全颈椎三维有限元模型的建立及旋转牵引疗法研究*
2018-10-18刘治华汤清陶德岗张新民杨孟俭
刘治华,汤清,陶德岗,张新民,杨孟俭
(郑州大学机械工程学院 河南 郑州 450001)
1 引 言
由于手机和电脑的普及,颈椎病已经不是老年人的“专利”,大学生和白领等人群患颈椎病的人数正在逐年上升。经过调查统计,发现目前部分高校大学生出现颈椎病症率高达79.4%[2]。颈椎牵引是目前颈椎病预防及前期治疗最普遍的方法。目前市场上最常见的有珑抬头、四头带悬吊式等(应用颌枕牵引带)设备,这些设备都采用直线式牵引方式。这种直线式牵引方式与维持颈椎的生理弧度的治疗目标相违背[3],而且使颈椎后方的软组织伸展量过大[4]。在牵引力增大时,会进一步破坏颈椎生理弧度,加剧了颈椎及周围的软组织的协调失恒,使炎性反应加剧。而且颌枕带对下颌关节及耳周颈部的挤压,也会造成患者不适(据相关文献[5]报道,持续的颌枕带式牵引,患者会出现脸庞、下颌、耳郭局部疼痛、张口困难,有时还会出现头晕、恶心、肢体麻木等不适)。
本研究为一种电动颈椎牵引设备的开发提供理论指导。该牵引设备采用颅枕环固定头部,颅枕环从前额环绕至枕骨,连接双侧枕外隆凸、顶骨隆凸、乳突,以颅骨生理弧度凸凹处为受力的支点,并在前额用软织物连锁固定。该设备驱使头颅随着颅枕环完成各方位活动,故本研究所建模型为颅骨和全颈椎模型。研究过程当中,运用有限元方法对颈椎有限元模型进行受力分析。得到旋转牵引时,在相同牵引力作用下,不同的旋转角度对椎间盘的影响,以及旋转牵引时颈椎间盘轴向变形的规律,从而为电动颈椎牵引设备的开发提供依据,并为针对性治疗提供指导。
2 材料和方法
2.1 样本来源
征集一名健康无颈椎病史的成年男性志愿者,其具体信息如下:年龄35岁,汉族,身高180 cm,体重70 kg。利用64层螺旋CT扫描机连续扫描该志愿者的颈椎,共获得342幅二维断层CT图像,扫描数据以DICOM格式直接保存。
2.2 试验设备
计算机硬件:i7处理器,16 G内存,NVIDIA Quadro k2000显卡, Windows 7操作系统。计算机软件:医学图像处理软件Mimics 17.0,Geomagic Studio 13.0,CAE应用软件Hypermesh 13.0,有限元软件 ANSYS Workbench 15.0。
2.3 颅骨及全颈椎C1~7三维有限元模型建立及验证
2.3.1颅骨及全颈椎C1~7三维有限元模型建立 用Mimics 17.0读取DICOM格式的颈椎CT图片数据,阈值界选226~3071 Hu拾取边界。应用软件的处理功能,将各节段椎骨连接部分手动分离并进行空洞填补,计算生成颅骨及全颈椎3D模型并优化,以.stl格式数据保存。将模型导入到Geomagic 13.0,利用搭桥的方法在两段椎骨间逆向生成颈椎间盘[6]。并将模型转化为NURBS曲面模型。通过上述步骤将椎骨和椎间盘模型实体化,并转化成CAD模型,以.iges格式保存。用Hypermesh软件打开上述模型,进行模型导入和几何清理。检查各个椎骨和椎间盘的封闭性并消除自由边,然后进行网格划分,并检查网格质量。皮质骨建立为SHELL181壳单元,松质骨建立为SOLID185单元。利用Hypermesh软件建立1D单元(link180单元)来模拟韧带,并附上单元属性让此单元只承受拉力不承受压力和剪切力的特性。在Hypermesh中对建立的模型赋予单元类型和材料属性[7-9],见表1。将所建模型以.cdb格式保存。在ANSYS经典版中打开模型,进行重写并输出;最后将模型导入ANSYS Workbnech 15.0中,约束C7~T1椎间盘下表面的6个自由度作为边界条件。本模型共653455个节点,3034964个单元。模型见图1,所建C2~3 、C3~4、C4~5、C5~6和C6~7椎间盘厚度分别为9.75、9.38、10.68、8.33和8.74 mm。
2.3.2颅骨及全颈椎有限元模型的有效性验证 为了确保仿真模拟过程中,椎间盘与椎骨、韧带和椎骨之间始终保持稳定连接,防止模型在仿真过程中产生导致仿真计算失效的相对位移,故将椎骨与韧带、椎骨与椎间盘之间的接触类型均定义为绑定接触[6,10]。在颅骨上表面逐步施加1.5 N·m的扭矩,分别模拟人体颈椎的6种基本运动。根据参考文献[11]的方法测算仿真模型的各功能节段的相对活动度(range of motion,ROM)。在相同的条件下,将测算结果与已发表文献的数据进行比对验证。
表1各模型的单元类型和材料属性

Table 1 Unit type and material attribute of each model
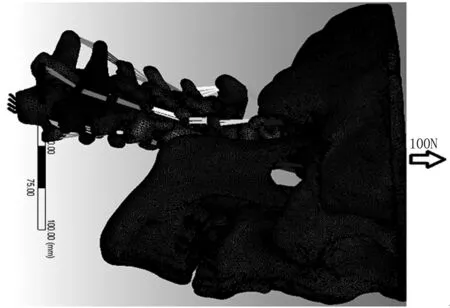
图1 颅骨及全颈椎三维有限元模型
Fig1Thethree-dimensionalfiniteelementmodeloftheentirecervicalspinewithskull
2.3.3旋转牵引仿真研究 本研究主要针对一种新型的坐式电动颈椎旋转牵引装置进行研究,旋转牵引前,先按摩一段时间使颈椎周围的组织放松,然后再进行旋转牵引治疗。刘艳娜等[12-13]提到,在临床治疗中,坐式动态角度颈椎牵引可以提高患者的治疗效果,能够有效缩短颈椎病患者恢复正常的时间以及接受治疗总时间。本研究选取旋转牵引的前后左右四个特殊的方向,代表一周。在牵引角度范围的确定上,颈椎外科学[14]中提到,健康人颈椎的活动范围为前倾、后伸各为35~45°,左屈右屈各为45°,左右轴向旋转各为60~80°。高楚荣等人[15]的研究得出结论,前倾角度超过30°颈椎牵引时,作用在沿颈椎方向的力减少,垂直于颈椎方向的力增加,颈椎的平衡难以保持;前倾的情况下,在15~20°牵引时,颈椎运动的轴心方向与牵引力方向一致,此时拥有最佳的治疗效果。故选定牵引角度范围如下:前倾0~20°(规定角度为正),后伸0~20°(规定角度为负),左右侧屈0~40°(规定左屈角度为负,右屈角度为正)。因左右数据较多,故左屈仿真用奇数角度,右屈用偶数角度。在牵引力大小确定上,姜瑛等人[16]认为,牵引力大小为患者体重的15%~20%时,牵引效果最好。本研究志愿者的体重为70 kg,因此对该模型的颅骨顶部平面施加100 N的牵引力[5]。固定C7~T1椎间盘下表面,通过改变牵引角度及方位,进行仿真求解。
3 结果
3.1 颅骨及全颈椎有限元模型的有效性验证
本研究得到的C0~1、C1~2、C2~3、C3~4、C4~5、C5~6和C6~7的运动范围ROM与文献[17-19]比较结果见表2~4。
表2屈伸下本模型ROM与已发表文献数据比较
Table2ComparisonofROMbetweenthisstudymodelandthepublishedliteratureunderforwardandbackwardextension
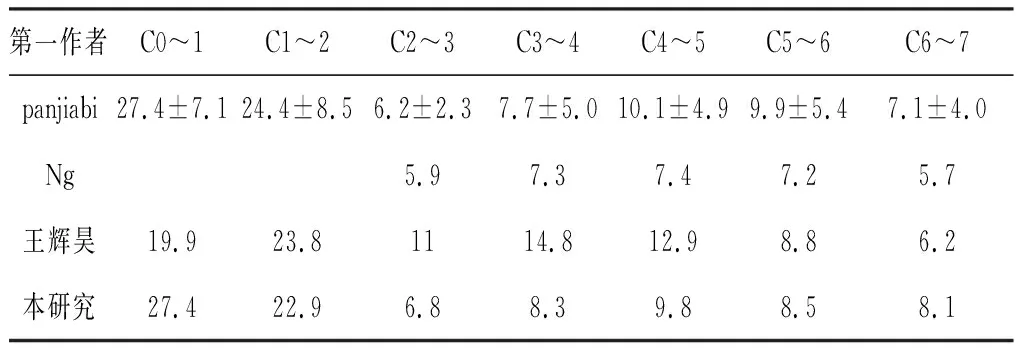
第一作者C0~1C1~2C2~3C3~4C4~5C5~6C6~7panjiabi27.4±7.124.4±8.56.2±2.37.7±5.010.1±4.99.9±5.47.1±4.0Ng5.97.37.47.25.7王辉昊19.923.81114.812.98.86.2本研究27.422.96.88.39.88.58.1
表3侧曲下本模型ROM与已发表文献数据比较
Table3ComparisonofROMbetweenthisstudymodelandthepublishedliteratureundersidebending
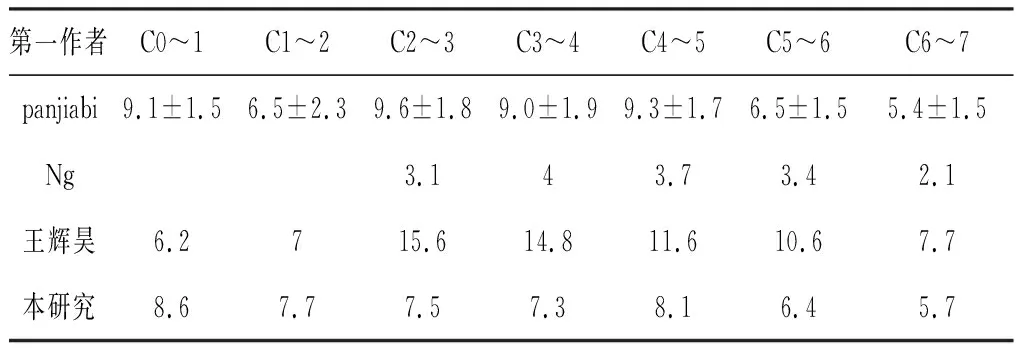
第一作者C0~1C1~2C2~3C3~4C4~5C5~6C6~7panjiabi9.1±1.56.5±2.39.6±1.89.0±1.99.3±1.76.5±1.55.4±1.5Ng3.143.73.42.1王辉昊6.2715.614.811.610.67.7本研究8.67.77.57.38.16.45.7
表4轴向旋转下本模型ROM与已发表文献数据比较
Table4ComparisonofROMbetweenthisstudymodelandthepublishedliteratureunderaxialrotation

第一作者C0~1C1~2C2~3C3~4C4~5C5~6C6~7panjiabi9.9±3.056.7±4.83.3±0.85.1±1.26.8±1.35.0±1.02.9±0.8Ng56.16.66.74.9王辉昊19.929.811.813.68.89.57.8本研究14.133.43.44.95.94.23.5
由表2和3可见,本研究的模型与参考文献中的活动度ROM角度在屈伸和侧屈时无明显差异,C7~T1未比较。
由表4可见,本研究的模型在轴向旋转时,C0~2的ROM角度略有差异,C2~3、C3~4、C4~5、C5~6和C6~7无明显差异,C7~T1未比较。故该模型可进行旋转牵引的仿真。
3.2 旋转牵引仿真研究
3.2.1旋转牵引过程中各颈椎间盘轴向(Z)变形的变化 不同方位不同角度下各节段颈椎间盘Z方向上的轴向变形变化见图2。从图中可以看出,其他条件不变的情况下,随着颈椎牵引角度增大,各个节段的颈椎间盘也随之发生了相应的变化。前倾情况下颈椎间盘Z方向的轴向变形逐渐变小,当牵引角度大于18°时,牵引的变形量会很小,故牵引角度可以控制在20°以内即可。后伸和左右屈曲,随着牵引角度的绝对值增大,各个颈椎间盘的轴向变形也会跟着逐渐增大。

图2各椎间盘轴向变形(Z)
(a).前倾;(b).后伸;(c).左屈;(d).右屈
Fig2Axialdeformationofintervertebraldiscs(Z)
(a) .Bendingforward;(b).Bendingbackward;(c).Bendingleft;(d).Bendingright
表5各方位各颈椎间盘的变形幅度
Table5Thedeformationamplitudeoftheintervertebraldiscinalldirections

C2~3(%)C3~4(%)C4~5(%)C5~6(%)C6~7(%)中立0°27.725.52023.620前倾20°6.25.95.36.66.5左屈20°58.351.736.839.433.140°130112.878.87859.6后伸20°77.368.45167.341.8右屈20°54.850.239.344.134.740°125111.183.38662.5
从图2和表5中可知,后伸和左右屈曲时,变形量过大,故实际牵引角度不宜太大,同时为避免变形量过大,当牵引角度增大到一定数值时,应该适当的减小牵引力。前倾时,可以适当的增大牵引力。同时上颈椎椎间盘的变形幅度比下颈椎椎间盘的变形幅度要大。
颈椎旋转治疗,其旋转方位顺序依次为前倾、左屈、后伸、右屈和前倾。从表5中可见,在同一牵引角度下完成前倾,左屈,后伸,右屈,再前倾这样转一周,变形量是由小变大再变小。
3.2.2旋转牵引过程中各颈椎间盘最大应变的变化 见图3和4,颈椎间盘在牵引角不变,牵引力不变,随着方位前倾,左屈,后伸,右屈,再前倾这样旋转一周,其最大的应变也随着变化。最大应变在旋转的过程中,由小变大再变小这样一个循环的过程。
变角度牵引可以使椎间隙和椎间孔增大,使突出的椎间盘回纳[20]。在旋转牵引的过程中,其Z轴方向上的轴向变形和最大应变由小变大再变小的循环过程,相当于一个间歇式牵引,一定程度上改变了椎间盘内相对压力的变化。
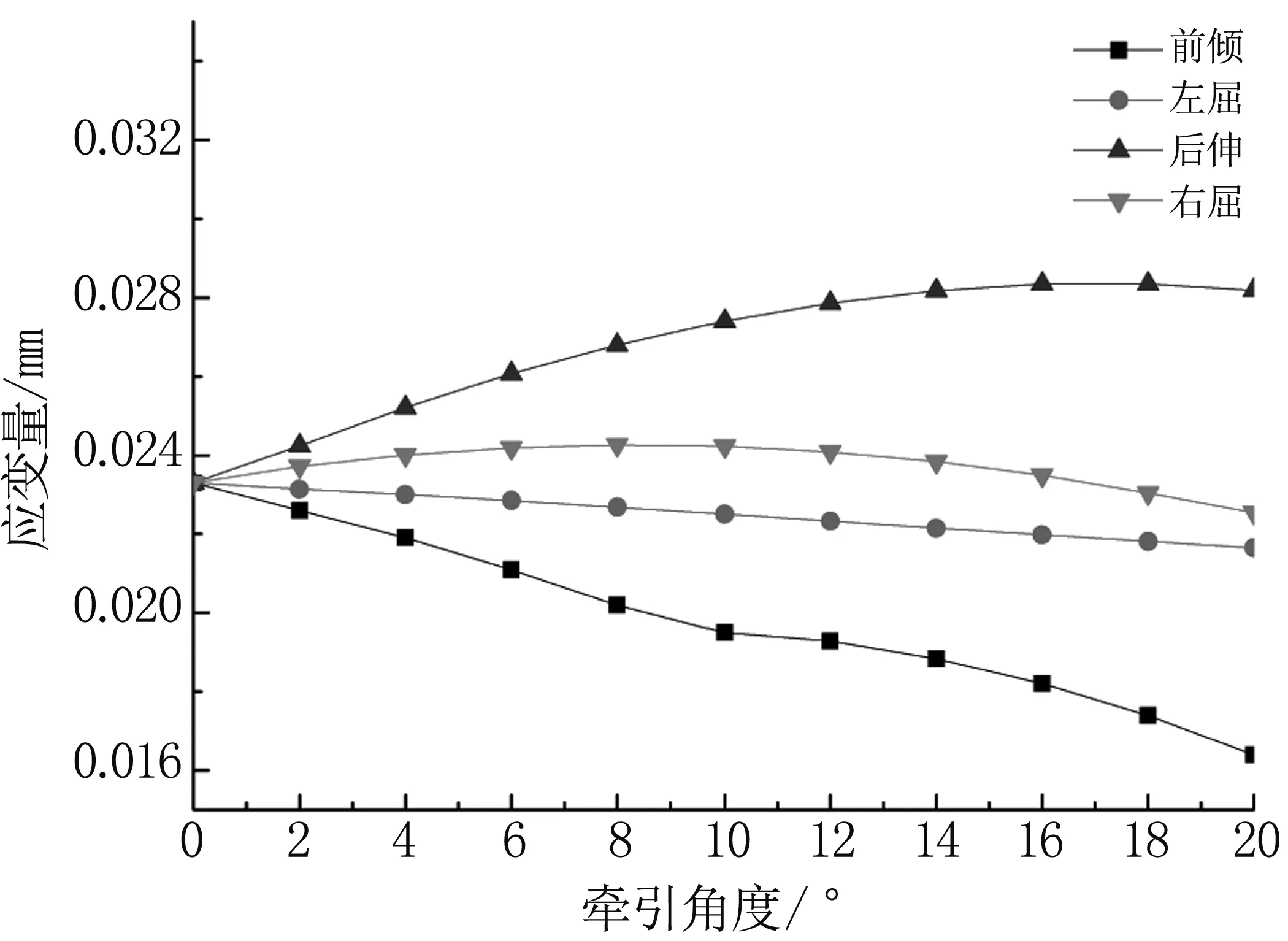
图3 C2~3不同方位下的最大应变

图4 C3~4不同方位下的最大应变
4 讨论
近年来,有限元技术在现代骨科生物力学研究中应用广泛。有限元方法可以通过划分网格,布置节点来得到研究人员想要的受力分析方式,对复杂的人体骨骼分析可以做到人性化和高效化,目前在脊柱生物力学研究中日益受到重视。本研究根据正常人体的颈椎CT扫描数据建立了有效的三维有限元模型,该模型包括颅骨模型,把牵引力加载在颅骨上更加贴近实际牵引时人体的受力状况。同时,韧带组织在生理上的力学特性为只承受拉力,不承受压力和剪切力,本模型在Hypermesh软件中添加了Link180 单元很好的满足了这一要求。但是该模型也存在着不足之处,如本研究并未建立肌肉、关节等组织模型,颈椎材料仅定义为线弹性材料,实际上颈椎周围组织成分复杂,为粘弹性材料(非均质、各向异性),故该有限元模型有一定的局限性。由于加载力未在正中位置,左右韧带未做到完全对称,所以造成左右的结果有一定的偏差。低周慢速的旋转牵引治疗方法,使得椎间盘Z轴方向上的轴向变形和最大应变有一个由小变大再变小这样一个循环的过程。这在一定程度上改变了椎间盘内压的变化,为新型颈椎牵引治疗系统的开发提供依据。