基于连杆机构综合的水下仿生推进装置设计❋
2018-10-15常宗瑜王吉亮杨晓光方亚明
常宗瑜, 王吉亮, 杨晓光, 方亚明
(1. 中国海洋大学工程学院,山东 青岛 266100; 2. 山东省海洋工程重点实验室,山东 青岛 266100)
海洋动物在长期的进化过程中形成了高超的游泳能力,科学家和工程师希望通过对海洋动物的运动机理分析研发出新型的高性能仿生推进装置。海龟可以利用前肢水翼的运动推进身体前进,相比螺旋桨推进方式,具有灵活性好、噪声低、涡流利用率高等优点[1]。研究海龟的行进机理,对于研究水下航行器新型驱动方式、优化动力能源和降低噪声具有理论研究意义和实用价值[2]。
国内外学者对仿海龟推进技术及机理进行了大量的研究工作,并取得了一些研究成果。文献[3]通过模拟海龟水翼运动,设计出“Flapping Foil”航行器。文献[4]利用伺服电机控制叶片的位置和姿态,模拟了海龟水翼运动并研制出仿海龟运动的水下机器人。文献[5]研制了仿生机器海龟Madeleine,并从能量角度分析水翼运动过程中能量的耗散方式。文献[6]研制了一种基于凸轮和连杆机构的推进装置,以实现仿生推进运动。文献[7]描述了水翼运动典型状态下的翼态特征和运动情况。文献[8]采用有限体积法和非结构动网格技术,完成了对水翼运动的非定常建模研究。文献[9]采用数值计算方法,研究了翼型参数对仿生扑翼的推力和升力特性的影响。文献[10]研究了水翼瞬时攻角和柔度对摆动水翼推进性能的影响。
本文对海龟基于升力模式的扑翼运动机理进行分析,获取了海龟水翼在游动过程中的运动规律,采用机构综合的轨迹创成和刚体导引方法,设计出铰链四杆机构,实现仿海龟运动。该装置设计的目标为利用连杆曲线形状的复杂性,使固连在连杆上的翼片能够近似实现海龟水翼的运动轨迹和姿态。通过对设计的四杆机构进行了运动学仿真,获取了其轨迹、姿态和角速度等运动参数。
1 海龟行进机理
海龟在深水游动时往往采用升力模式的运动方式,该方式具有较高的效率。升力模式推进是水翼在流体中进行挥拍和俯仰运动,通过不断改变前缘的上翘姿态及下沉姿态来调节击水攻角,从而利用水流产生的反作用力实现前进运动。海龟水翼的运动过程主要包括下拍、俯旋、上挥及仰旋等。基于大量的实物观测数据以及充分的分析得出,海龟主要由上挥和下拍两个过程产生推进力。图1为海龟水翼运动过程中水翼末端的运动轨迹和攻角变化。
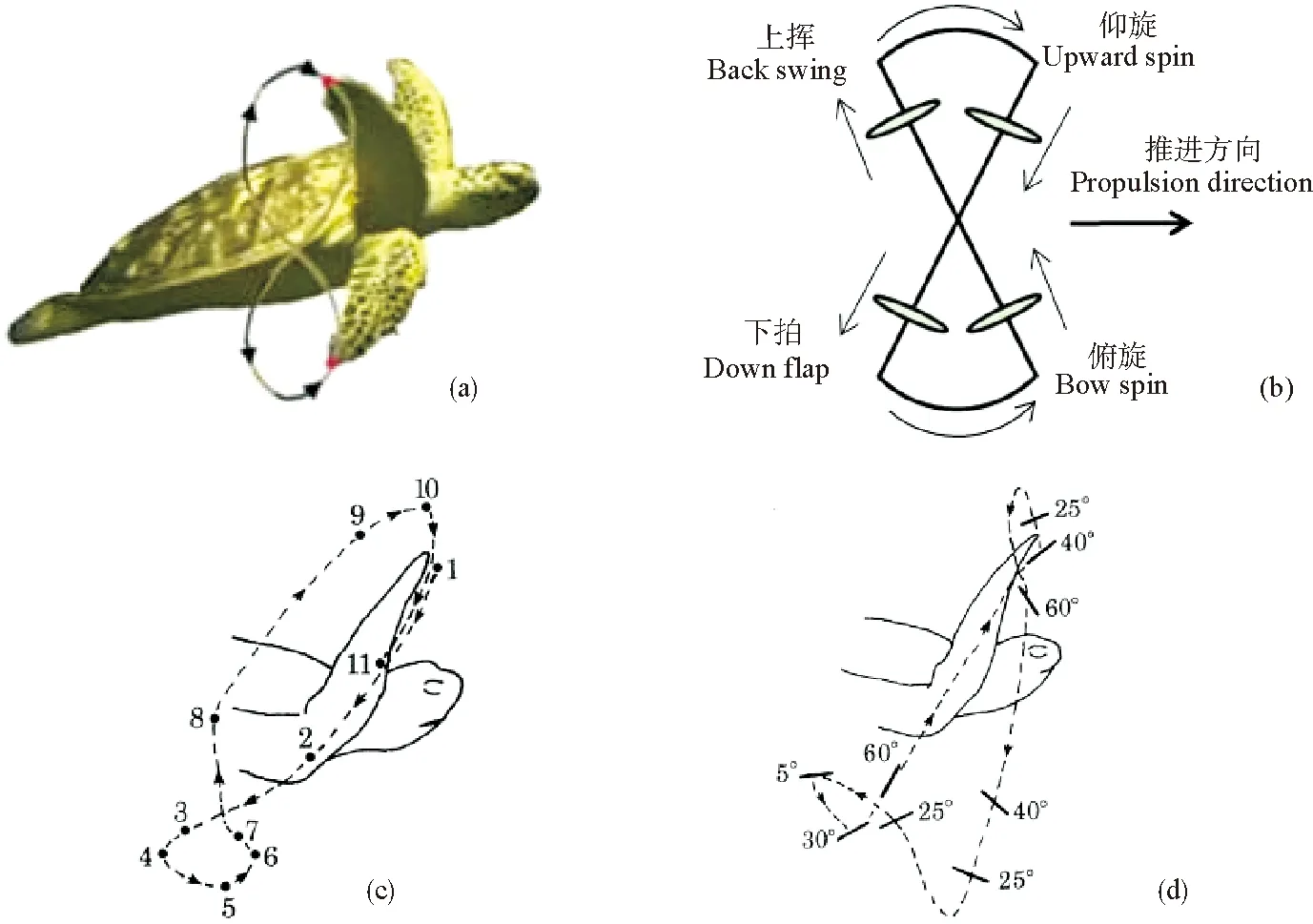
((a) 水翼末端轨迹 Trajectory of hydrofoil tip; (b) 攻角变化Variation of attack angle; (c) 水翼末端路径 Path of hydrofoil tip; (d) 水翼攻角 Attack angle of hydrofoil)
图1 海龟水翼运动
Fig.1 Movement of turtle hydrofoil
图1(a)和(b)为海龟水翼末端运动轨迹和攻角变化简图[4]。由图可知,海龟水翼末端的轨迹在一个运动周期内呈“8”字形,海龟水翼在上挥和下拍过程中,通过不断改变击水攻角,实现运动姿态的调节和前进运动。图1(c)和(d)为获取的海龟水翼末端运动路径和攻角变化[11]。在一个周期内,海龟水翼在9个不同时刻处的攻角如图2所示。
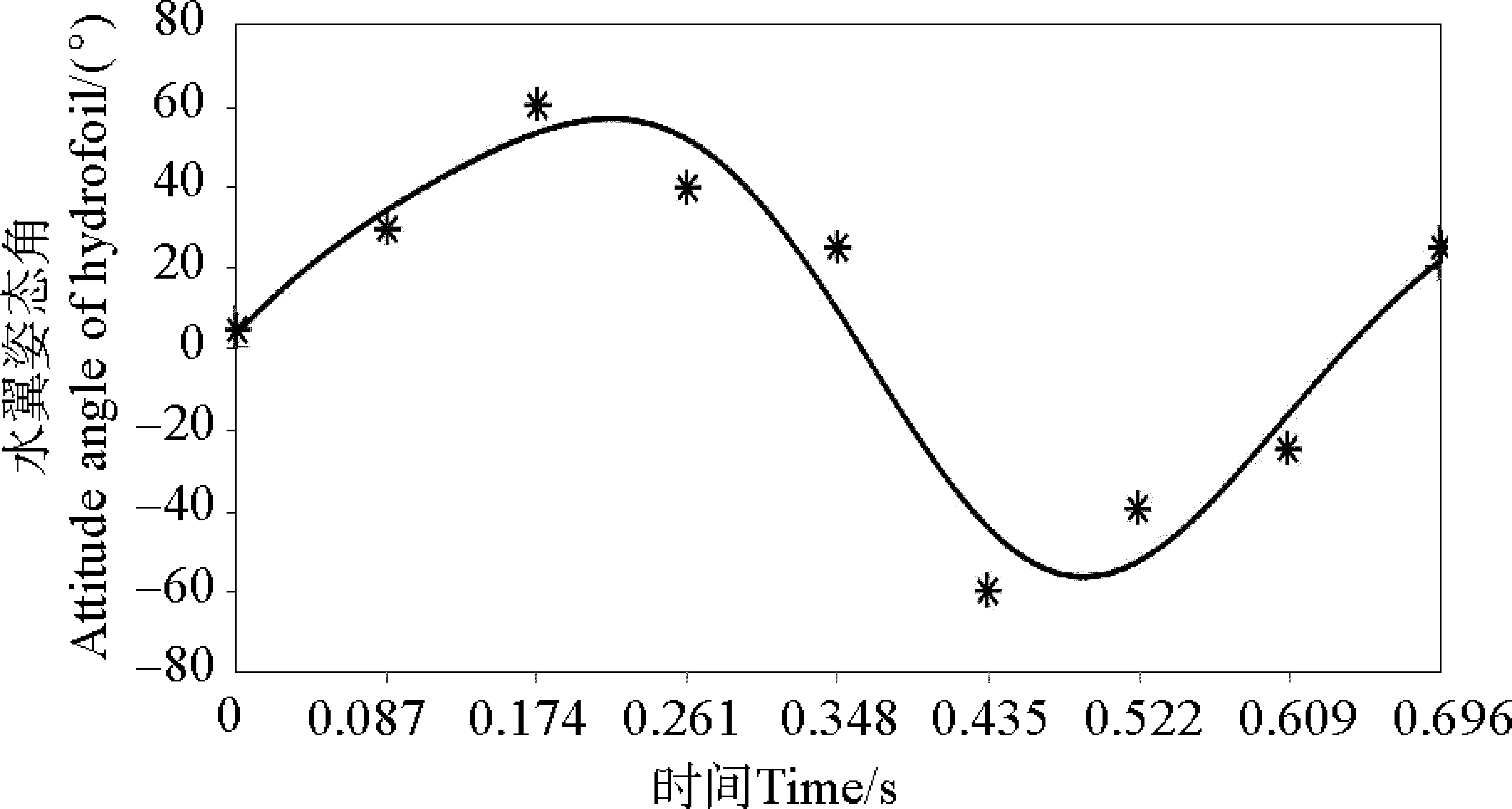
图2 海龟水翼攻角变化Fig.2 Attack angle change of turtle hydrofoil
由图2可知,海龟水翼攻角在一个周期内的变化范围大致为-60°~60°,水翼攻角的变化较为平缓且变化规律近似正弦运动。
2 仿生推进机构的设计方案
现在研制仿海龟的推进装置主要有两种形式,一种是采用多个伺服电机,独立控制翼片的轨迹和攻角[12];另外一种采用复杂的组合机构实现翼片的仿海龟推进运动[6]。这两种方法的结构和控制相对比较复杂。根据连杆机构的特征,铰链四连杆机构可以实现比较复杂的刚体位置和轨迹,利用四杆机构连杆曲线的复杂性可以进行仿海龟推进机构的设计[13]。构思的基于连杆机构的仿生推进模型如图3所示,在连杆固连的物体上安装翼片,通过设计四杆机构,可使翼片实现给定要求的位置和姿态。

(1-本体 Vehicle; 2-四杆机构 Four-bar linkage; 3-翼片 Fin)图3 仿生推进模型Fig.3 Biomimetic propulsion model
2.1 机构运动姿态分析
对于仿生推进机构的设计来说,不需要精确模拟海龟水翼运动的位置和姿态,但需要四连杆机构连杆上固连的翼片形成类似海龟水翼的运动。采用文献[14]提出的利用连杆转角曲线进行平面连杆轨迹综合的设计方法,根据该方法,对于给定的四杆机构,其连杆上不同位置处的连杆转角φ随曲柄转角ω的变化曲线的形状是相同的,如图4所示。
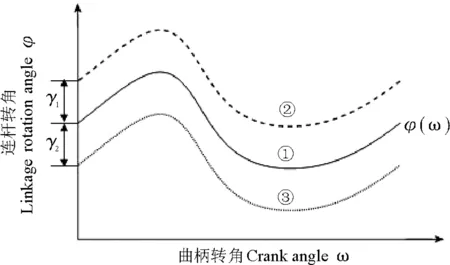
图4 连杆上不同位置倾角变化Fig.4 Angle change of different positions in linkage
图4中,曲线①为连杆上两个铰接点之间标线的转角曲线,曲线②和③为与标线夹角分别为γ1和γ2处的转角曲线。由图4可知,在一个周期内,连杆上不同位置的倾角变化尽管数值不同,但是其变化规律是相同的。将仿海龟水翼运动的翼片固连于连杆上,通过调整翼片在连杆上的姿态,使其倾角与水翼攻角相吻合,即可模拟海龟水翼姿态的变化。
2.2 机构运动轨迹分析
对于理想仿生推进机构设计来说,需要与连杆固连的翼片能够实现给定的位置和姿态,这是机构综合中典型的刚体导引问题。应用连杆机构实现连杆预先指定的若干个位置,关键在于找出连杆上的铰接点[15]。假设连杆通过一系列指定位置P1Q1、P2Q2、…、PnQn(n≥3),在绝对坐标系下,其对应位置的姿态角为θ1、θ2、…、θn,如图5(a)所示。假定第一个位置处的连杆铰接点为B1和C1,当第i(i≤n)个位置PiQi确定时,如图5(b)所示,从第一个位置到第i个位置处的坐标变换可以表示为:
rBi=rP1+rP1Pi+R(θ1i)rP1B1。
(1)

(2)
其中,θ1i=θi-θ1。
因为
rPi=rP1+rP1Pi。
(3)
将式(3)带入式(1)中,可得:
rBi=rPi+R(θ1i)rP1B1。
(4)
连杆铰接点B1、B2、…Bi为同一圆周上的点,其圆心A为连架杆与机架的铰接点,即满足
‖rABi‖2=‖rAB1‖2,
(5)
其中,
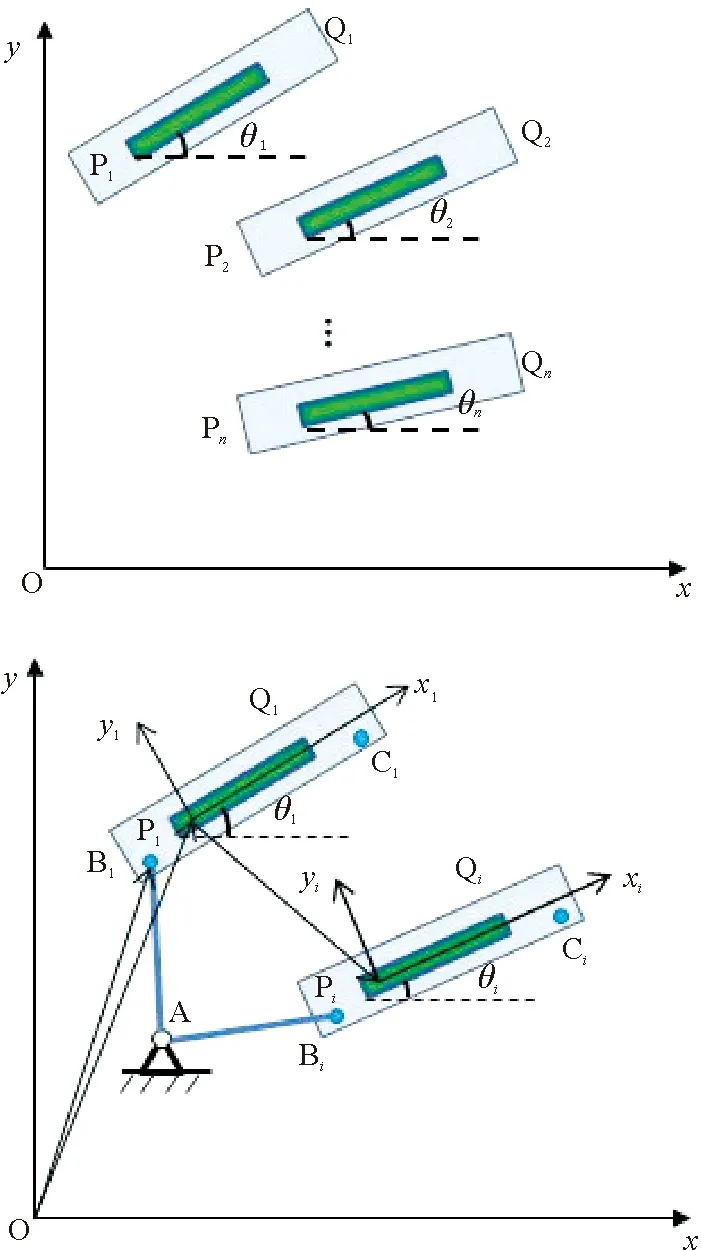
图5 连杆位置Fig.5 Linkage positions
(6)
rAB1=rB1-rA。
(7)

将式(5)展开可得:
di1xA+di2yA+di3=0 。
(8)
其中,i=2,3,…,n,xA和yA为A的绝对坐标。
di1=2[xB1(1-cosθ1i)+yB1sinθ1i+xP1cosθ1i-
yP1sinθ1i-xPi],
di2=2[yB1(1-cosθ1i)-xB1sinθ1i+yP1cosθ1i+
xP1sinθ1i-yPi],
di3=2(-xPiyB1-xP1yPi+xPiyP1+xB1yPi)sinθ1i+
2(xPixB1-xPixP1-yPiyP1+yB1yPi)cosθ1i-2yB1yP1-
(9)
式(8)含有四个未知数xA、yA、xB1和yB1,给定连杆5个特定位置和姿态,带入方程即可求得铰接点A和B1的位置[16]。
2.3 机构参数
给定连杆上固连翼片的5个特定位置和姿态,如表1所示,带入式(8)中,即可求得仿生推进机构的物理参数。仿生推进机构如图6所示,其参数见表2。
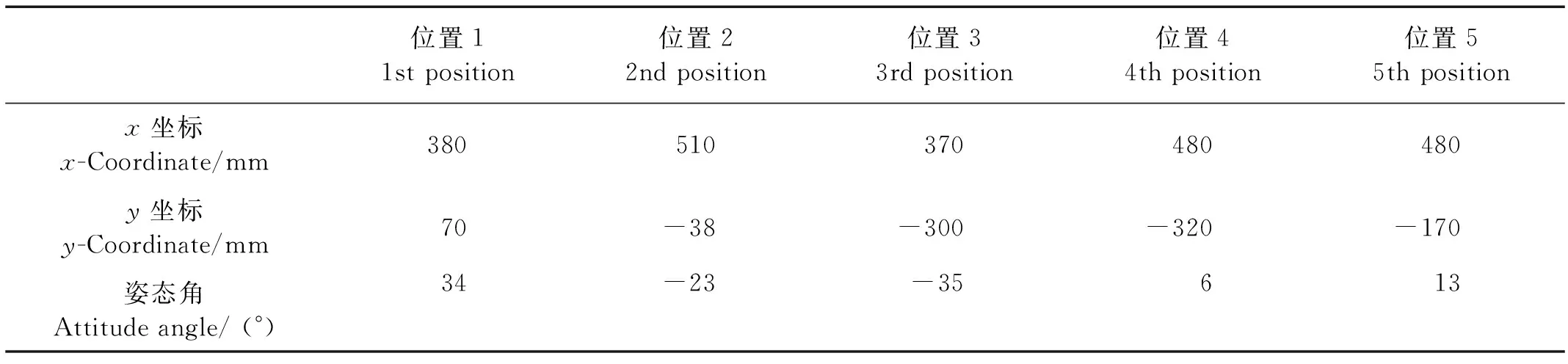
表1 翼片上5个特定位置和姿态Table 1 Five specified positions and attitudes of the fin
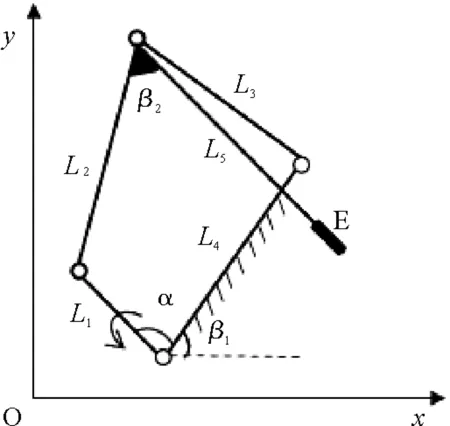
图6 仿生推进机构Fig.6 Biomimetic propulsion mechanism
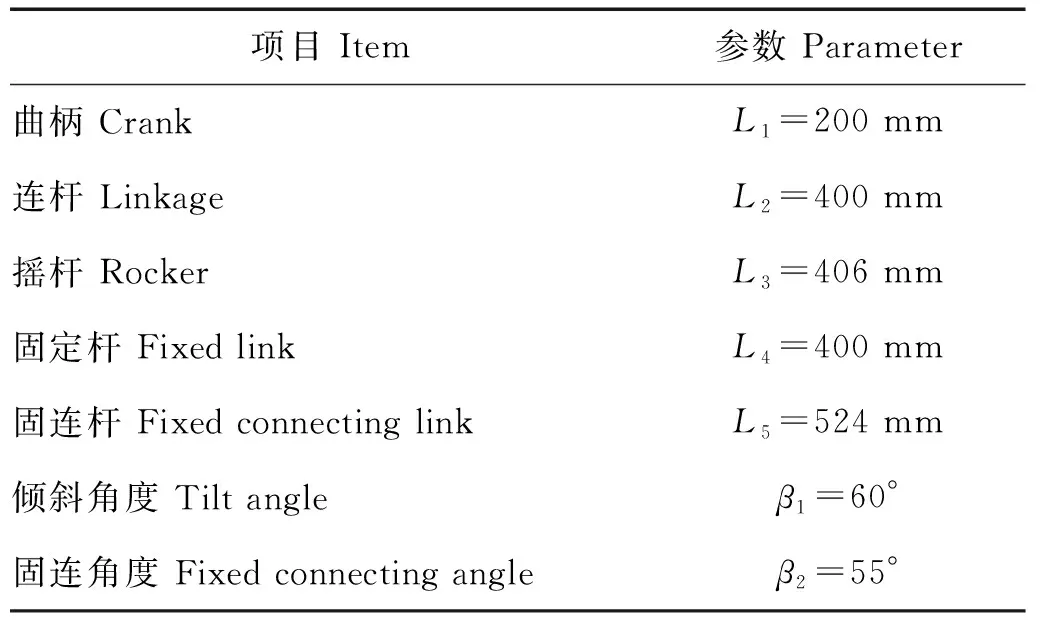
项目 Item参数 Parameter曲柄 CrankL1=200 mm连杆 LinkageL2=400 mm摇杆 RockerL3=406 mm固定杆 Fixed linkL4=400 mm固连杆 Fixed connecting linkL5=524 mm倾斜角度 Tilt angleβ1=60°固连角度 Fixed connecting angleβ2=55°
3 仿生推进机构运动学分析
采用设计的仿生推进机构来模拟海龟水翼的运动,当曲柄初始位置α=30°,角速度为30°/s 时,叶片E所经过的轨迹和姿态变化如图7(a)和7(b)所示,叶片末端在一个周期内的角速度变化如图7(c)所示。
从图7(a)和(b)可以看出,叶片的运动轨迹基本满足设计所需的海龟水翼运动,且叶片姿态角的变化类似于海龟游动过程中水翼攻角的变化。叶片角速度的变化规律与正弦运动相似,如图7(c)所示,进一步表明该机构可较好地实现类似海龟游动过程中水翼姿态角的变化。该仿生推进机构设计的主要目的是产生类似海龟水翼的运动,其运动学分析结果表明该仿生推进机构满足设计要求。
4 结语
本文在分析海龟的鳍肢运动的基础上,提出了一种仿海龟运动的四连杆仿生推进装置,并对其进行了运动分析。文中基于分析得到海龟的鳍肢运动的位置和姿态运动,采用了连杆轨迹创成和刚体导引的机构设计方法,运用连杆机构综合的方法设计了一种四杆机构形式的仿生推进装置,模拟海龟水翼基于升力模式的挥拍运动。文中对机构的轨迹、姿态和角速度等参数进行了分析,其运动规律与海龟的运动形式相吻合,可以满足仿生推进运动的要求。该研究对于设计开发水下机器人的推进方式的研究方面具有借鉴价值和指导意义。

图7 叶片运动状态Fig.7 Movement state of blade
