基于改进型ip-iq检测方法的配电网静止同步补偿器及其控制器的设计
2018-10-29王德祥林怡彤
王德祥,林怡彤
(1. 国网天津送变电工程有限公司 天津300161;2. 国网天津市电力公司客户服务中心 天津300000)
0 引 言
近几年,随着智能微电网、风电以及光伏等清洁能源的大规模应用,电网结构变得越来越复杂,同时,新能源并网对于配电网稳定性也构成极大的威胁。此外,目前电网中出现如电弧炉等非线性电力电子器件,也对电网的架构以及配电网的安全运行形成巨大考验。配电网静止同步补偿装置(distribution static compensator,D-STATCOM)作为动态无功功率补偿设备能够提高系统功率因数、降低线路损耗,是目前电能质量调节领域当中的主要组成部分,也是柔性交流输电系统(Flexible Alternative Current Transmission Systems,FACTS)中的重要装置[1-4]。
本文首先提出典型 D-STATCOM 结构示意图,并且建立其数学模型与状态方程,便于后续控制器的设计;其次,分析了传统无功电流检测法产生误差的原因,并且针对上述问题提出了满足配电网无功功率补偿要求的改进型ip-iq检测法,并且根据新型无功电流检测方法设计 ADRC控制器;通过仿真软件搭建10kV配电网仿真模型,结果验证了采用该方法的DSTATCOM装置的动态补偿特性,其在电网出现三相电压不平衡的情况下能准确快速地跟踪并补偿无功电流。
1 D-STATCOM结构与数学模型
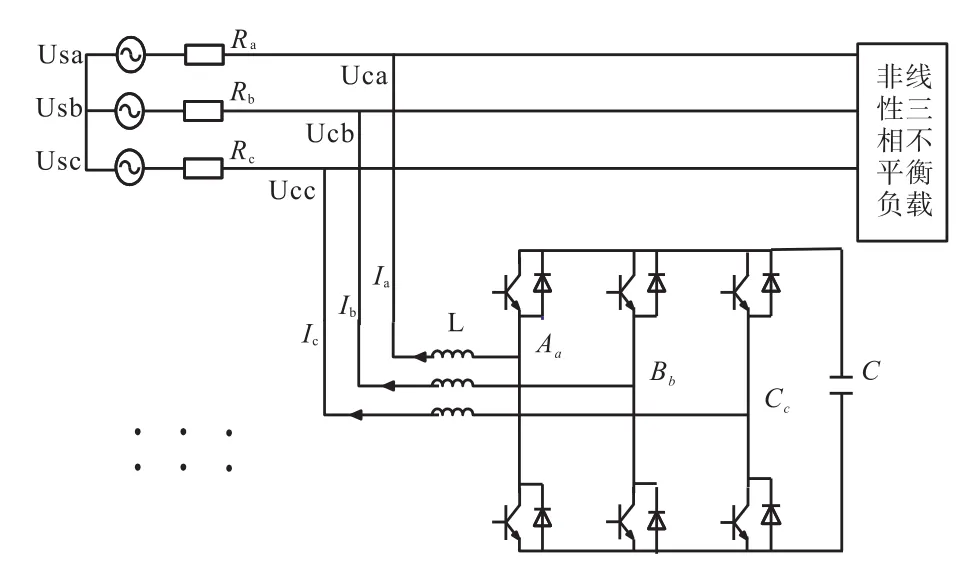
图1 D-STATCOM的结构示意图Fig.1 Structure of distribution static synchronous compensator
基于一些假设,根据图 1的 D-STATCOM 结构图可以得到系统三相电压以及装置输出电压,表示为(1)式和(2)式:
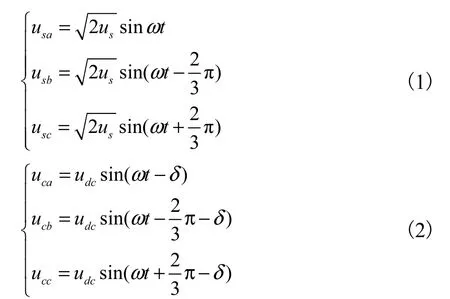
式中:usa、usb、usc分别表示系统三相电压;uca、ucb、ucc分别表示 D-STATCOM 的输出电压;udc是 DSTATCOM直流侧电压;δ是为补偿装置交流端输出与电网压之间电压的夹角,调节这个夹角大小控制D-STATCOM的逆变器来吸收或者发出无功功率[5-7]。
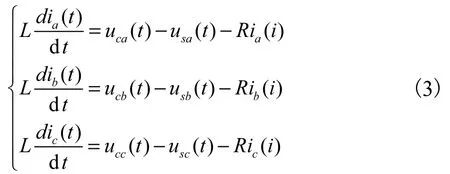
根据 D-STATCOM 结构示意图以及基尔霍夫电压定律,可以得到在abc静止坐标系下D-STATCOM动态方程组,表示成(3)式:
综合(1)、(2)、(3)式中可以算出 abc静止坐标系下无功补偿装置的动态方程组,表示成(4)式:

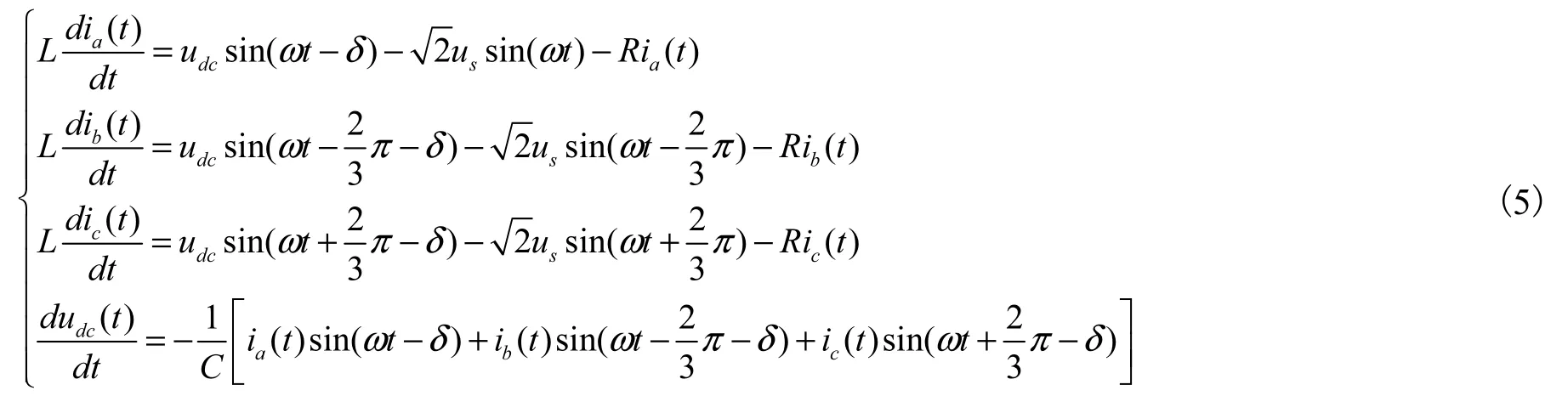
因此,综合(1)~(4)式能够计算出abc静止坐标系下D-STATCOM的数学模型,表示为(5)式:
经典Park变换矩阵可以表示为(6)式:

根据逆变器两侧功率平衡的原理,可以将逆变器两侧的功率表示为(7)式:

因此,综合(6)式、(7)式可以得到 D-STACOM在dq0旋转坐标系下的数学模型,表示为(8)式:

从(8)式可以看出,所得到的数学模型为常系数微分方程,方便控制器的设计。
2 改进型ip-iq检测方法
如图2所示,改进型ip-iq检测方法加入了变换矩阵 C32,经过坐标变换得到eα和eβ,δ角为实际信号与正序电压之间的夹角,输出的信号经过移相环节,最后通过三角函数关系运算可得到与电源正序基波电压在频率和相位上保持同步的正、余弦信号[8-10]。

图2 改进型ip-iq检测方法原理框图Fig.2 Principle diagram of improved ip-iq method
配电网正常运行时,由于非线性负荷的存在,导致配电网系统频率不断变化,并且会出现三相电压不平衡或者发生畸变,这种现象可以描述为(9)式:

利用数学关系式对(9)式进行变换,可以分离出正序分量,表示为(10)式:

根据(10)式可知,通过三角函数关系运算可得到与电源正序基波电压在频率和相位上保持同步的正、余弦信号,消除了因非对称电压而造成的检测误差,同时改进后的检测法省去了原理论中的锁相环及正余弦发生器装置,大大简化了硬件设计。
3 ADRC控制器的设计
3.1 自抗扰控制器
自抗扰控制器(见图 3)[11-13]由跟踪微分器(Tracking Differentiator,TD)、扩张状态观测器(Extended State Observer,ESO)和非线性状态误差反馈(Non-Linear State Error Feedback,NLSEF)组成。
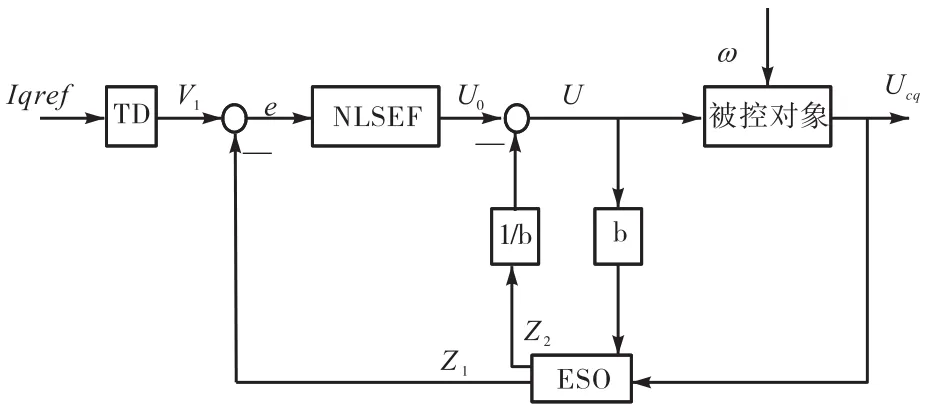
图3 自抗扰控制器框图Fig.3 The control system of ADRC
从式(11)中可以看出,有功电流id和无功电流iq之间存在强耦合关系,调节 id的同时也会引起 iq的变化,反之亦然。使用 ADRC中的 ESO能够将耦合项作为系统内扰,达到无功与有功电流解耦的目的。

由于 Us不便测量,所以分别将Us在旋转坐标系中的d轴和q轴分量Usd和Usq视为不确定项,将耦合项和不确定项视为系统的内部扰动,表示为(12)式:

4 仿真模型与仿真结果分析
4.1 仿真模型的搭建
为了验证 ADRC控制器能否在电力系统发生三相不平衡工况下实时准确地检测无功电流、控制 DSTATCOM 吸收或发出无功功率,本文在Matlab/Simulink 2010b中搭建 10kV配电网仿真模型并且设置可编程电压,以便在动态仿真实验中设置三相不平衡的工况,从而体现改进措施的优势。
4.2 仿真结果分析
图4为配电网静止同步补偿器所发出的有功功率与无功功率曲线,从下图曲线可以看出,由于 DSTATCOM不消耗或消耗很少的有功功率,因此有功功率曲线始终在0附近有小幅波动。
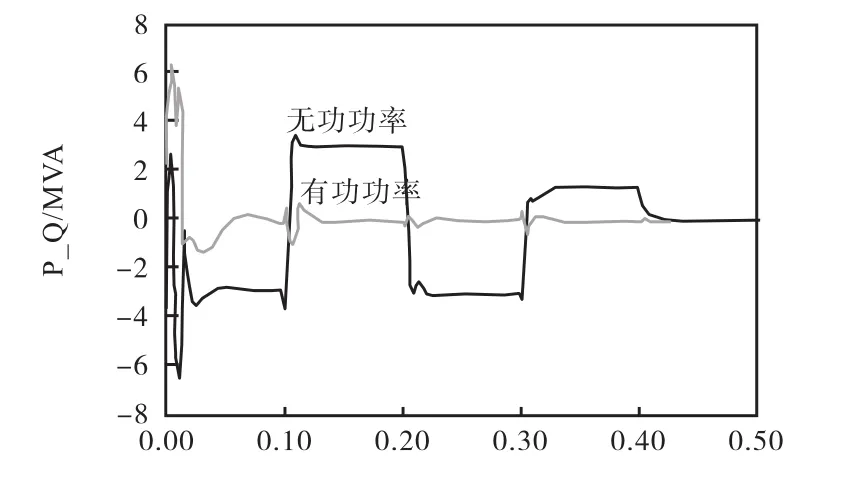
图4 配电网静止同步补偿的有功功率与无功功率曲线Fig.4 The curve of active power and reactive power
5 结 语
本文对配电网静止同步补偿装置的无功电流检测环节进行改进,并在控制策略方面选择 ADRC来控制系统的无功电流。基于提出的改进型检测方式设计 ADRC,通过与 PID的对比表明,ADRC能够提升D-STATCOM的动态特性,提高系统的抗干扰能力。
