基于反演法的严格反馈非线性系统模糊自适应约束控制
2018-10-15宗学军吴振强
宗学军, 吴振强
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
严格反馈形式的非线性系统控制研究吸引了越来越多研究者的关注,系统输出的跟踪控制问题是工业领域中一个重要又实际的研究课题[1].然而实际系统的非线性特性以及不可避免的不确定性因素的存在对系统的输出跟踪都能造成巨大影响,因此对于这类不确定非线性系统的跟踪控制问题研究具有非常重要的现实意义.基于反演(backstepping)法的自适应控制已研究多年,其有效解决了一类不确定非线性系统的自适应控制问题.它从系统最低阶微分方程开始,在每一步的设计过程中引入虚拟状态和虚拟控制,并在最后一步设计出实际控制律[2-3].另一方面,传统的自适应控制技术还不能完全解决非线性系统中出现的能够影响控制系统性能的极为复杂的不确定性.因此,利用模糊逻辑系统的万能逼近性能去辨识系统中的不确定项是一种新的方法[4-7].
性能约束问题一直是许多工业控制系统中最重要的研究课题之一,它可以防止系统遭受损坏.其主要思想是在保证系统稳定的前提下还可以满足系统的暂态和稳态性能.近年来,约束控制方法的研究已经取得了一些进展[8-11].其中预设性能控制(prescribed performance control,PPC)方法的关键就是采用一个转换函数把原始系统的误差转换成一个新系统的新误差.而这个转换函数的逆变换则被作为设计自适应控制器的一个变量.只要转换后的误差系统稳定,系统的跟踪误差就会保持在预设的误差边界之内[7].
基于以上分析,本文考虑一类严格反馈非线性系统的自适应跟踪约束控制问题.结合模糊逻辑系统解决了系统中的不确定项.设计了一个新的约束变量来保证非线性系统的暂态和稳态性能.利用Lyapunov方法,证明闭环系统中的所有信号都是半全局一致最终有界的,且跟踪误差可以收敛到原点附近的一个较小邻域内.
1 问题的描述
1.1 系统描述
考虑如下的不确定严格反馈非线性系统:
(1)

引理1[12]如果F(Z)被定义为密集ΩZ上的连续函数,则存在模糊逻辑系统WTQ(Z),其能够以一个理想的精度ε>0去逼近任何连续非线性函数,使得
(2)
其中:W=[w1,w2,…,wn]T是理想的权值向量;Q(Z)是基函数向量.

1.2 约束变量
预设性能边界函数Bψ(t)的定义如下:
Bψ(t)=(ρ0-ρ∞)e-βt+ρ∞,
(3)
其中:ρ0是边界函数Bψ(t)的初始值;β是指数函数的收敛度;limt→∞Bψ(t)=ρ∞.ρ0,ρ∞和β是预设定常数.
定义跟踪误差e1=ξ1-yr,其中yr为已知的有界的跟踪信号,且它的导数也是已知有界的.在自适应模糊控制器的反演设计过程中,提出一种新的约束变量,其定义如下:
(4)
对ι1求导可以得到:
(5)
2 自适应模糊控制器设计
采用反演技术设计自适应控制器,首先设计虚拟控制信号αi和实际控制输入u:
i=2,3,…,n
(6)

(7)
ci为未知常数,后面将给出Wi.在该控制器设计中采用了反演方法,虚拟状态变量定义为:
zi=ξi-αi-1,i=1,2,…,n,z1=e1,α0=yr.

i=2,3,…,n-1
(8)
自适应律的定义如下:
(9)
其中:i=2,3,…,n;ri和σi为设计的正参数.
控制器的设计过程共分为n步.
第1步 考虑系统(8)中的第一个子系统,选择以下Lyapunov函数:
(10)
由z2=ξ2-α1,推导出V1导数:
(11)


|δ1(Z1)|≤λ1.
(12)
其中δ1(Z1)是逼近误差.

(13)

(14)
(15)
将式(13)和(15)代入式(11)中,得到:
(16)
(17)
第j步j=2,3,…,n-1,考虑下面的Lyapunov函数:
(18)
Vj导数为:
(19)
则有:
(20)
(21)
由于ξj+1=zj+1+αj,式(21)可以得出如下形式:
(22)


(23)
第n步 考虑以下Lyapunov函数:
(24)
Vn导数为:
(25)


(26)
3 稳定性分析

(1) 闭环系统中的所有信号均为半全局一致最终有界.
(2) 输出跟踪误差e(t)=y(t)-yr(t)小于预设的界限,并且满足暂态过程和稳态的预设性能.
证明:(1)由于
(27)
将式(27)带入式(26)中,得到:
(28)
设置控制参数如下:
(29)


(30)
由不等式得到:

(31)

(2) 由V1和式(31)可知:
(32)
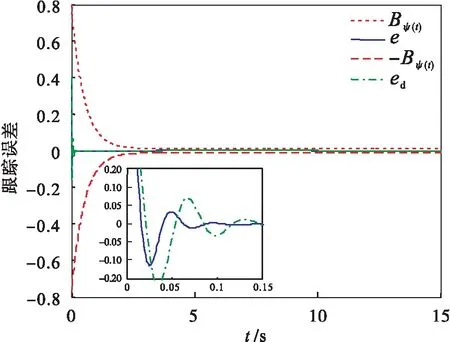
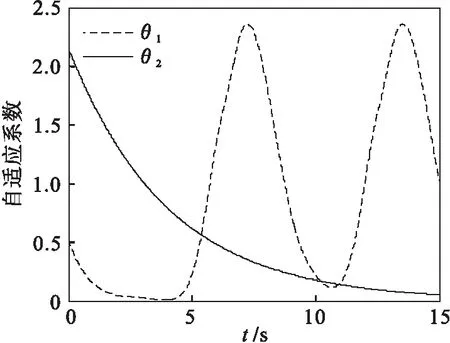
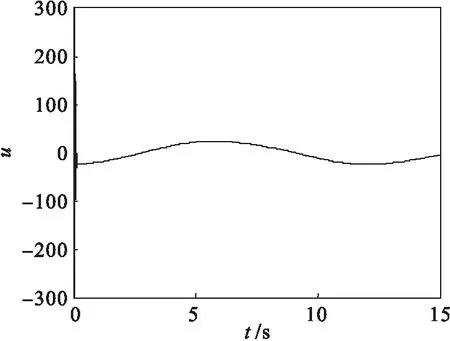
从Π>0,Λ>0,0 V(0)e-Λt≤V(0). (33) 式(33)代入式(32)可得: (34) (35) 即: (36) 因此可得: (37) 即: (38) 因此可以看出,输出跟踪误差小于预设的界限,通过选择合适的设计参数,误差可以任意小. 考虑单连杆机械手臂动力学系统的数学描述如下[14]: (39) 其中:M为负载端惯量;m为负载质量;L为连杆长度;u表示电机的输入电压. 机械手臂的参数设置:m=1 kg,M=0.5 kg·m2,L=1 m,g=9 m/s2.跟踪误差的预设性能参数设置:边界函数的初始值ρ0=0.8,稳态误差ρ∞=0.01,最小收敛速度β=2.选取控制参数值为:k1=150,k2=30,a1=5,a2=2,r1=r2=0.25,σ1=5.25和σ2=0.25.初始条件设为[ξ1(0),ξ2(0)]T=[0.4,2.5]T,[θ1(0),θ2(0)]T=[0,0]T.理想输出轨迹为yr(t)=sin(0.5t).仿真结果如图1~图4所示. 由图1和图2可以看出,与参考文献[2]的一般动态面控制(DSC)方法相比较,采取相同的参数设置,本文所提方法下系统的超调量更小.自适应参数变化曲线和控制量输入u分别如图3和图4所示.仿真结果表明,本文所提出的控制方法具有较好的跟踪性能,且跟踪误差被限定在预设的约束范围之内. 图1 系统的实际输出y,一般动态面方法的yd,理想输出yr 图2 系统的跟踪误差e,一般动态面方法的ed 图3 自适应参数曲线 图4 控制量输入u 建立了一种用于不确定严格反馈非线性系统的轨迹跟踪反演控制方法.通过设计约束函数以实现跟踪误差的预设性能控制.仿真结果的实际输出与一般动态面方法的输出相比较,可以得到机械手臂动力学系统的跟踪性能较好,调节速度较快.仿真结果的跟踪误差与一般动态面方法的跟踪误差相比较,可以得到机械手臂动力学系统的超调量更小,振荡较少,且跟踪误差被限定在约束范围之内.所以仿真结果表明了性能约束的自适应反演控制方法的有效性和可行性.
4 仿真结果与分析

5 结 论
