基于模糊PID控制的变排量液压马达系统仿真
2018-10-18,
,
(北京航空航天大学 机械工程及自动化学院,北京 100191)
0 引言
与典型的定排量液压马达系统相比较,变排量液压马达系统主要的结构不同在于取消了伺服阀,并且用可转动的斜盘及其相关控制代替了固定斜盘。对于定排量液压马达而言,在所有工作状况下,排量是定值,流量和速度成正比例,在高速时需要流量很大。而对于变排量液压马达而言,马达排量要匹配于转矩需求,因此,在变负载工作条件下,变排量液压马达系统流量需求得以减小。除了减少流量消耗,变排量液压马达系统还可以减少能量消耗、减小供油设备的尺寸和重量以及配电系统容量等。同时,由于其响应快,为提高机动性和战场生存能力提供了保证[1]。变排量液压马达可应用于作战飞机舱门功率驱动系统,实现武器内埋装置,以达到隐身和减小飞行阻力的目的。
随着高性能飞机的发展,大功率大惯量负载的工况越来越多,传统的定排量马达速度调节系统已无法满足驱动装置性能要求,而变排量马达驱动系统组成的容积调速回路因功率损失小(没有溢流损失和节流损失)、效率高(工作压力随负载变化)、响应快、油温低及多工况匹配性能等方面的优势,将在高速、大功率系统有很大的实际应用价值。
由于变排量液压马达伺服系统的非线性特性和负载的变化性,常规PID控制难以取得良好的控制效果。而模糊自整定PID控制将模糊控制与常规PID控制相结合,可以根据工况实时调节控制参数,故采用模糊自整定PID控制方法,运用AMESim和Matlab/Simulink软件对该液压伺服系统进行联合仿真,并与常规PID控制结果进行比较。
1 变排量马达系统组成及工作原理
变排量液压马达根据变量机构的不同可分为单向、双向变排量液压马达[2]。单向变排量马达的变量机构为油缸和弹簧,油缸出力和弹簧弹力作用在马达斜盘两端,平衡时确定斜盘角度位置,从而控制马达的排量。双向变排量马达的变量机构为两个油缸,其出力分别作用于斜盘的两端,通过出力比较控制马达的排量。由于双向变排量马达换向方式简单,本文选择研究双向变排量马达系统,以下简称为变排量马达系统。
变排量液压马达系统的工作原理如图1所示,其主要由以下几个部分组成:油箱(1-2)、过滤器(3)、关闭阀(4)、电磁导阀(5)、压力传感器(6)、流量控制阀(7)、伺服阀(8)、2个液压缸(9)、双向变量马达(10)等。
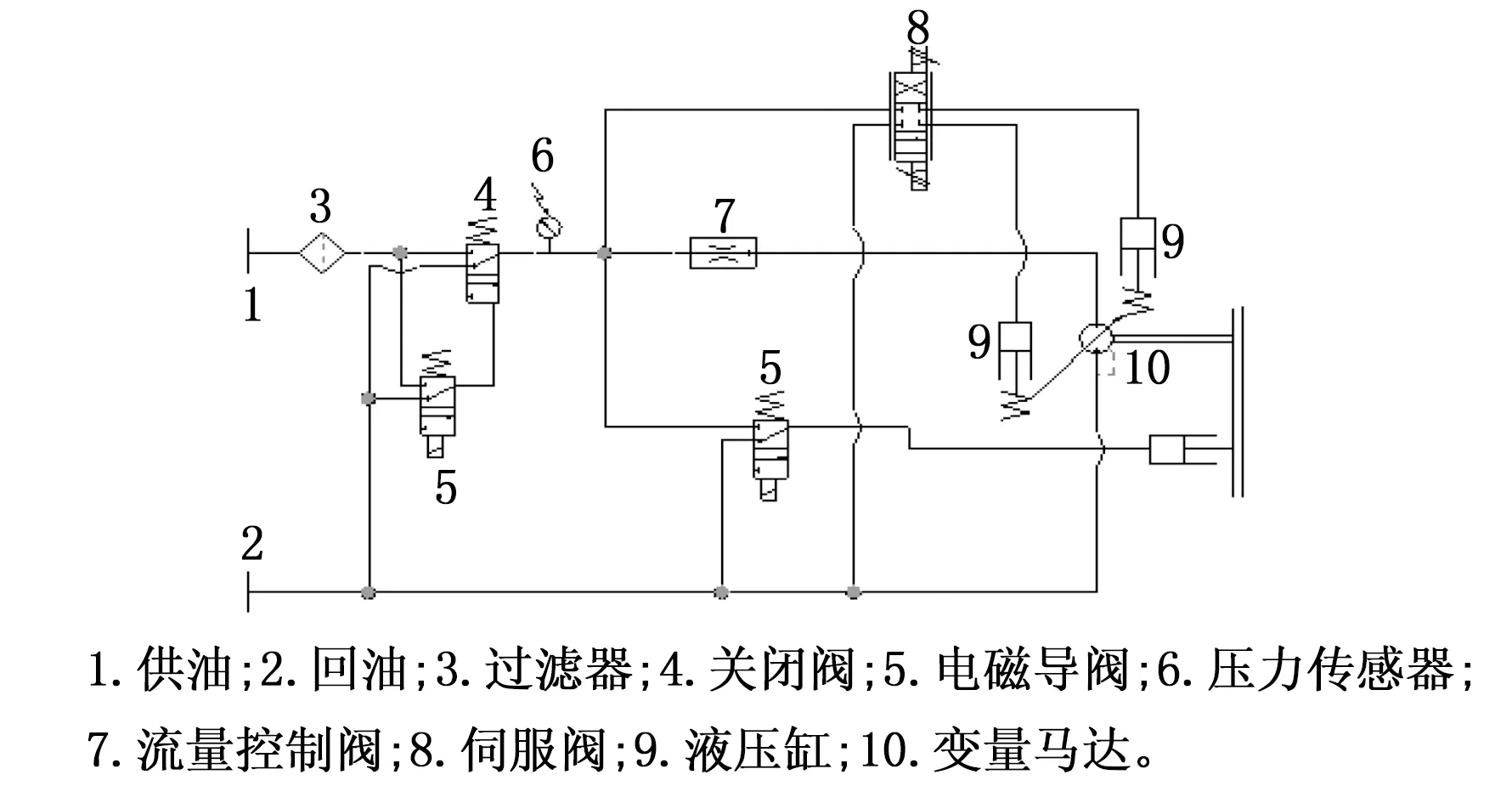
图1 变排量液压马达系统原理图
变排量马液压达系统的工作原理:采用伺服阀控制双向变量液压马达排量的方式,通过调节伺服阀开度的大小调节进入变量油缸的流量,两变量油缸出力相比较,力平衡时马达斜盘倾角位于特定位置,从而控制液压马达的排量。初始位置时,变量油缸在复位弹簧的作用下液压马达排量达到最小位置。由于此系统中,变量油缸的数量为2个,因此可以实现双向变排量。
根据液压马达的转矩公式:
(1)
式中,T为液压马达转矩,Δp为液压马达进出口压差,V为液压马达排量,ηm为液压马达的机械效率。在转矩一定的情况下,Δp变大,则需要的排量越小。与阀控定排量液压马达系统相比,变排量液压马达系统省去了伺服阀上损耗的压降,约为系统压力的1/3,即作用在变排量液压马达上的压差Δp较大,所以变排量液压马达系统需要的流量小于定排量液压马达系统。在转速相同的情况下,排量越小,系统所需流量就越小。
2 变排量马达系统模型建立
2.1 三环控制模型
为了精确实现位置和速度的控制,该液压伺服系统采用斜盘倾角+速度+位置的三环控制方式。三环控制系统如图2所示,角位置传感器向控制器提供变排量液压马达斜盘的角度(即排量)反馈信号,构成马达斜盘角度的位置闭环。转速传感器为控制器提供液压马达输出轴的转速反馈信号,构成液压马达轴的转速闭环。角位移传感器向控制器提供输出的角度位置反馈信号,构成系统输出的角度位置闭环。上述三环控制模型系统中,斜盘角度的位置环是内环,速度环是外环,而输出角度位置控制环则是最外面的大闭环。
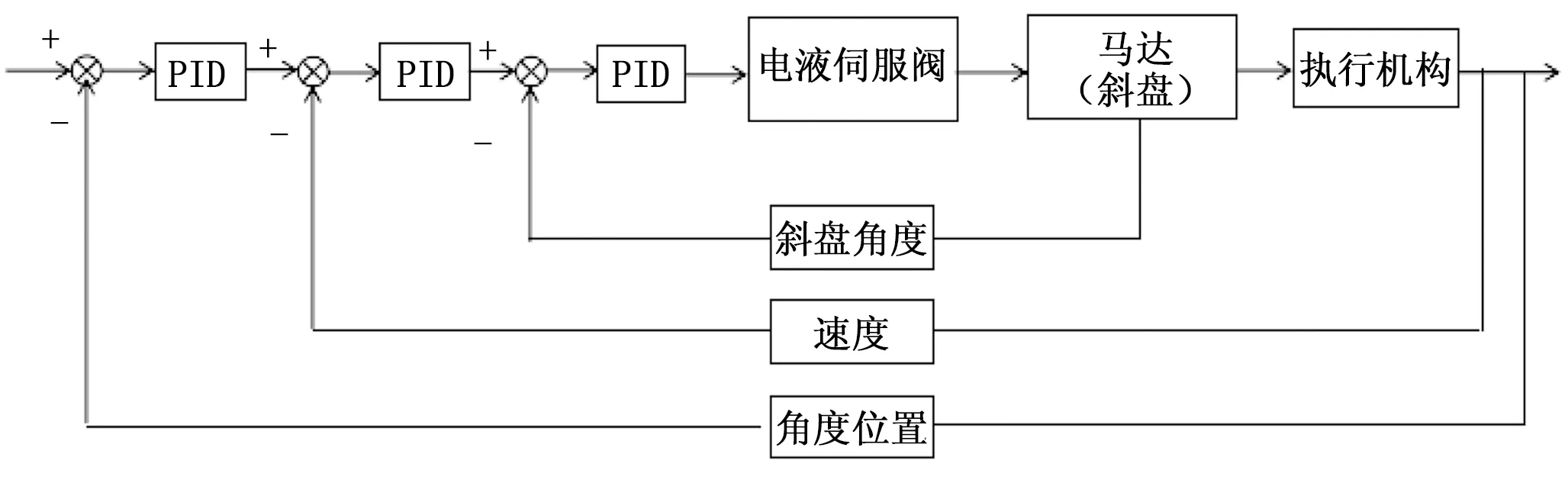
图2 三环控制系统方框图
控制器使用最外环的角位置传感器的反馈信号,给出运动方向和位置的闭环数字控制信号,数字控制信号通过控制器功率放大器变成控制电信号,控制电信号驱动电液喷嘴挡板伺服阀的电马达,控制推动变排量液压马达斜盘执行机构的流量,从而控制变排量液压马达的斜盘角度,而斜盘角度决定了液压马达的排量以及输出扭矩。
2.2 液压伺服系统AMESim模型建立
根据变排量液压马达系统原理图(如图1),结合上小节所述的斜盘倾角+速度+位置的三环控制方式,在AMESim软件中利用信号控制库、液压库和机械库中的元件图标搭建草图,经过选择子模型、设置模型参数等步骤,建立变排量液压马达伺服系统整体模型,如图3所示[3]。其中,控制器的输入信号设定为速度曲线,通过积分转变为角度位置曲线。液压马达输出经过减速箱减速,再将转矩和转速传递到执行机构上,以推动大惯量负载和提高系统的功重比。
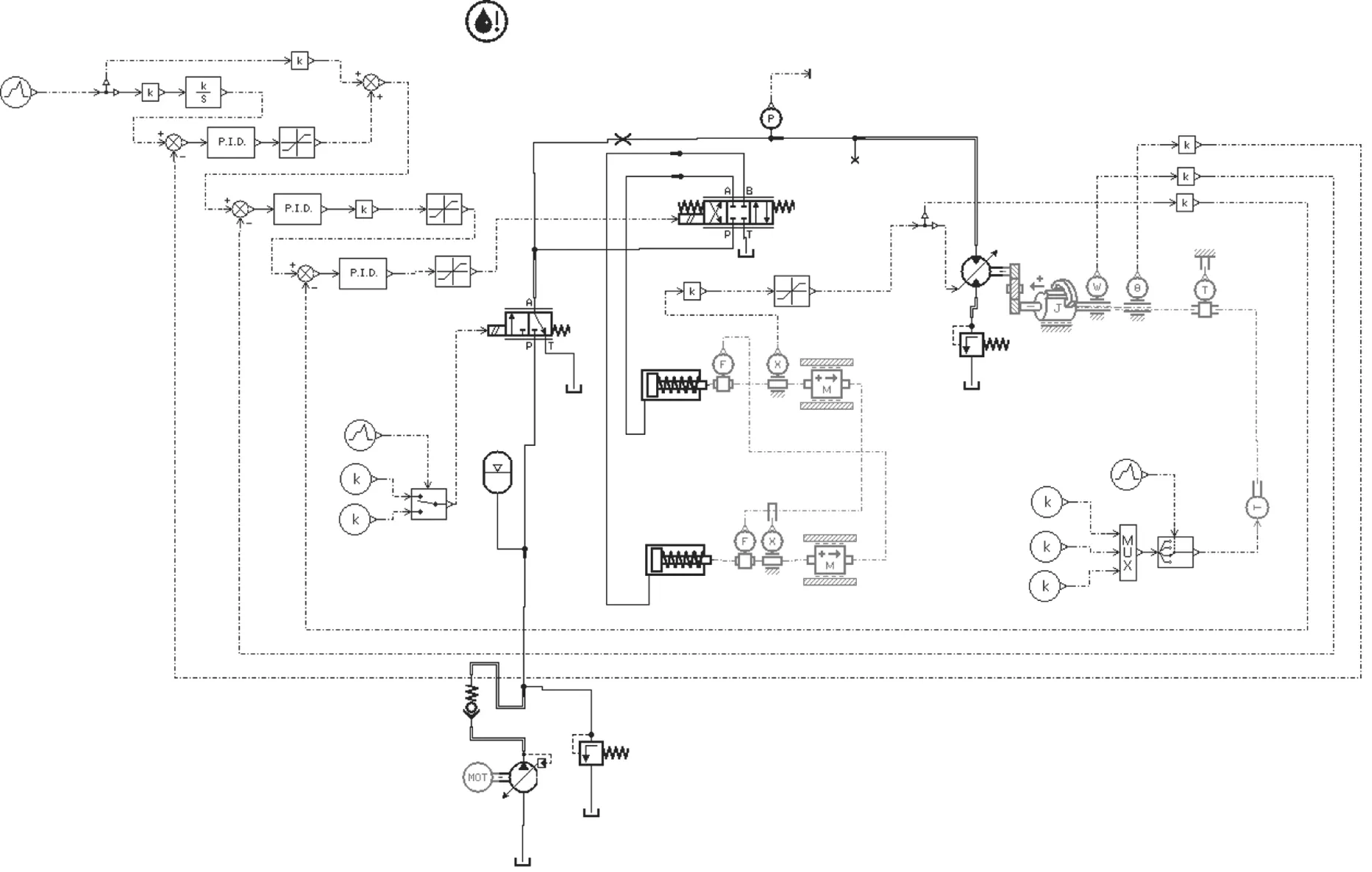
图3 变排量液压马达伺服系统AMESim模型
现将速度控制信号分为三段,即加速段、恒速段和减速段。
3 模糊PID控制器设计
常规PID控制器的控制参数在系统动态响应过程中是固定不变的,不能根据负载的改变进行实时调整,致使液压系统在工作过程中因输出速度波动而造成不平稳性。为解决这一问题,可采用模糊自整定PID控制方法对变排量液压马达系统进行控制。这种方法结合了常规PID控制和模糊控制各自的优势。
3.1 模糊PID控制原理
模糊PID控制器的原理如图4所示,主要由模糊控制器以及PID控制器两个部分组成。模糊控制器主要功能是对PID控制器中的参数进行在线整定,以误差e和误差变化ec作为输入,然后进行模糊化、模糊推理、清晰化,得到三个控制参数的变化量ΔKp、ΔKi、ΔKd。PID控制器接收来源于模糊控制器的控制参数的变化量,并按公式(2)计算得到实时控制值Kp、Ki、Kd,输出控制实际系统。
(2)
式中,Kp0、Ki0、Kd0是PID控制参数初始值。模糊PID控制不会破坏原有的常规PID的控制效果,仅根据系统的跟踪误差对PID控制参数进行增量调节。
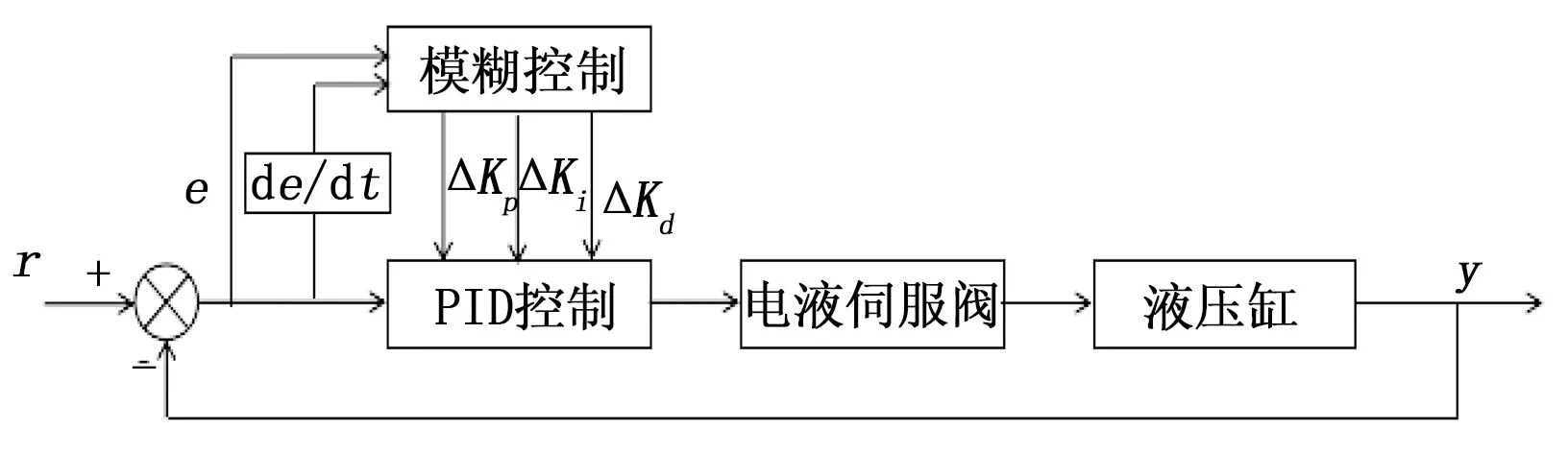
图4 模糊PID控制器原理图
3.2 输入输出变量和模糊化
模糊控制器的输入量为角度位置信号与给定值的误差e和该误差变化率ec,模糊控制器的输出量为调整PID控制器参数的变化量ΔKp、ΔKi、ΔKd。
定义7个模糊子集{NB,NM,NS,O,PS,PM,PB}来描述输入量e、ec和输出量ΔKp、ΔKi、ΔKd的值。在该系统中,模糊控制器的输入、输出变量的隶属函数均采用三角形隶属度函数,如图5所示。三角形隶属度函数灵敏度高、占内存小、运算简单。误差e的基本论域确定为[-7.5,1],误差变化ec的基本论域确定为[-6,6]。观察PID参数的变化范围,可以得到PID的三个参数变化量ΔKp、ΔKi、ΔKd的基本论域均为[-6,6]。
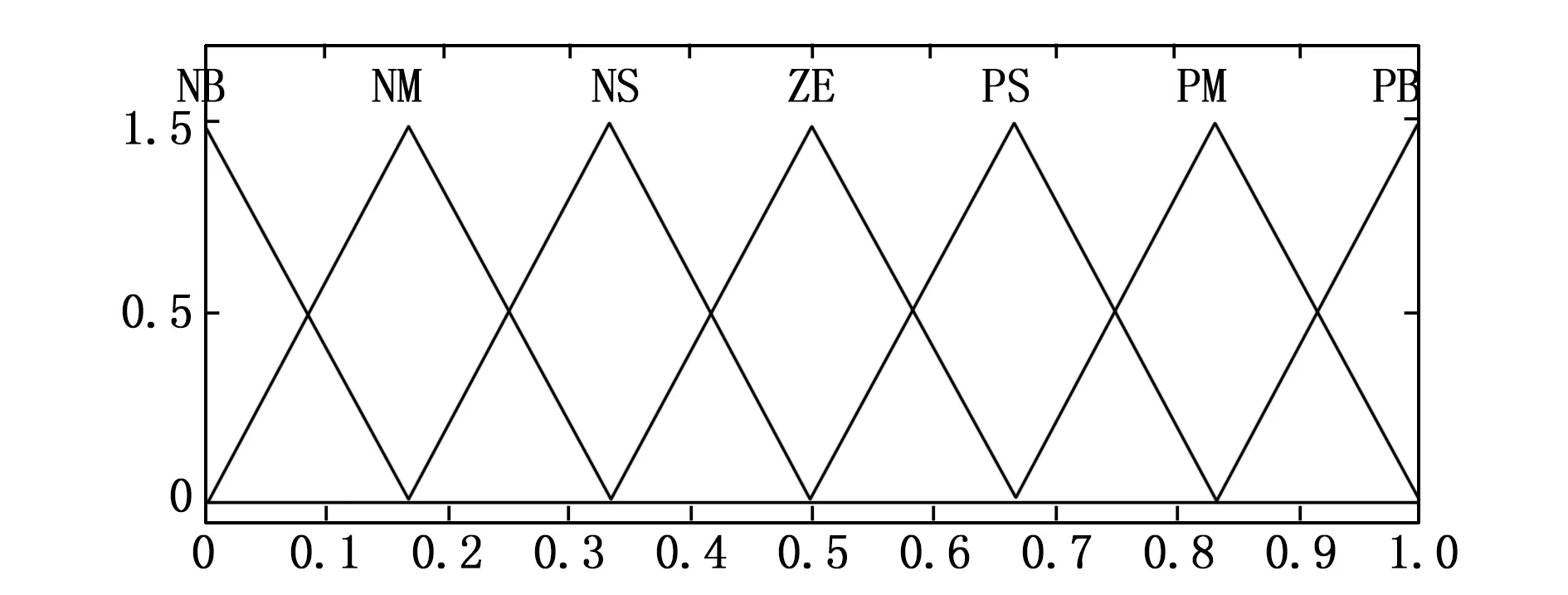
图5 三角形隶属度函数
3.3 模糊控制规则
定义模糊PID控制通过建立输入量(误差e、误差变化ec)与输出量(PID控制参数变化量ΔKp、ΔKi、ΔKd)之间相对应的模糊规则来实现实时调节控制参数的作用。模糊规则的建立需要依据专家和设计者的经验和实际使用时的情况,使控制器按照需要完成控制参数的实时调整。
在PID控制器中,比例环节成比例地反映调节系统的误差信号。增大Kp值,可加快系统的响应速度,减小系统的稳态误差,但Kp值过大会产生较大的超调,甚至使系统不稳定;减小Kp值可以减小超调,提高稳定性,但Kp值过小会减慢响应速度,延长调节时间[4]。因此,当误差偏大时,应取较大的Kp值以提高响应速度,迅速较小误差,而当误差偏小时,Kp值则取较小值,以使系统具有较小的超调并保证一定的响应速度。ΔKp、ΔKi、ΔKd的模糊规则分别如表1、表2、表3所示。
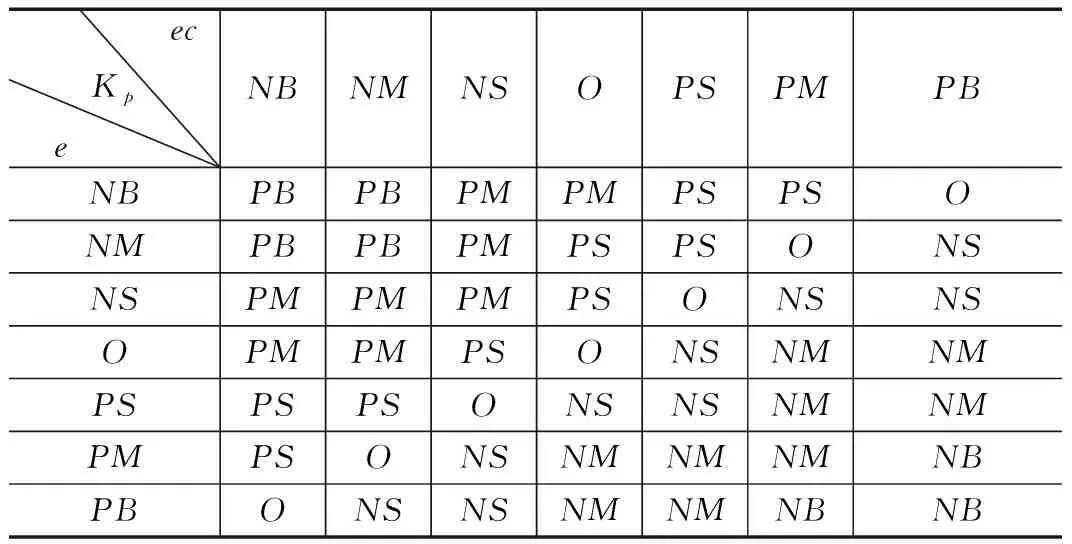
表1 ΔKp模糊规则表
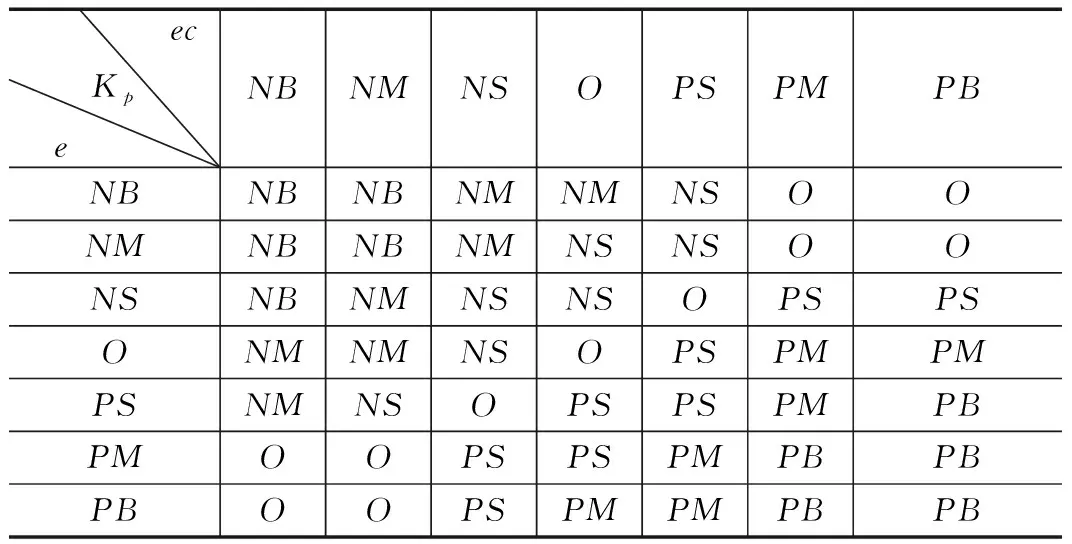
表2 ΔKi模糊规则表
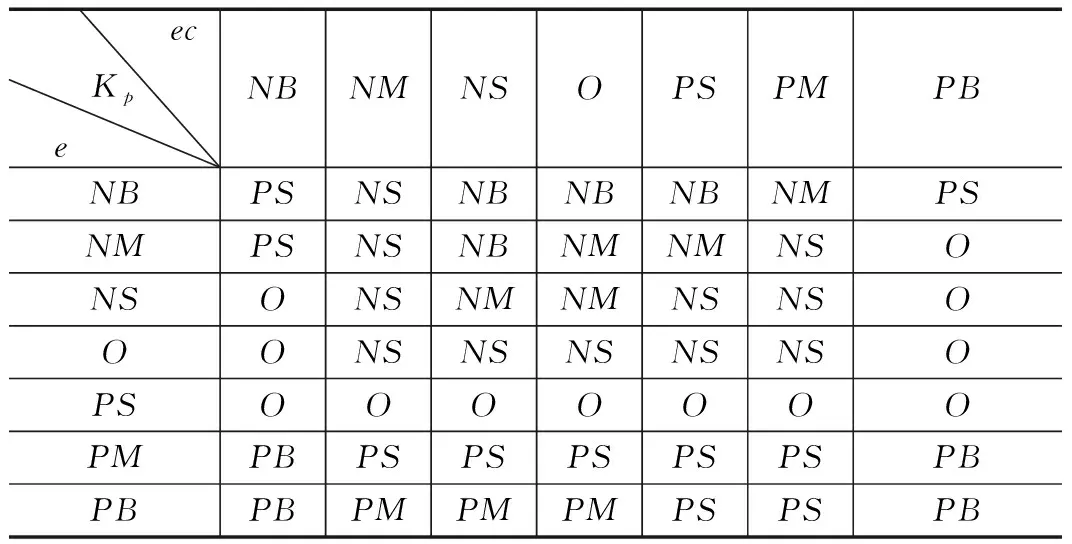
表3 ΔKd模糊规则表
3.4 模糊PID控制算法
为了消除液压伺服系统的非线性和负载参数的时变性的影响,对外环PID参数采用模糊自适应调节[5-8]。利用软件接口将上文中建立的变排量液压马达伺服系统AMESim模型以S-Function模块的形式导入到Matlab/Simulink中,即可建立AMESim和Matlab软件仿真平台,进行联合仿真。在Matlab软件的Fuzzy Logic Design工具箱中进行模糊控制器设计,然后与PID控制器进行联接,即可完成模糊PID控制器模型的搭建[9]。基于模糊PID控制的变排量液压马达伺服系统模型如图6所示。其中,PID控制器的内部结构如图7所示。
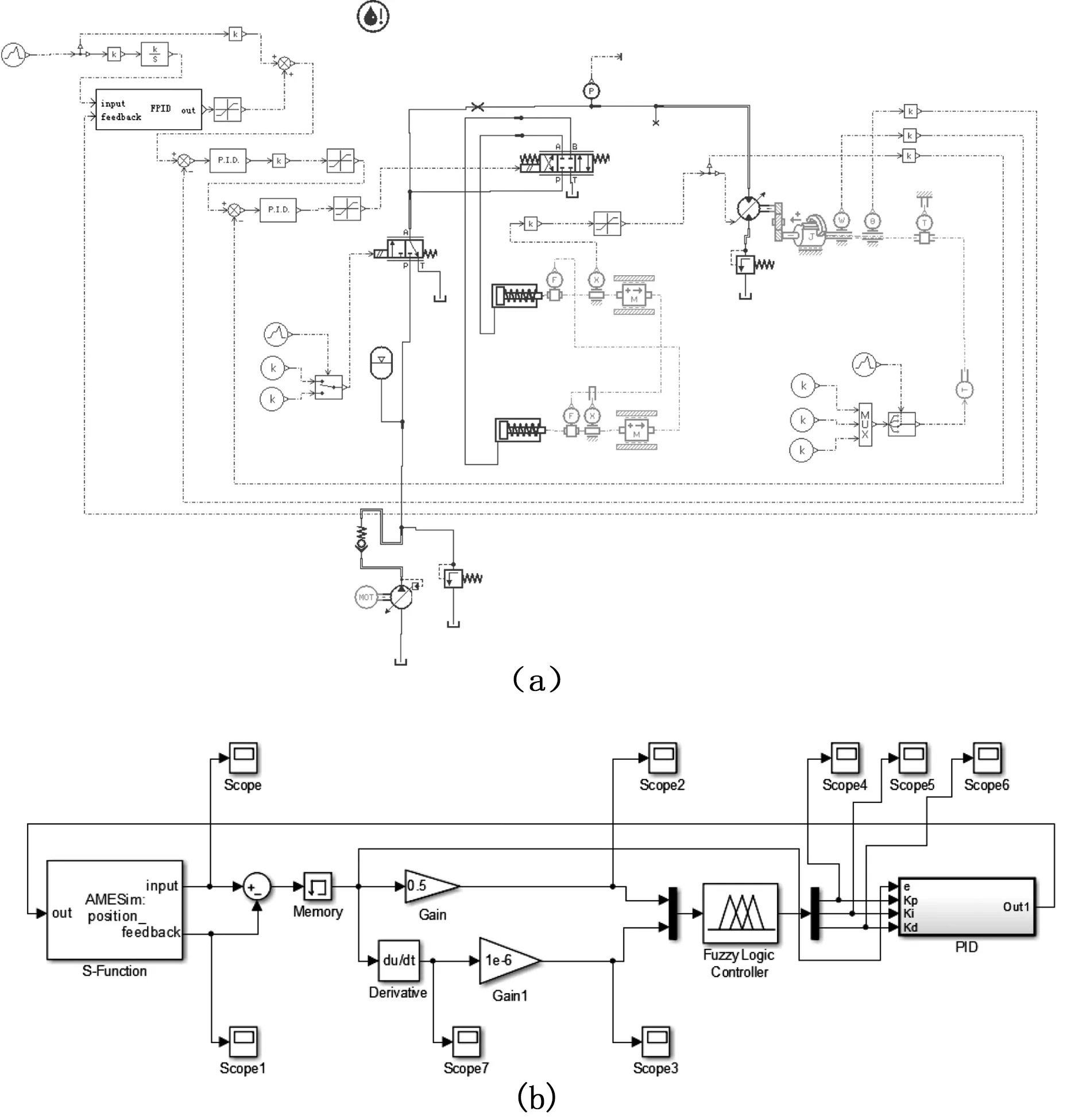

图6 基于模糊PID控制的变排量液压马达伺服系统的模型
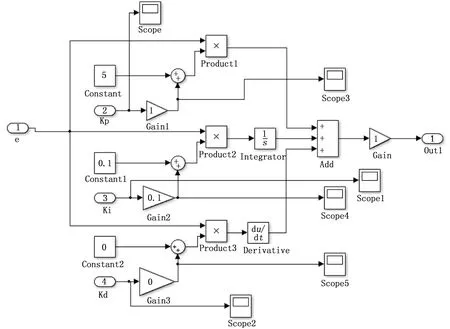
图7 控制器内部结构
4 模糊PID控制系统仿真分析
4.1 仿真步骤
AMESim软件有4种工作模式:草图模式(Sketch mode)、子模型模式(Submodel mode)、参数模式(Parameter mode)、仿真模式(Simulation mode)。该模糊PID控制系统仿真步骤如下:
1)在草图模式下搭建草图,主要利用信号控制库、机械库和液压库这三个元件库对系统进行建模;
2)搭建好模型后进入子模型模式,选择首选子模型按钮赋予各个元件数学模型;
3)进入参数模式,设置液压泵、伺服阀、液压马达、液压缸等各模型参数;
4)进入仿真模式,先设置运行参数,最终时间(Final time)为2 s,输出间隔(Print interval)为1 ms;
5)选择Tools下拉菜单中的“Start AMECustom”按钮以运行Matlab/Simulink进行联合仿真;
6)根据模糊PID控制原理,在Simulink中进行模糊PID控制器建模;
7)在Simulink中点击开始仿真按钮以运行仿真。
4.2 仿真方法
采用AMESim软件和Matlab/Simulink软件联合仿真的方法,通过结合AMESim强大的液压系统建模仿真功能和Matlab中模糊逻辑设计(Fuzzy Logic Design)功能,实现基于模糊PID控制的变排量液压马达系统仿真。
AMESim与Simulink的联合仿真是通过AMESim中创建接口图标功能和Simulink中的s函数实现连接的。具体实现过程是AMESim中通过系统编译、参数设置等生成的系统模型作为供Simulink使用的个s函数,在Simulink 中得到普通S函数的同等对待。仿真过程中AMESim将自动生成与存储的文件名一致的动态链接文件,该文件为Matlab S函数格式,供算法中的S函数调用,借助接口模块实现了两者的联合仿真。
首先建立联合仿真模型,然后分析各敏感参数对系统性能的影响,根据仿真结果,对马达参数和控制器控制参数进行优化,然后再次进行仿真分析,最后得到满足性能要求的控制方法和参数。
4.3 仿真结果分析
考虑到该液压系统受顺、逆载作用的情况(顺载是指作用方向与物体运动方向相同的力,逆载是指作用方向与物体运动方向相反的力),负载曲线如图8所示,负载在0~1 s为10000 Nm,在1 s末发生从10000~-10000 Nm的跳变,在1~2s为-10000 Nm。规定负载为正值时,即为逆载;负载为负值时,即为顺载。
在控制器输入速度信号为如图9所示梯形信号(1号线)的条件下对系统进行了仿真,速度控制信号分为三段,即匀加速段、恒速段和匀减速段。常规PID控制策略控制下得到了如图9(2号线)所示的仿真结果,模糊PID控制策略控制下得到了如图9(3号线)所示的仿真结果。从仿真曲线可以看出,在常规PID控制下,负载发生突变前,速度反馈信号跟踪效果较好,负载由正到负发生剧烈变化,此时,顺载带动输出轴转动,速度快速变大,此后系统震荡无法收敛,即控制失效。而模糊PID控制策略在此过程中仍可取得较好的控制效果,仅在负载突变时产生短暂的波动峰值,之后能够很快恢复并且跟踪信号可以跟上给定信号。通过对比分析,可见模糊PID控制策略实现了对PID参数的实时调整,可根据负载变化进行在线调节,与常规PID相比在响应速度和平稳性等方面有着显著的优势。
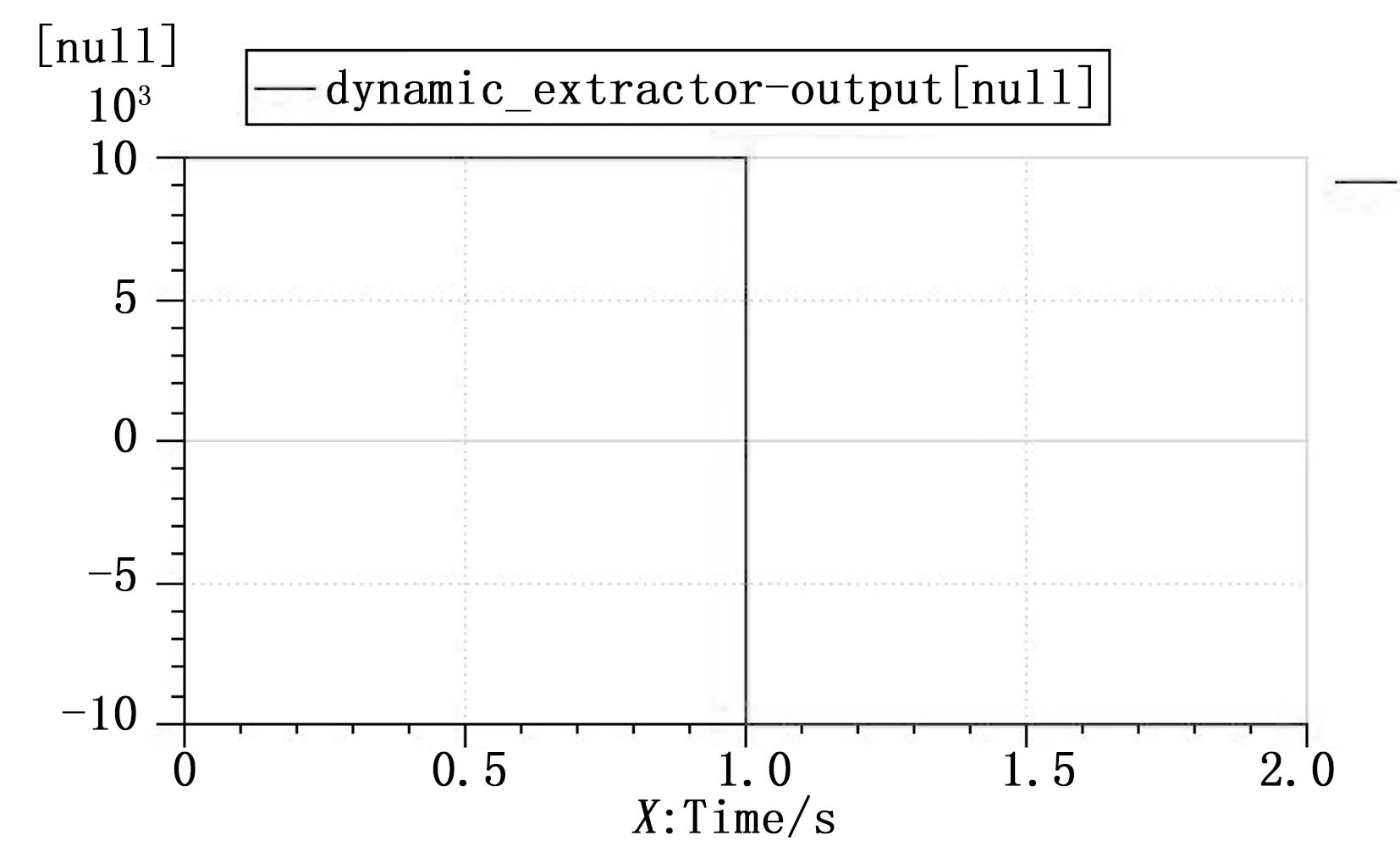
图8 负载跳变曲线
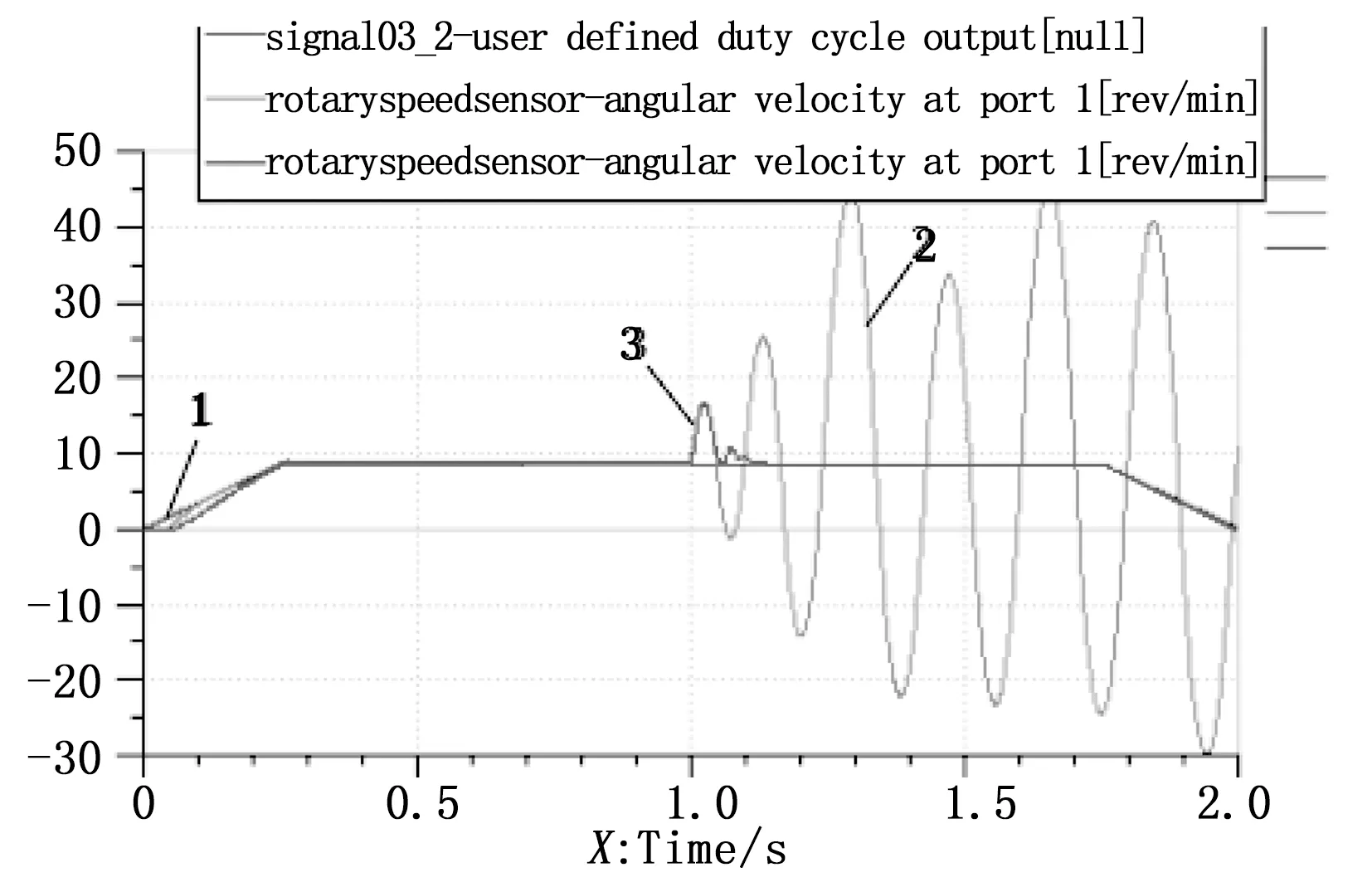
图9 给定信号和常规、模糊PID控制输出曲线
5 结论
为了实现变排量液压马达伺服控制系统在变负载工况下既能满足快速响应的要求,又能兼顾系统输出的平稳性,本文采用了能够实时调节控制参数的模糊PID控制算法,并运用AMESim和Matlab/Simulink对该系统进行联合建模仿真。仿真结果表明,与常规PID控制相比较,模糊PID控制能够显著改善变负载条件下伺服系统的不平稳性,提高系统的响应速度。