基于LabVIEW CDS的风力机叶片经典颤振监控系统设计
2018-10-21许博杰方正哲潘佳男
许博杰 方正哲 潘佳男
摘 要:基于Beddoes-Leishman气动模型设计风力机叶片控制系统。利用LabVIEW CDS模块搭建出经典颤振模型,并对其进行经典颤振特性分析。在此基础上,设计PID、LQR、Adaptive Control控制器对风力机在不稳定情况下进行校正。
关键词:风力机;经典颤振;自动控制系统;LabVIEW
中图分类号:TK83 文献标识码:A 文章编号:2096-4706(2018)08-0176-04
Absrtact:The control system of the wind turbine blades was designed based on the Beddoes-Leishman dynamic model. The classical flutter model is built by using LabVIEW CDS module,and the classical flutter characteristics are analyzed. On this basis,PID,LQR and Adaptive Control controllers are designed to correct the wind turbine under unstable conditions.
Keywords:wind turbine;classical flutter;automatic control system;LabVIEW
0 引 言
眾多的可再生能源技术开发中,风力发电是世界上增长最快的能源。近年来随着风力机型的增大,其叶片展向长度也随之加大。因此在惯性力、弹性力和复杂气动负载力耦合作用下,叶片会出现颤振现象。经典颤振问题是研究大型风力机叶片安全稳定运行的一个重要问题。水平风力机叶片的经典颤振为气流流动基本附着无明显分离情况下,风机叶片扭转自由度和挥舞自由度产生的自激振荡。如今风电场大多采用自动化运行方式,如果没有一套完备的监控系统,将导致运行人员无法对风力机运行过程中出现的问题及时控制,可能导致叶片及风力机组出现故障,严重时可致使风力机叶片断裂和损毁,造成不可挽回的巨大经济损失。
1 基于LabVIEW CDS的风力机叶片经典颤振模型仿真模拟
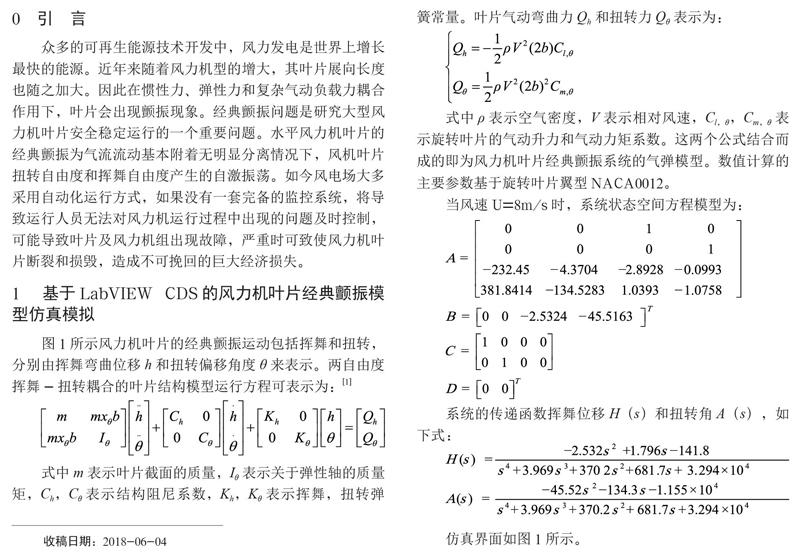
图1所示风力机叶片的经典颤振运动包括挥舞和扭转,分别由挥舞弯曲位移h和扭转偏移角度θ来表示。两自由度挥舞-扭转耦合的叶片结构模型运行方程可表示为:[1]
仿真界面如图1所示。
2 基于LabVIEW CDS的风力机叶片经典颤振特性分析
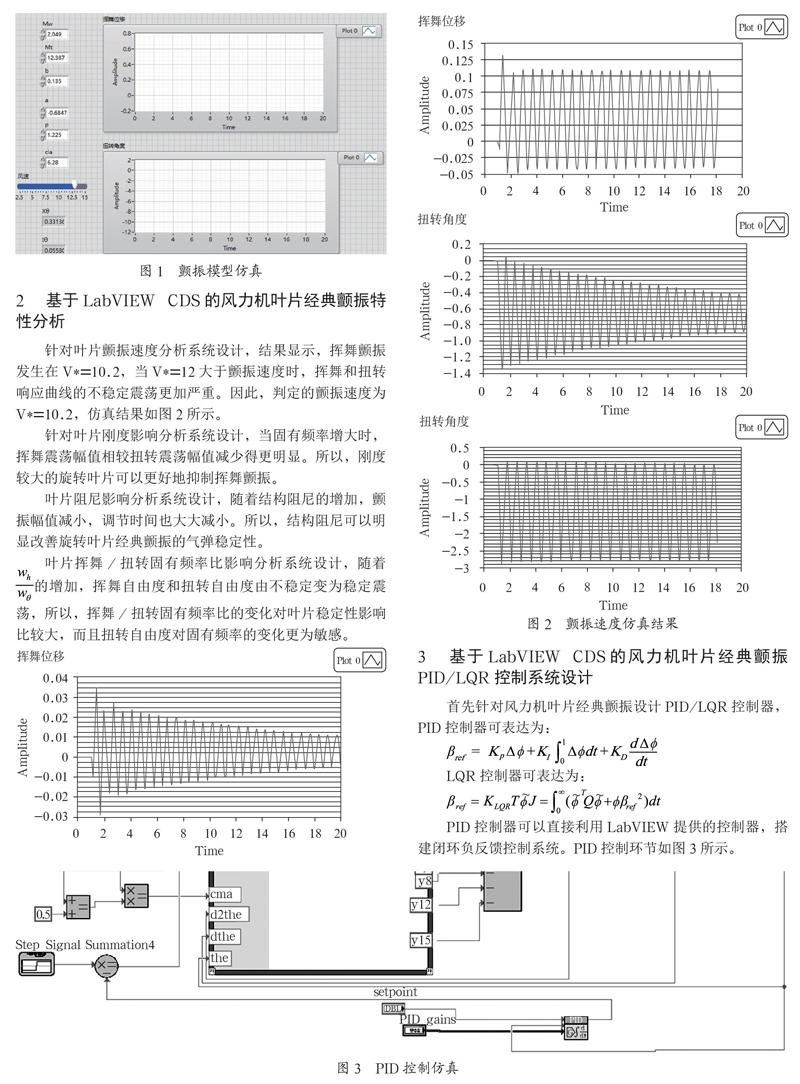
针对叶片颤振速度分析系统设计,结果显示,挥舞颤振发生在V*=10.2,当V*=12大于颤振速度时,挥舞和扭转响应曲线的不稳定震荡更加严重。因此,判定的颤振速度为V*=10.2,仿真结果如图2所示。
针对叶片刚度影响分析系统设计,当固有频率增大时,挥舞震荡幅值相较扭转震荡幅值减少得更明显。所以,刚度较大的旋转叶片可以更好地抑制挥舞颤振。
叶片阻尼影响分析系统设计,随着结构阻尼的增加,颤振幅值减小,调节时间也大大减小。所以,结构阻尼可以明显改善旋转叶片经典颤振的气弹稳定性。
叶片挥舞/扭转固有频率比影响分析系统设计,随着 的增加,挥舞自由度和扭转自由度由不稳定变为稳定震荡,所以,挥舞/扭转固有频率比的变化对叶片稳定性影响比较大,而且扭转自由度对固有频率的变化更为敏感。
3 基于LabVIEW CDS的风力机叶片经典颤振PID/LQR控制系统设计
首先针对风力机叶片经典颤振设计PID/LQR控制器,PID控制器可表达为:
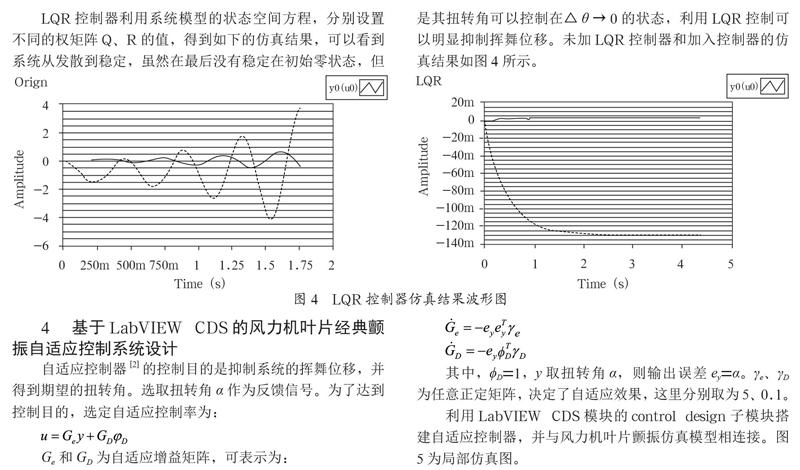
PID控制器可以直接利用LabVIEW提供的控制器,搭建闭环负反馈控制系统。PID控制环节如图3所示。
LQR控制器利用系统模型的状态空间方程,分别设置不同的权矩阵Q、R的值,得到如下的仿真结果,可以看到系统从发散到稳定,虽然在最后没有稳定在初始零状态,但是其扭转角可以控制在△θ→0的状态,利用LQR控制可以明显抑制挥舞位移。未加LQR控制器和加入控制器的仿真结果如图4所示。
4 基于LabVIEW CDS的风力机叶片经典颤振自适应控制系统设计
自适应控制器[2]的控制目的是抑制系统的挥舞位移,并得到期望的扭转角。选取扭转角α作为反馈信号。为了达到控制目的,选定自适应控制率为:
其中,?D=1,y取扭转角α,则输出误差ey=α。γe、γD为任意正定矩阵,决定了自适应效果,这里分别取为5、0.1。
利用LabVIEW CDS模块的control design子模块搭建自适应控制器,并与风力机叶片颤振仿真模型相连接。图5为局部仿真图。
当风速U=8m/s时,可获得如图6响应波形结果。
5 监控系统的设计
利用LabVIEW功能模块和按键功能分别设计系统登录界面和程序,以及设计风力机叶片运行系统主界面。后面板通过子程序,使用for循环、条件结构、数组函数、局部变量、控制与仿真工具包中的Control Design模块实现,将等效叶片模型拆分成可逆部分和不可逆部分,并使用图标编辑器将子程序的图标美化,选择适当模式引出接线端。主界面如图7所示。
6 结 论
利用PID、LQR、自适应控制器来控制风力机叶片,在受到不同风速作用下时,通过系统辨识得出叶片运动状态,控制器通过反馈的参数自动调整控制参数,最终使叶片挥舞振动和扭转振动在一定时间内快速稳定,利用实时监控,可以监测出系统的运行状态,从而能达到很好的控制效果,减少了风机叶片的损伤,对风机叶片运行监控和维护有很大作用。
参考文献:
[1] Galvanetto U,Peiro J,Chantharasenawong C. An assessment of some effects of the nonsmoothness of the leishman-beddoes dynamic stall model on the nonlinear dynamics of a typical aerofoil section [J].Journal of Fluids and Structures,2008,24(1):151-163.
[2] LI N,BALAS M. Aeroelastic control of a wind turbine blade using microtabs based on UA97W300-10 airfoil [J].Wind Engineering,2013,37(5):501-516.
作者简介:许博杰(1997.05-),男,江苏南通人,本科在读。电气工程及其自动化专业;方正哲(1997.06-),男,江苏苏州人,本科在读。电气工程及其自动化专业;潘佳男(1997.03-),男,江苏张家港人,本科在读。电气工程及其自动化专业。
