水翼对高速双体船纵向减摇性能影响研究
2019-05-16李燎原
王 允,余 骁,李燎原,雷 慧
(1. 武汉第二船舶设计研究所,湖北 武汉 430064;2. 中国舰船研究设计中心,湖北 武汉 430064)
0 引 言
高速双体船[1]因其航速高、甲板面积大、安全性高等优点,在船舶与海洋工程中得到广泛应用。但高速双体船在波浪中航行时会产生横摇与纵摇相耦合的摇荡运动现象,而且会因为其高航速或者遭遇频率的提高导致船体在迎浪航行时产生更为剧烈的升沉和纵摇运动[2],因此有必要考虑在船体上加装合适的减缓船体纵摇与升沉的控制装置,称之为减摇附体,并通过对减摇附体的选择与优化,使得双体船具有更高的使用价值,其中水翼为减摇附体中比较有实用价值的一种。本文对高速双体船上水翼的攻角、尺寸、安装方式等方面进行布局与设计,并且基于静特征数[3]的附体减摇能力分析方法,来分析静水中水翼对高速双体船的纵向减摇能力,为高速双体船在实际风浪中航行时水翼对高速双体船的纵向运动控制研究和减摇能力分析提供基础和依据。
1 某高速双体船水动力数值计算
本文以Fluent软件[4]为数值求解工具,所计算的某高速双体船的主要尺度参数见表1。
本节中对某高速双体船的水动力进行数值计算时不考虑吃水以上部分的影响。对高速双体船进行缩尺后计算,缩尺比为1:30。缩尺后双体船模型几何参数为:船长17.87 m,船体水线宽5.84 m,片体水线宽1.48 m,设计吃水 0.99 m,船体湿表面积 381.24 m2。高速双体船的计算航速为30 kn,因此模型的航速为2.817 5 m/s。图1为高速双体船的三维几何计算模型。

表 1 某高速双体船主要尺度参数Tab. 1 Main dimensions of the certain high-speed catamaran

图 1 某高速双体船的三维几何计算模型Fig. 1 Three-dimensional geometric model of the certain high-speed catamaran
1.1 计算流体域与边界条件设置
对高速双体船计算域的范围和边界条件设定为:船长方向由船首向前取为2倍船长处,边界条件设置为速度入口,由船尾向后取为4倍船长处,边界条件设置为自由出口;船宽方向由2个片体的最外侧向外延伸取为15个片体半宽处;吃水方向由船体基线向下取为15倍吃水处。侧面边界条件均设置为壁面边界。模型的计算域示意图如图2和图3所示。

图 2 计算域侧视图Fig. 2 Side view of the calculation domain

图 3 计算域俯视图Fig. 3 Vertical view of the calculation domain
1.2 网格划分
此高速双体船的网格划分采用混合网格的方式,应用ICEM软件[5]来划分,即内部流场采用非结构网格,而外部流场采用六面体结构化网格,网格的划分如图4和图5所示。为了保证混合网格处理湍流边界层的精度,有必要在片体表面生成边界层。

图 4 流场域网格划分(局部)示意图Fig. 4 Schematic diagram of mesh division in flow field(part)

图 5 内部流场非结构网格示意图Fig. 5 Schematic diagram of unstructured meshes of internal flow field
对于船体表面边界层网格的生成,需要确定出第1层网格的分布,尤其是第1层网格节点高度y,它以Y+值来衡量,满足公式[6]:

式中:L为船模长度;Re为船模长度下的雷诺数。当30≤Y+≤200时,可以比较好地模拟出片体表面边界层的流动情况。
1.3 计算结果
应用上述模型和设置、采用SST k–ω湍流模型、离散格式选取为1阶迎风格式,对某高速双体船船模的水动力性能进行数值预报。计算时实船的航速选取为 30 kn,即模型的计算航速为 2.817 5 m/s。建模时,x轴从船尾向船首看去指向左舷为正,y轴沿吃水方向向上为正,z轴指向船首为正。计算得出的船体水动力性能计算结果如表2所示。

表 2 某高速双体船水动力性能计算结果Tab. 2 Hydrodynamic capacity calculation results of the certain high-speed catamaran
高速双体船片体表面的压力分布云图如图6所示。
2 水翼选型方案设计
本章以Fluent软件为数值求解工具,主要根据某高速双体船的水动力性能,来确定船上安装水翼的尺寸以及安装方式。其中,对于水翼的安装方式,选取2种常见的安装方式进行水动力性能[7 – 8]的比较,选择出其中性能较优的一种。以此为基础,对高速双体船加装水翼前后的水动力数值进行计算、加以比较,意在分析出水翼对高速双体船纵向运动方面的影响。

图 6 船体表面的压力分布云图Fig. 6 Diagram of pressure distribution of the catamaran surface
2.1 水翼尺寸确定
对于安装在某高速双体船上的水翼,本文选择标准NACA0021翼型。需要对水翼的尺寸进行确定,即需要确定水翼的面积和展弦比。
对于平面形状为矩形的翼型,其展弦比λ表示为

式中:l为水翼的展长;b为水翼的弦长。
水翼的展弦比是影响水翼水动力性能的重要参数之一,特别是对水翼升力性能的影响。选择NACA0021翼型展弦比分别为1.5、2.0和2.5三种情况下的水翼进行阻力系数和升力系数的计算,计算结果如图7和图8所示。
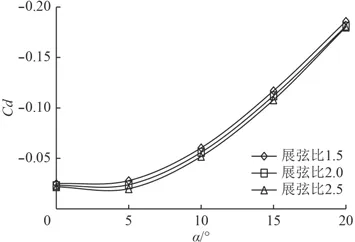
图 7 不同展弦比下水翼的阻力系数Fig. 7 Drag coefficient of hydrofoil in different aspect ratio

图 8 不同展弦比下水翼的升力系数Fig. 8 Lift coefficient of hydrofoil in different aspect ratio
可以看出,在同一水翼攻角下,水翼的阻力系数随着展弦比的增大而减小,升力系数随着展弦比的增大而增加。可见,在其他参数相同时,相同的水翼面积下,若要提高水翼的升力,可以增大水翼的展弦比。展弦比增大意味着水翼的展长增大弦长减小,但水翼的展长不能过大,它受双体船的片体间距和水翼自身的结构强度要求所限。在实际应用时,在条件允许的范围内,可以通过增加展弦比来提高水翼的升力性能。
根据以上分析,本文选定所研究NACA0021型水翼的展弦比λ=2.0。
在确定了水翼的展弦比后,需要再确定水翼的面积。所选择的确定方法为:使船体纵倾一定的角度,采用Fluent软件计算出船体的纵倾力矩,从而估算出船体回复到正浮状态所需要的回复力矩。而船体加装水翼后,水翼可以提供一定的纵向力矩,用来充当双体船的回复力矩。通过此回复力矩值可以估算出水翼的面积,所根据的公式为:

式中:L为所安装水翼的位置到船体建模原点的纵向距离,本文取为35 m;v为实船的航速,为30 kn;M′为船体恢复到正浮状态所需要的回复力矩。
由上式估算得出水翼的面积S为2.92 m2,综合多种因素,选取计算水翼的面积为4.0 m2。
以上确定了水翼的展弦比λ=2.0,水翼的面积S为4.0 m2,由此确定所计算高速双体船上安装NACA0021型水翼的展长为2.828 m,弦长为1.414 m。
2.2 水翼安装方式
水翼在高速双体船上的安装位置直接影响到水翼对高速双体船水动力性能的影响。本节对水翼采用2种安装方式,并对加装水翼的高速双体船进行水动力性能计算分析,选出性能较优的那种安装方式。
1)水翼安装于片体首部舷侧
将水翼安装于双体船的片体首部舷侧,即在高速双体船的2个片体的内侧安装水翼,图9给出了左侧片体安装水翼后的示意图,右侧片体与之相对应。
2)水翼安装于片体首底
将水翼以T型水翼的方式安装于双体船的片体首底,即在高速双体船2个片体的底部安装T型水翼,水翼通过支架与船体相连接。图10给出了左侧片体安装水翼后的示意图,右侧片体与之相对应。
下面分别计算2种水翼安装方式下高速双体船的船体水动力数值。选取水翼攻角为–20°,–15°,–10°,–5°,0°,5°,10°,15°,20°共 9 个不同的摆角,将2种情况下的水动力计算结果进行比较,如图11~图13所示。

图 9 片体舷侧安装水翼示意图Fig. 9 Demihull side mounted hydrofoil schematic

图 10 片体首底安装水翼示意图Fig. 10 Demihull bow bottom mounted hydrofoil schematic

图 11 不同攻角下水翼相对于船体产生的阻力Fig. 11 Drag of hydrofoil to catamaran in different attack angle

图 12 不同攻角下水翼相对于船体产生的垂向力Fig. 12 Lift of hydrofoil to catamaran in different attack angle
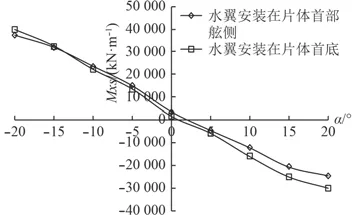
图 13 不同攻角水翼相对于船体产生的纵向力矩Fig. 13 Moment of trim of hydrofoil to catamaran in different attack angle
图11~图13分别表示2种水翼安装方式下不同攻角下水翼相对于船体产生的纵向阻力、垂向力和纵向力矩,将水翼安装在双体船片体首部舷侧时的计算结果和水翼安装在双体船片体首底部的计算结果比较发现,总体来讲,后者计算得出的垂向力和纵倾力矩变化范围较大,即可以对高速双体船的纵向运动产生更大范围的影响。产生这种结果的原因可以分析为:水翼安装在双体船片体首部舷侧时,是直接与片体相接触,水翼的性能会受到船体的影响;而水翼以T型水翼的方式安装在片体首底,是通过一定连接机构与片体间接连接,船体对其水动力影响相对较小。
因此在本文的某高速双体船上,所安装的水翼方式为将水翼安装以T型水翼的方式安装在片体首底。
2.3 船体对舷侧水翼水动力数值影响
上一节通过计算对比,得出水翼安装在双体船片体首底部比安装在片体首部舷侧能够对高速双体船的纵向运动产生更大范围的影响,原因分析为:水翼安装在片体首部舷侧时,是直接与片体相接触,水翼的性能会受到船体的影响。本节对水翼安装在首部舷侧时船体对水翼的水动力影响进行数值分析。
选择以下3种情况下,计算得到水翼产生的阻力值和升力值,并进行比较分析:
1)水翼加装在高速双体船上;
2)将高速双体船去掉,只保留水翼,其他条件如计算流体域的划分、网格的划分、边界条件的设置等与水翼加装在高速双体船上时相同;
3)将高速双体船去掉,以与船长相当尺度的壁面代替,保留水翼,其他条件如计算流体域的划分、网格的划分、边界条件的设置等与水翼加装在高速双体船上时相同。
以上3种情况下计算得出的水翼阻力和升力曲线如图14~图15所示。
比较有船体时水翼的水动力数值和将船体拿掉时水翼的水动力数值,可以看出船体对水翼的水动力会产生一定的影响,会使得水翼产生的阻力和垂向力减小,产生的误差最大值为4.7%;若用与船长同尺度的壁面代替船体,计算出的水翼的水动力数值则与无高速双体船时水翼的数值相差较小,产生误差的最大值为2.8%。因此,在分析船体对安装水翼的水动力性能影响时,若用与船长相同尺度的壁面来代替船体,求得的水翼水动力数值与实际值更为接近。

图 14 水翼产生的阻力Fig. 14 Drag of hydrofoil

图 15 水翼产生的垂向力Fig. 15 Lift of hydrofoil
2.4 水翼对双体船水动力性能影响
在前面选出了某高速双体船上安装水翼的尺寸、位置及安装方式后,本节对所选水翼对高速双体船的水动力性能影响进行分析。上节中已经计算出了水翼在攻角为–20°,–15°,–10°,–5°,0°,5°,10°,15°,20°下船体及水翼的阻力、垂向力和纵倾力矩,并通过绘制曲线的形式表示了出来。从图11~图13可以看出,随着水翼攻角的增加,船体受到的阻力、船体的垂向力和纵倾力矩都有所增加。
3 水翼静特征数计算分析
3.1 减摇附体静特征数定义
减摇附体静特征数[3]指的是船舶在静水中航行时,安装在船体上的运动控制装置(如首部水翼)作用在船体上时产生最大的垂向力和纵倾力矩,会使船体产生一个最大的升沉位移和最大纵倾角。静特征数表征了减摇附体对船体纵向运动的最大控制能力。分别记φ3为升沉静特征数,表示附体作用于船体产生垂向力而引起的升沉位移;记φ5为纵摇静特征数,表示附体作用于船体产生纵倾力矩而引起的纵倾角度。φ3和φ5的表达式分别为:

式中:F和M为表示运动控制装置(水翼)作用于船体而产生的垂向力和纵倾力矩;qcm为船体的每厘米吃水吨数;Δ为船舶的设计排水量;H为船舶的纵稳性高。
静特征数越大,表明纵向运动减摇附体对船体的纵摇和升沉的控制能力就越强。因此,静特征数是表征纵向运动减摇附体对船体纵向运动控制能力的重要指标,其控制能力主要取决于减摇附体的尺寸、安装位置和水动力性能等。
规定升沉静特征数φ3的方向上升为正,下沉为负;规定纵摇静特征数φ5首倾为正值,尾倾为负值。计算过程中所用到的数学符号及其表示的含义如下:φ3s为水翼相对于船体产生的升沉静特征数,m;φ5s为水翼相对于船体产生的纵摇静特征数,(°)。
3.2 水翼静特征数计算分析
前面已经计算出了高速双体船首底部加装水翼后不同攻角水翼相对于船体产生的垂向力和纵倾力矩,根据式(3)和式(4)计算出水翼的升沉静特征数和纵摇静特征数,可以得出其随水翼攻角改变的变化曲线,如图16和图17所示。从图中可以看出,水翼的升沉静特征数(绝对值)随着水翼攻角(绝对值)的增加而增大,水翼攻角从0°逐渐变为–20°时,可使高速双体船船体下沉且最大下沉1.11 m,水翼攻角从0°逐渐变为20°时,可使高速双体船船体抬升且最大抬升0.97 m;水翼的纵摇静特征数(绝对值)随着水翼攻角(绝对值)的增加而增大,水翼攻角从0°逐渐变为–20°时,高速双体船船体逐渐埋首且埋首最大角度为4.94°,水翼攻角从0°逐渐变为20°时,高速双体船船体逐渐抬首且抬首最大角度为3.73°。可以表明水翼对高速双体船升沉与纵摇的控制能力随着水翼攻角(绝对值)的增大而增大。

图 16 水翼的升沉静特征数Fig. 16 Heave static characteristic number of hydrofoil
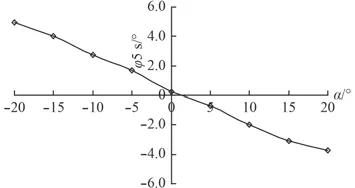
图 17 水翼的纵摇静特征数Fig. 17 Pitching static characteristic number of hydrofoil
4 结 语
本文目的为开展静水状态下水翼和高速双体船纵向水动力的Fluent数值模拟研究,基于水翼对高速双体船的纵向减摇能力,在水翼的攻角、尺寸、安装方式方面进行设计选择,并且基于静特征数的附体减摇能力分析方法,来分析静水中水翼对高速双体船的纵向减摇能力,为高速双体船在实际风浪中航行时水翼对高速双体船的纵向运动控制研究和减摇能力分析提供基础和依据。研究出的结论主要有:
1)对某高速双体船上安装的水翼进行选型确定,主要包括水翼展弦比、水翼面积和水翼安装方式的确定。水翼确定后,分析了水翼和高速双体船对彼此水动力性能的相互影响,计算结果表明,船体对水翼的水动力会产生一定的影响,会使得水翼产生的阻力和垂向力减小;水翼的存在会对高速双体船的水动力性能产生一定的影响,随着水翼攻角的增加,船体所受到的阻力、垂向力和纵倾力矩都会有所增加。
2)运用静特征数这一参数对水翼的升沉静特征数和纵摇静特征数进行了计算与分析,得出水翼对高速双体船纵向运动的控制范围和能力。结果表明,水翼会对高速双体船升沉与纵摇产生一定的控制作用,船体升沉范围可从下沉1.11 m到抬升0.97 m,船体纵倾角范围可从首倾4.94°到尾倾3.73°。但是,实际应用中需要权衡水翼对高速双体船产生的阻力。