基于SolidWorks三维软件的移动式侧方停车位设计
2018-10-26王玉勤丁泽文王寅斌武海峰
王玉勤,丁泽文,王寅斌,武海峰
(巢湖学院 机械工程学院,安徽 巢湖,238000)
随着社会发展和进步,汽车的社会保有量在逐年增加,已成为人们日常生活不可或缺的交通设备。由于城市的停车设施建设明显滞后于车辆的发展要求,停车难的问题已经严重影响人们的出行和城市运行效率[1]。如何破解停车难的问题,已成为世界各国关注和研究的重要课题[2]。目前,除了新建和扩建停车场、发展立体车库等措施外[3],基于物联网技术的共享停车和智慧停车等新技术也应运而生,可以充分利用闲置的车位资源以及有效降低车位的占地面积[4-7]。
在进行侧方位停车时,由于操作不熟练,驾驶人员往往需要进行反复的操作才可以入库;另外,由于车辆在车库内的方位不正,驾驶人员在取车时也会带来一定的麻烦;同时,普通侧方停车位的占地面积也较大。文中结合现实的生活需求采用SolidWorks三维软件设计出了一款移动式侧方停车位,利用SolidWorks motion插件对所设计出的车位进行实际作业下性能模拟,以期提高移动式侧方停车位在现实生活中的使用性能,降低设计成本。
1 移动式侧方停车位组成和工作原理
移动式侧方停车位主要包含液压杆、丝杆、齿轮齿条等基本传动构件[8],各部件通过相互之间的配合和特定的运动方式来完成载车板的升降和移动。所设计的移动式侧方停车位与传统侧方停车位相比,驾驶人员无需多次调整车辆与停车位的相对位置,直接以直线驶入和驶出车位的方式进行停取车操作,节省了停车时间。
1.1 移动式侧方停车位组成
移动式侧方停车位主要由动力系统和承载装置构成。动力系统主要包括液压杆、丝杆滑台、丝杆、丝杆底座、齿轮、电机平台、电机和导向接头等零部件。承载装置主要包括载车板、滚轮、导向杆、齿条和滚轮轴等零部件。停车位三维模型如图1所示。
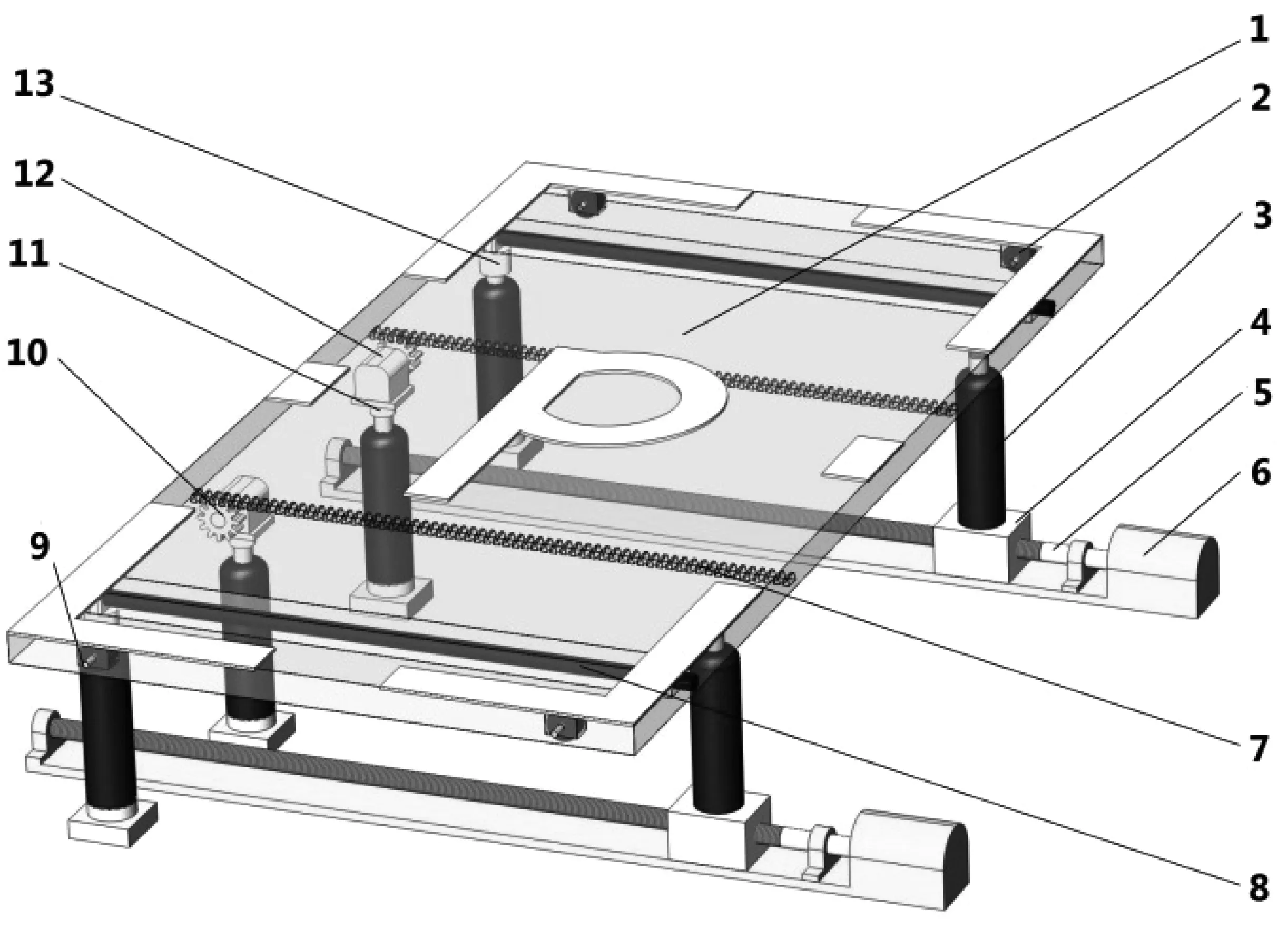
1-载车板;2-滚轮;3-液压杆;4-丝杆滑台;5-丝杆;6-丝杆底座;7-齿条;8-导向杆;9-滚轮轴;10-齿轮;11-电机平台;12-电机;13-导向接头图1 移动式侧方停车位三维模型Fig.1 The 3D model of mobile lateral parking space
1.2 工作原理
滚轮2和导向杆8均安装于载车板底面,以轴孔形式装配在一起。图1中,位于丝杆滑台4上的液压杆3起到支撑和移动载车板1的作用;带有电机12的液压杆主要作用是在载车板1上升时带动电机12一同上升,起到保证齿轮10齿条一直处于啮合状态;带有导向接头13的液压杆3下端处于固定状态,主要起到支撑载车板1的作用。在工作状态下,液压杆3在压力作用下均一起上升,使得载车板1下端面高于安装水平面,滑轮2底端水平切线与安装水平面共面,当载车板1达到预定高度后,液压杆3停止工作并进行高度的锁定。此时,丝杆5及齿轮10均发生相应的转动,通过齿轮10与齿条的啮合传动,从而带动载车板1进行横向移动;丝杆5转动推动丝杆滑台4移动,并带动载车板1进行横向移动。载车板1移动到相应位置后,装置将停止工作,驾驶员驾驶车辆以直线驶入或驶出载车板从而实现停取车工作。当车辆停放或驶出作业完成后,装置将进行反向运动直至回到初始位置。移动式侧方停车位的三个工作位置如图2所示。
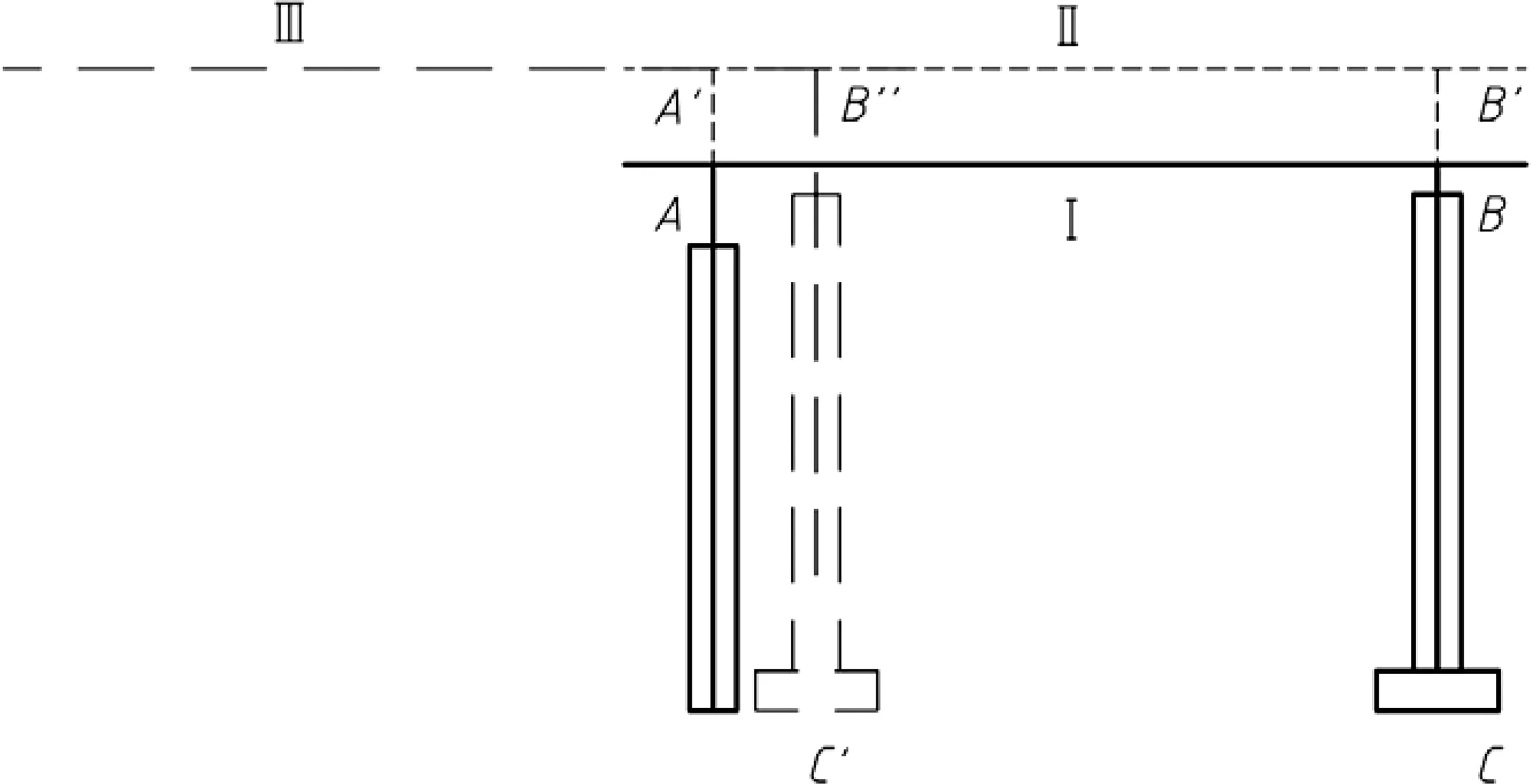
I-未工作位置;II-最高工作位置;III-最远工作位置图2 移动式侧方停车位的三个工作位置图Fig.2 Three working positions of mobile lateral parking spaces
接下来,利用SolidWorks motion插件对移动式侧方停车位工作过程中相应部件进行运动学及动力学分析。
2 移动式侧方停车位仿真及结果分析
2.1 移动式侧方停车位运动学仿真
移动式侧方停车位的作业过程:在0-5s内,各液压杆在压力作用下伸长12cm,载车板被升起;在5-15s内,电机带动齿轮转动,丝杆也发生相应转动,推动载车板横向移动180cm到达指定位置处,完成车辆的停入与取出;在15-25s内,齿轮和丝杆反方向转动带动载车板回到对应位置;在25-30s内,各液压杆解锁,载车板下降回到初始位置。作业过程主要由液压杆、齿轮、丝杆的运动来完成。
根据现行《停车场规划设计规则》要求,小型机动车停车位长度为500cm,宽度为220-250cm。当车辆驶入移动式侧方停车位时,无需考虑传统侧方位停车时车辆前后、左右的间隙,只需将车辆驶入载车板即可。综上所述,并参考市面车辆尺寸大小,设定载车板长度为460cm,宽度为190cm,厚度为12cm,所设计的侧方停车位有效降低了车位的占地面积。
利用SolidWorks中motion插件对移动式侧方停车位进行仿真分析[9],模拟出真实的工作过程,预测出结构设计对装置工作性能的影响情况。
采用SolidWorks motion插件所提供的STEP(time,x0,h0,x1,h1)函数对运动副进行对应的驱动[10],STEP函数中time表示时间变量,x0表示某一动作的初始时间,x1表示该动作的结束时间,h0和h1分别表示该动作的初始和结束位置。载车板自重50kg,载车板上车辆重1500kg,预设置15500N为真实作业下外力承载情况。通过对移动式侧方停车位作业过程的分析,得到STEP函数中液压杆及丝杆滑台的运动参数。STEP函数中均采取相对坐标系对构件的位置进行设定。
液压杆运动STEP函数如下:
STEP(time,0,0,5,12)+ STEP(time,25,0,30,-12)
丝杆滑台运动STEP函数如下:
STEP(time,5,0,15,180)+ STEP(time,15,0,25,-180)
将所得STEP函数导入到SolidWorks所设定的运动副中,即可完成对应的仿真任务[11],实现由位置Ⅰ到位置Ⅲ以及由位置Ⅲ返回到位置Ⅰ的整个运动过程。为便于分析,选取半个运动过程进行分析,即由位置Ⅰ到位置Ⅲ。
1)载车板的纵向运动学分析
图3为载车板纵向运动学参数变化曲线图,在载车板上升过程中,在 0s处载车板的高度为134cm,在5s处高度达到最大值146cm,载车板最大上升高度为12cm,满足设计要求的上升高度,且在5s后高度不变满足液压杆的自锁条件;在2.5s处速度达到最大值,且速度变化呈抛物线形式变化,满足运动速度要求;加速度最大值出现在0s处,且呈减函数的形式变化,符合液压杆传动规律。
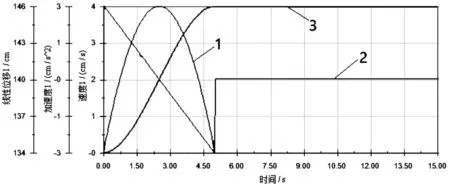
1-速度;2-加速度;3-线性位移图3 载车板纵向运动学参数变化曲线图Fig.3 Traces of longitudinal kinematic parameters of vehicle loading board
2)载车板横向运动学分析
图4为载车板横向运动学参数变化曲线图,在载车板横向移动过程中,在5s处载车板的初始位置为-196cm,在15s处极限位置为-16cm,得到载车板最大平移距离为180cm,满足设计要求的平移距离;在10s处速度达到最大值,呈抛物线形式变化,满足运动速度要求,且在15s时速度为0,满足到达极限位置停止作业的设计要求;加速度最大值出现在5s处,且呈减函数的形式变化,符合正常丝杆和齿轮齿条传动的运动规律。
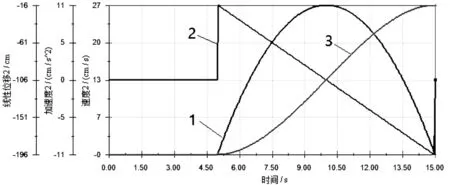
1-速度;2-加速度;3-线性位移图4 载车板横向运动学参数变化曲线图Fig.4 Traces of lateral kinematic parameters of vehicle loading board
2.2 移动式侧方停车位动力学仿真
整个装置所受外载荷主要是由于外界施加在载车板上的压力F,压力F作用的方向为竖直向下且数值和方向始终不发生任何的变化,在SolidWorks里采取外加载荷的方式进行压力F的加载,并利用上述STEP函数进行动力学仿真。
1)载车板纵向受力分析[12]
图5所示为载车板纵向运动受力曲线图,在0s时载车板所受动力达到最大值,液压所提供的推力值为20150N,达到预期设计标准;在载车板上升过程中,由运动学分析可知,加速度为减函数变化,受力情况也为减函数形式变化;在5s时载车板受到的合力达到15500N,此时液压杆将停止工作,整个装置将只受外载荷F的作用。
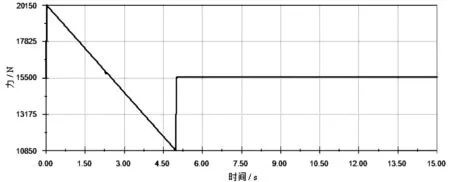
图5 载车板纵向运动受力曲线图Fig.5 The stress trace of longitudinal motion of vehicle loading board
2)载车板横向受力分析
图6所示为载车板横向运动受力曲线图,在0~5s内横向受力为0N,此时载车板将不受横向力作用;在5s时载车板受到的横向推力达到最大值为17050N,推动载车板发生横向移动,在载车板移动过程中,由运动学分析可知,加速度为减函数,受力情况以减函数形式进行变化;在15s时提供的力达到最小值0N,此时丝杆及齿轮齿条将停止运动,整个装置将只受外载荷F的作用,安装水平面对载车板底部滑轮向上的推力为-F。

图6 载车板横向运动受力曲线图Fig.6 The stress trace of transverse motion of vehicle loading board
3 移动式侧方停车位实物演示
依据上述运动学及动力学分析,制作如图7所示移动式侧方停车位。停车位的载车板由快速成型3D机打印而成,丝杆、齿轮、丝杆滑台和滚轮等构件采用机械加工完成。
图7所示为移动式侧方停车位未工作时的初始状态,此时液压、丝杆、齿轮齿条均未进行相应的工作,载车板位于初始位置。
当使用者进行停取车时,液压杆在压力作用下带动载车板上升,达到如图8所示的纵向预定高度。此时丝杆、齿轮齿条均未开始工作;当液压停止工作后,丝杆及齿轮将发生转动,从而推动载车板进行平移运动,达到如图9所示的横向极限位置。

图7 移动式侧方停车位实物图Fig.7 The physical map of mobile lateral parking space
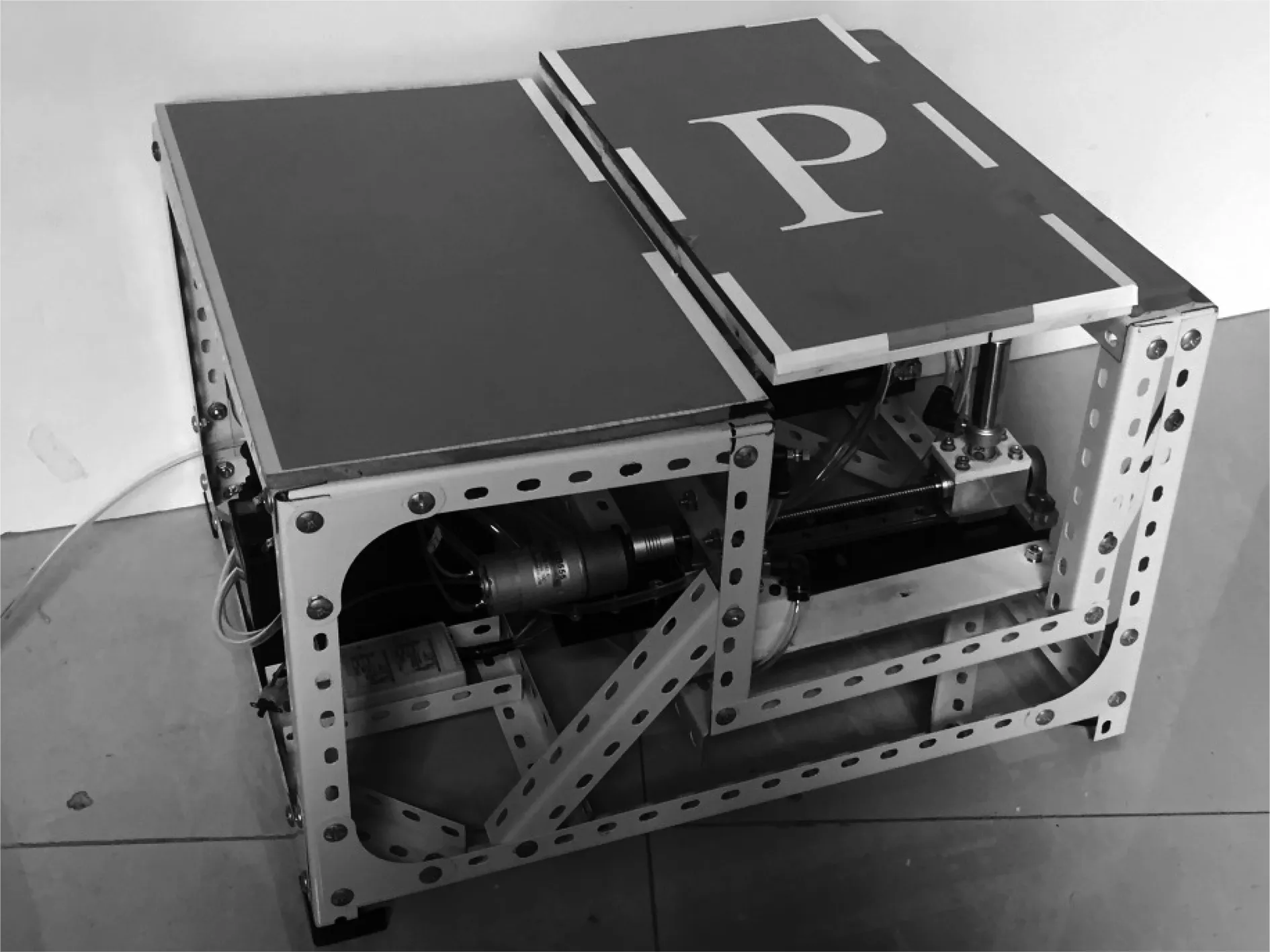
图8 移动式侧方停车位纵向运动示意图Fig.8 A schematic diagram of longitudinal motion of mobile lateral parking spaces
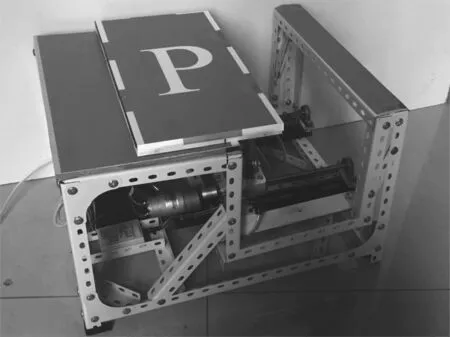
图9 移动式侧方停车位横向运动示意图Fig.9 A schematic diagram of lateral motion of mobile lateral parking spaces
4 总结
1)为解决目前侧方位停车难的问题,减少驾驶人员停车时间,节约车位占地面积,设计了移动式侧方停车位。移动式侧方停车位在设计过程中考虑到设备的操作灵活性和占地面积,载车板底面两侧均设有滚轮,有利于载车板在路面上灵活移动;结合市面上车辆尺寸大小设计载车板,降低了整个停车装置的占地面积。
2)该移动式侧方停车位可以实现以直线驶入和驶出的形式完成车辆的停取功能。在对移动式侧方停车位主要部件进行运动学和动力学分析的基础上,通过各部件的相互配合运动规律,设计出符合要求的侧方停车位。
3)采用SolidWorks对产品三维模型进行设计和仿真,实时掌握产品在设计和使用过程中的各种作业情况,降低了研究成本,提高了设计效率。所设计的侧方停车位,结构简单,操作方便,占地面积小,具有一定的市场推广价值。