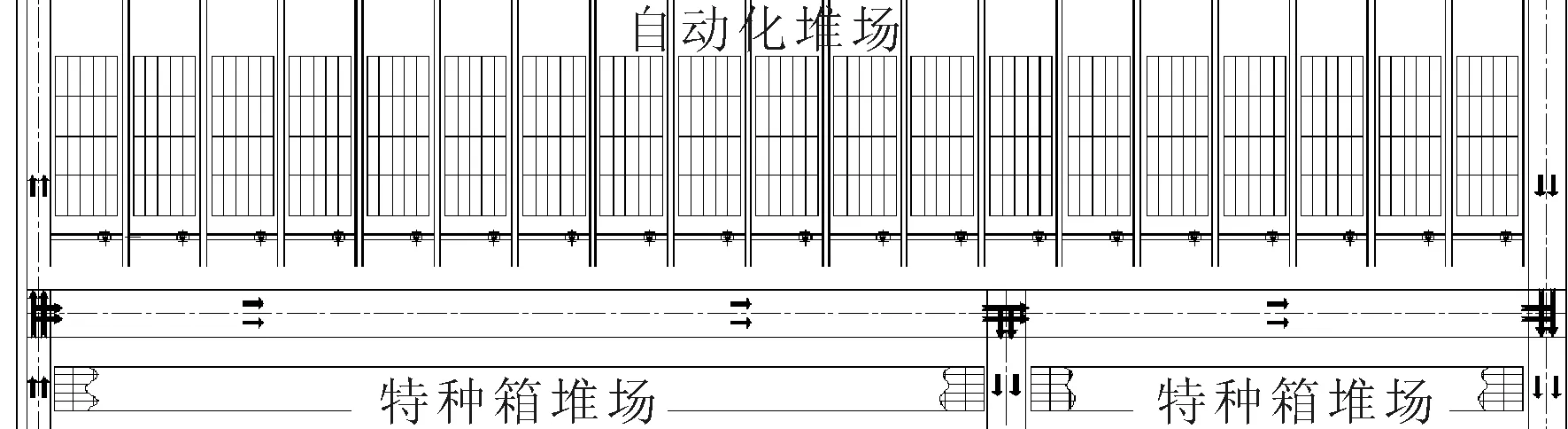
图5 自动化集装箱码头集疏运主干道道路路段示意图
3.2.2车辆行驶规则
自动化集装箱码头集疏运时,交通流特点为外集卡行驶速度较低且目标车道明确.外集卡进入集卡交接区进行装卸作业之前始终维持原车道,直至将要到达目标堆场时开始变换车道;外集卡完成装卸作业驶出集卡交接区之后即具有换车道需求,直至驶入目标车道.
4 两种交接工艺及平面布置方式的陆域集疏运仿真试验
4.1 仿真模型建立
码头设计年吞吐量为160万TEU,垂直岸线布置的堆场总长788 m,由22列宽度均为32 m的箱区组成,每隔两个箱区均设有一条宽为4 m的消防通道.码头进出闸口分离式布置,堆场陆侧布置4条右行单向车道.采用倒车式交接工艺时,堆场采用“接力式ARMG”的装卸工艺,其工作循环时间约为均值为7.26 min的均匀分布;采用顺靠式交接工艺时,堆场采用“ARMG+轨道式平板小车+交接起重机”的装卸工艺,其工作循环时间约为均值为4.64 min的均匀分布,此时路网中与堆场相邻的一条行车道需作为装卸道使用.
4.2 仿真试验设计
以四种影响因素为变量,设计14组仿真试验,见表1.每组试验的试验工况均为高峰期作业,仿真试验时间长度为7 d,仿真时间单位为min(共计10 080 min).
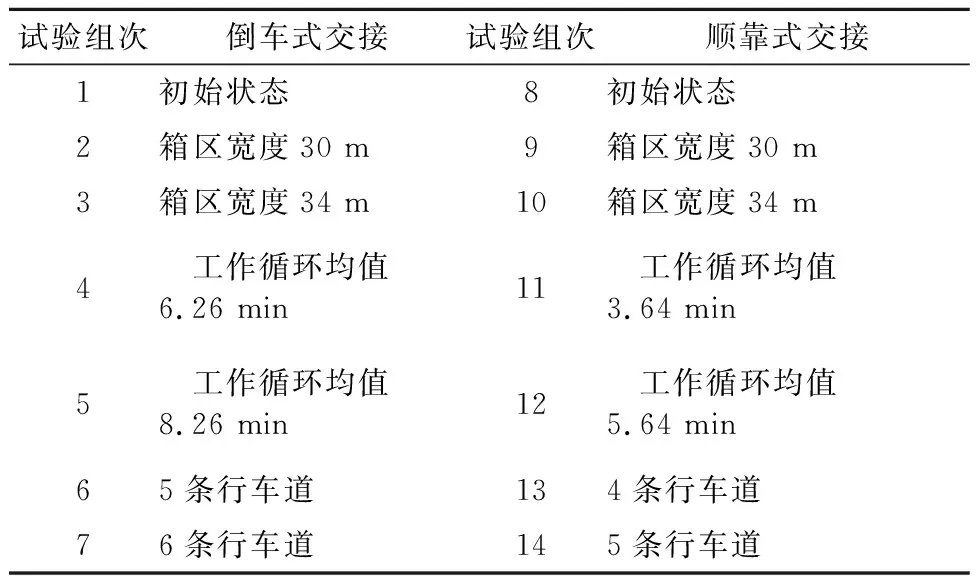
表1 仿真试验分组
本次仿真试验,主要统计外集卡的正常行驶时间与处于行驶状态的外卡车辆所占比重,从而根据式(3)推算出不同试验组次的行车道交通服务质量参数n,进而得出自动化集装箱码头集疏运交通流质量计算公式,评价集疏运交通流质量.顺靠式交接工艺的码头,参照行车道上的行驶速度,取0.50 km/min;倒车式交接工艺的码头,考虑其倒车操作,取0.38 km/min.
4.3 试验数据分析
4.3.1倒车式交接工艺集疏运路网交通服务质量评价
倒车式交接工艺的自动化集装箱码头各组试验所得外集卡的正常行驶时间与堆场工作的装卸设备所占比重及交通质量参数值,见表2.
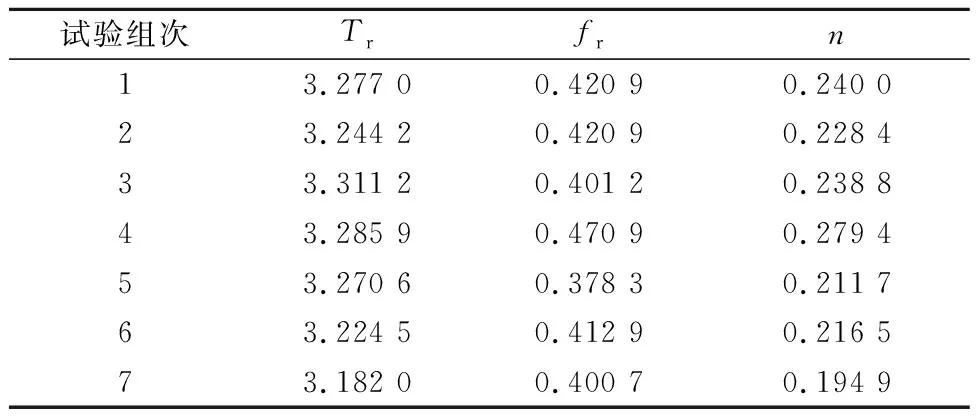
表2 倒车式交接码头试验数据及交通服务质量参数

.492 2+0.002 6X1-
0.033 8X2-0.022 5X3
(7)
对回归方程进行显著性检验:
.004 37
(8)

(9)
QB=QT-QA=0.004 22
(10)
(11)
因当α=0.05时,F0.025(3,3)=15.44;当α=0.1时,F0.05(3,3)=9.28,f=28.13>F0.025(3,3),故认为式(7)的线性回归方程是显著的.
对回归系数进行显著性检验.
.007 1
(12)
C=(XTX)-1=
(13)
.602 8-0.035X2-0.026 2X3
(14)
由式(14)可知,对于倒车式交接工艺的自动化集装箱码头,场桥的工作循环时间与行车道数量是影响集疏运路网交通服务质量的主要因素,且值始终维持在较低的水准,其原因是倒车区缓解了车辆驶入驶出装卸区时对行车道车辆的影响.
4.3.2顺靠式交接工艺集疏运路网交通服务质量评价
顺靠式交接工艺的自动化集装箱码头各组试验所得外集卡的正常行驶时间与堆场工作的装卸设备所占比重及交通质量参数值,见表3.
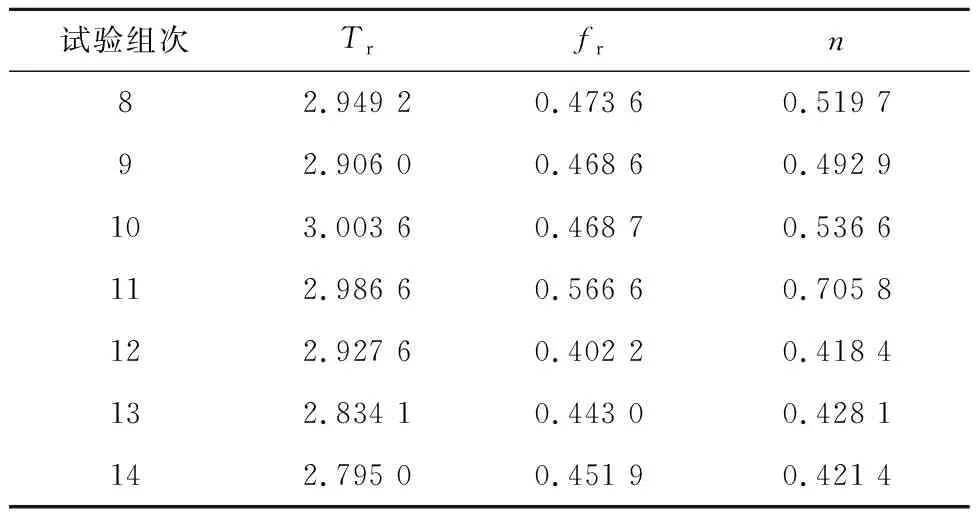
表3 顺靠式交接码头试验数据及交通服务质量参数
(15)
同式(8)~(11),对回归方程进行显著性检验,得F=13.11.因当α=0.05时,F0.025(3,3)=15.44;当α=0.1时,F0.05(3,3)=9.28.在水平α=0.05时,f=39.17
同式(12)~(13),对回归系数进行显著性检验,得t1=0.805 0;t2=-5.306 1;t3=-3.235 7.查表可得:当α=0.05时,t0.025(3)=3.182 4,α=0.1时,t0.05(3)=2.353 4,系数X1均显著为零,X2,X3均显著不为零.
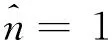
通过以上显著检验,式(15)回归方程的显著性为零,而三个回归系数中有两个显著不为零,造成这种现象的原因是样本的容量不足,故添加试验组次见表4,仿真试验所得数据见表5.
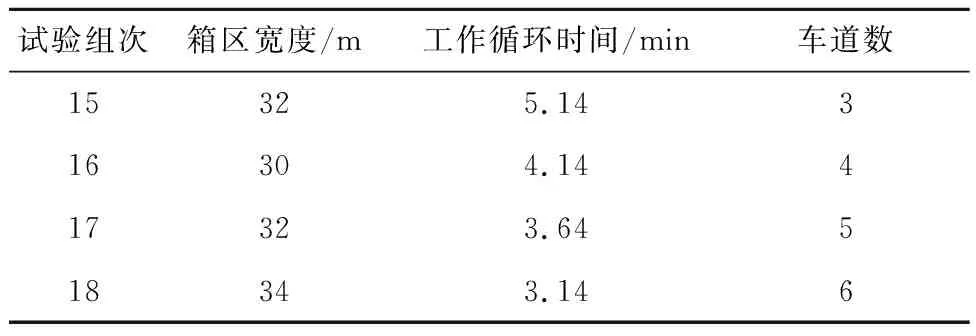
表4 添加试验组
表5 添加试验组试验数据及交通服务质量参数
.506 6+0.028 4X1-
0.165 2X2-0.042 8X3
(16)
同式(8)~(11),对回归方程进行显著性检验,得F=19.52.因当α=0.05时,F0.025(3,7)=14.62;当α=0.1时,F0.05(3,7)=8.89,f=19.52>F0.025(3,3),故认为式(16)的线性回归方程是显著的.
同式(12)~(13),对回归系数进行显著性检验,得t1=2.455 0;t2=-6.545 0;t3=-2.490 3.查表可得:当α=0.05时,t0.025(7)=2.364 6,α=0.1时,t0.05(7)=1.894 6,三个系数均显著不为零,各回归变量作用是显著地,式(16)检验通过.
由式(16)可知,对于顺靠式交接工艺的自动化集装箱码头,堆场宽度、场桥工作循环时间、行车道数量均对集疏运路网交通服务质量产生影响,并且场桥工作循环时间对服务质量的影响要远大于其余两个因素.其原因为,当场桥的工作循环时间缩短时,堆场装卸效率提高,进出装卸车道的车辆之间干扰更为频繁.
5 结 论
1) 对于采用倒车式交接的自动化集装箱码头,其场桥的工作循环时间与行车道数量是影响集疏运路网交通服务质量的主要因素,且由于倒车装卸区的缓冲作用使其交通服务质量始终优于采用顺靠式交接的码头.
2) 由于场桥作业效率的提高使进出装卸车道的车辆间的干扰更为频繁,场桥工作循环时间对采用顺靠式交接的自动化集装箱码头的交通服务质量的影响要远大于其余因素.