基于AD-ALINEA的入口匝道控制方法
2018-10-19王卫卫张尚伟王江兰袁涛
王卫卫, 张尚伟,王江兰,袁涛
(烟台工程职业技术学院,山东 烟台 264006)
随着经济的发展,交通拥堵已经成为世界各国城市发展所面临的首要问题之一。城市交通拥堵不仅使能源消耗和环境污染不断增加,而且还降低了道路的安全性和运行效率。城市快速路作为城市交通基础设施的关键组成部分,在城市交通中承担了重要的作用。而入口匝道是连接城市普通干道和城市快速路的重要方式,入口匝道的合理控制能够在一定程度上缓解快速路拥堵[1]。因此,有效的入口匝道控制关系着整个城市交通系统的运行效率。
入口匝道控制是根据快速路上的交通需求控制由匝道进入快速路的车辆,从而使快速路上的车辆运行处于最佳状态[2],是应用最广泛、也是最有效的一种缓解城市快速路交通拥挤的控制形式[1]。经典的ALINEA算法通过检测快速路下游的占有率,在上一时刻匝道调节率的基础上,根据固定的临界占有率与检测到的占有率之间的差值,对入口匝道进入快速路的车辆数目进行实时控制,从而使快速路交通维持在最佳状态附近。为了使控制算法与实际道路交通状况更接近,Smaragdis等[3]对ALINEA进行改进,提出AD-ALINEA(Downstream-measurement Based Adaptive ALINEA),该控制方法将ALINEA中固定的临界占有率改为随时间变化的数值,计算每个取样时间内实测的交通量与占有率的导数,该导数在限定范围内时采用原占有率, 否则就将占有率在原基础上增大或减少一定数值。Wang等[4]针对瓶颈位于入口匝道下游具体位置的情况,提出了PI-ALINEA方法。此后,其又针对瓶颈位于入口匝道下游随机位置的情况,假设瓶颈可能产生于入口匝道下游的多个位置,对于每个瓶颈的可能位置,应用PI-ALINEA方法计算调节率,并将最终调节率取为这几个调节率滑动平均值的最小值[5]。Ruijgers等[6]将ALINEA方法与主路上游车辆的稳定性相结合,对ALINEA进行改进,使匝道调节率在ALINEA的基础上根据主路上游车辆的稳定性发生微小改变。此外,关于ALINEA方法的改进还有FL-ALINEA(Flow-Based ALINEA)、UP-ALINEA(Upstream-Occupancy Based ALINEA)等[7-10]。然而,这些控制方法主要考虑的是快速路本身的流量,没有考虑匝道排队对匝道和与之相连普通道路交通的影响,只考虑到提高快速路的交通效率,没有兼顾整体路网的交通公平性。
在对匝道进行控制时,既要考虑快速路交通流量,又要考虑匝道排队的影响,所以在基于AD-ALINEA的基础上,我们采用了一种新的方法,这种方法同时考虑到主线交通和匝道排队长度过长的影响,将最终的匝道调节率取为由AD-ALINEA和排队控制计算出的两个调节率的最大值,当匝道排队很小时,排队控制不起约束作用,匝道调节率由AD-ALINEA计算得到。而当排队增大到一定值时,排队控制开始起约束作用,匝道调节率由排队控制计算得到,从而防止了匝道上排队过长情况的出现,保证了与快速路相连的其他道路的交通。最后,本文对所提出的控制方法进行仿真评价并得出结论。
1 匝道控制方法
1.1 匝道体系结构
本文模拟的匝道情形如图1所示,其中城市快速路具有较高的通行能力,普通道路具有较低的通行能力,两者通过匝道连接在一起。

图1 道路拓扑结构图Fig. 1 Sketch of the on-ramp system
1.2 匝道控制方法
1.2.1 ALINEA算法
该算法是20世纪70年代提出的一种控制方法, 以实测的交通流参数为依据,不断地对匝道控制率进行调节[11],从而使主线上的车辆维持在最佳状态下。具体计算方法如下:
r(t)=r(t-1)+Kr(O-Oout(t-1)),
(1)
其中:r(t)是t时刻入口匝道的调节率,O是匝道下游的期望占有率,通常取O=Ocr,Ocr为临界占有率的值,在ALINEA中,Ocr为固定值。Oout(t)是t时刻匝道下游的占有率。Kr是调节参数,ALINEA算法对于Kr值的选择不敏感.即使Kr在很大范围内变动,系统也能保持良好的控制效果[12]。研究表明,当Kr=70时,可以得到最佳控制效果。
1.2.2 AD-ALINEA算法
为了加强ALINEA控制方法的实时性与适应性, Smaragdis等[7]提出了针对匝道下游的AD-ALINEA算法,引入一个临界占有率的估计器, 以获得实时变化的临界占有率, 使之与道路实际情况更加吻合。与ALINEA方法不同,该控制方法中的临界占有率Ocr不是固定值,而是随时间变化的值。
r(t)=r(t-1)+Kr(Ocr(t)-Oout(t-1)),
(2)
(3)
式中,D为每个时间段内实测的交通量与占有率的导数,如果D在[D-,D+]范围内(其中D+≥0,D-≤0), 就采用原有的占有率,若不在该范围内则在原有基础上相应增大或减少Δ,具体算法见文献[3]。
1.2.3 新的匝道控制方法
ALINEA算法主要针对快速路的下游拥堵问题,通过限制入匝道车辆来减少快速路下游的交通拥堵。但这种方法没有考虑到入匝道可能会出现排队延伸至与快速路相连接的干道的情形,从而会影响相邻道路的运行效率,因此,本文提出了将匝道排队长度约束与AD-ALINEA控制相结合的方法。具体算法过程如下:
(4)
R(t)=max[r(t),r′(t)],
(5)
其中,r′(t),r(t),R(t)分别为t时刻由匝道排队控制求出的匝道调节率、由AD-ALINEA控制方法计算出的匝道调节率以及最终匝道调节率。Kj,k分别为阻塞密度和当前密度。lcell是每个匝道元胞的长度,d为交通需求,M是一个控制参数,设为60 s。
由式(2)~(5)可以看出,当交通需求很小时,快速路还远未达到拥挤状态,由AD-ALINEA计算出的控制率r(t)将会很高,同时,如式(4)所示,由排队约束计算出的控制率r′(t)将会很低,因此,此时最终调节率由AD-ALINEA计算得到,AD-ALINEA控制方法占主导地位。然而,随着交通需求的增长,由AD-ALINEA计算出的控制率r(t)将会降低,从而导致匝道排队长度增加,为了避免匝道排队长度过长,由排队约束计算出的控制率r′(t)将增加,当r′(t)大于r(t)时,排队控制将发挥作用并占据主导地位。这种新的控制方法只有在匝道排队控制方法计算出的匝道调节率大于AD-ALINEA控制方法计算出的匝道调节率时,排队控制才被激发,防止了匝道上过长排队长度的形成,进而保证了与快速路相连的普通道路的交通(如图1所示)。
2 元胞传输模型(CTM)
2.1 路段模型
CTM路段模型将路段划分为多个等距的小段元胞[13-15], Daganzo[16]提出,该模型假设路段上的交通流量q与密度k有式(6)所示的关系(图2):

图2 元胞传输模型密度-流量图Fig. 2 Relationship between density and flow of CTM
(6)
式中,v,ω,qmax,Kj分别表示自由流速度、交通拥挤时车流的反向传播速度、最大交通流量以及阻塞密度。将时间离散化,元胞长度取为自由流在一个时间步长内走行的距离,可以得到由元胞i-1流入元胞i的流量,如式(7)所示:
yi=qδ=min{vki-1δ,qmaxδ,ω(Kj-k)δ}。
(7)
由于元胞内的车辆数目ni=kivδ,因此可将上式表示为:
yi(t)=min{ni-1(t),Qi(t),ω(Ni(t)-ni(t))/v},
(8)
ni(t)=ni(t-1)+yi(t-1)-yi+1(t-1),
(9)
其中,ni(t)为t时刻元胞i内的车辆数;yi(t)为t时刻元胞i的流入率;Qi(t)为t时刻元胞i的最大流入率;Ni(t)为t时刻元胞i的最大承载能力。
2.2 节点模型
本文构造的CTM节点模型为合流CTM模型,其结构如图3所示:

图3 元胞传输模型的合流节点模型示意图Fig. 3 The structure of merging node model in CTM
该模型基于以下规则:
(1)车辆进入末尾元胞以后全部驶离末尾元胞。
(2)上游路段直接进入节点的车辆与由匝道进入节点的车辆按比例流入节点元胞。
不采用匝道控制时,最终调节率R(t)选取为一个无限大的值,当采用AD-ALINEA方法对入口匝道进行控制时,其初始调节率取为r(t)=Q(t),Q(t)为匝道元胞的最大流入率,其后的调节率根据(2)进行更新,最终调节率R(t)=r(t)。当采用本文提出的控制方法时,最终调节率的计算如式(5)所示。
3 模拟与结果分析
3.1 仿真模拟
本文应用CTM模拟匝道情形,参照文献[13],其模型参数的选择如下所示:ω=7.76 m/s,v=16.7 m/s,Kj=0.17 辆/m,δ=1 s,主路、匝道与普通道路元胞的最大流入率分别为1.8 辆/s,0.9 辆/s,0.9 辆/s,主路、匝道与普通道路元胞所能容纳的最大车辆数,即元胞的最大承载能力分别为5.6,2.8,2.8。模拟的总时间为240 min。假设各时刻主路与匝道的交通需求如图4所示。

图4 各时刻各道路的交通需求Fig. 4 Traffic demand scenario
对于提出的新的匝道控制方法,即将AD-ALINEA与排队约束相结合的方法,其参数的选取如下所示:
Kr=70,Δ=3 辆/(km·车道),D+=25 km/h,D-=-25 km/h,T=60 s,kmax=125 辆/(km·车道)模拟所得结果如图5所示:
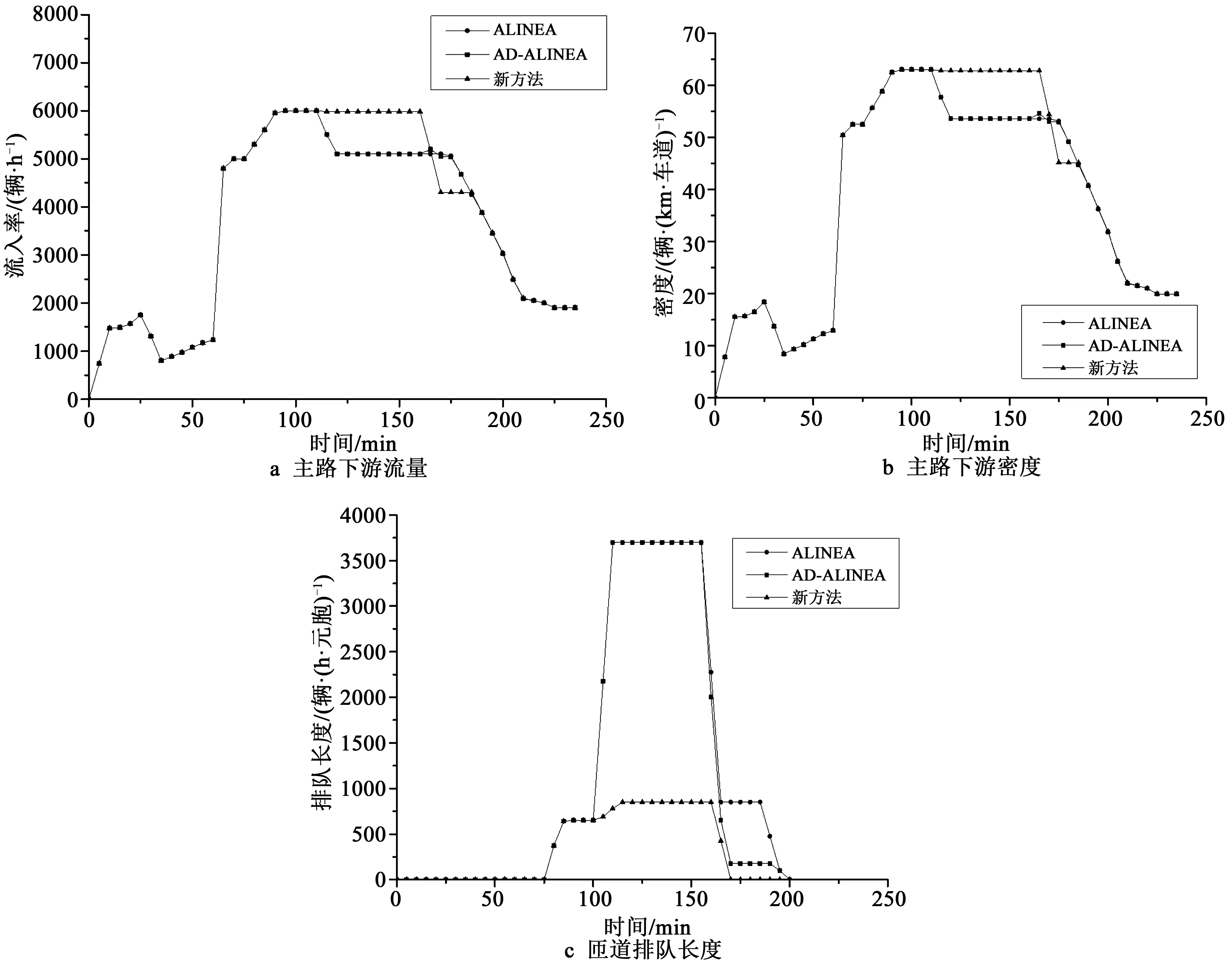
图5 3种控制方法的模拟结果Fig.5 The simulation results for three on-ramp metering methods
3.2 结果分析
由图5可以看出,主路下游密度与流量随时间变化的趋势与交通需求随时间变化的趋势是一致的。由图5中的a和b可以看出,ALINEA与AD-ALINEA控制方法所得到的主路下游的密度、流量基本一致,只是在165 min时AD-ALINEA的流量比ALINEA稍高些。小于100 min,三种控制方法无明显差别,在100~165 min区间高峰交通需求的情况下,新的控制方法所获得的主路下游的流量明显比其他两种方法高,在165~175 min区间,新的控制方法所获得的主路下游的流量明显比其他两种方法低。
为了验证本文提出的方法的有效性,本文还将3种方法产生的匝道排队长度进行了对比,如图5c所示。从图中可以看出,由于低交通需求的原因,在100 min之前,排队约束不起作用,三种控制方法基本不存在差别,而在100~200 min之间快速路与匝道交通需求都较高的时段,新的控制方法产生的排队长度明显比其他两种方法低。在170~190 min之间,AD-ALINEA的排队长度明显低于ALINEA.
将图5中的a、b、c综合进行分析,可以发现与其他两种方法相比,新的方法流量较低时,其匝道排队长度也较低,流量稍微降低也许就是保证较低匝道排队长度所要付出的代价。但总体来看,实施新的控制方法后,主路下游的流量仍然很高,同时匝道排队长度很低。由此可见,将AD-ALINEA与排队约束相结合,既保证了主路下游的流量,又同时兼顾了匝道与快速路车辆的公平性,保证了通过匝道与快速路相连的普通道路的交通。
4 结论
本文将入口匝道排队长度对整体路网交通的影响考虑在内,提出了一种基于AD-ALINEA 的入口匝道控制方法。该方法降低了匝道排队长度,避免了入口匝道上排队过长的现象,保证了与快速路相连的其他道路的交通,提高了整体路网的公平性。但该方法会使得主路下游流量稍有下降,在整体路网公平性极大提高的同时使得路网的效率略有降低。今后,可以考虑对AD-ALINEA 与排队控制加权以求取匝道调节率,使整体路网的效率和公平得到最大程度的兼顾。