GPS辅助无人机航空摄影在大比例尺测图中的应用
2018-10-13杨智博
杨智博
GPS辅助无人机航空摄影在大比例尺测图中的应用
杨智博
(新疆兵团勘测设计院(集团)有限责任公司,新疆 乌鲁木齐 830002)
结合实际介绍了无人机航摄系统的发展的相关理论、技术方法等,论证了利用无人机航测技术能够满足1∶1 000地形图的精度要求,阐述了其生产流程,探讨了像片控制点密度和GPS辅助数据对成图精度的影响。
GPS辅助;无人机;航空摄影;大比例尺地形图
1 无人机大比例尺测图关键技术
GPS辅助空中三角测量是利用装在飞机上的GPS信号接收机连续的观测GPS卫星信号,通过GPS载波相位测量差分定位技术的离线数据后处理获取航摄仪曝光时刻设站的三维坐标,然后将其视为附加观测值引入摄影测量区域网平差中,经采用统一的数学模型和算法以整体确定点位并对其质量进行评定的理论、技术和方法。
2 GPS无人机系统
本次试验所用的SKY-27型无人机系统的整体组成:无人机航摄平台、航摄仪、飞控系统、差分GPS、地面站系统。全系统需操作人员4名:机长、驾驶员、任务设备操作员(导航员)、飞行助手,也可视情况适量增减人员。
3 GPS辅助的无人机航摄数据获取
3.1 测区概况
处于北纬43°59′25″~44°39′00″,东经87°17′42″~87°43′15″。城区南距乌鲁木齐市33 km,西距昌吉23 km,东距阜康55 km。地貌形态南高北低,由南向北倾斜坡降0.5‰~2.5‰,海拔420~530 m。
3.2 航线设计
根据作业任务和低空数字航空摄影规范要求,利用地面监控站软件对待航摄测区进行航摄技术参数设计。其中测图比例尺为1∶1 000,摄区设计GSD为0.09 m,相对航高为337 m,航向重叠度为80%,旁向重叠度为60%.
3.3 飞行作业
3.3.1 任务准备阶段
选择起降场地,确定特情处理方案,做好无人机系统的检测和调试工作,事先制订航摄方案设计航线。
3.3.2 执行任务阶段
完成无人机的组装和检查工作,系统检测调试,任务航线发送至飞控,检测完全正常后,发动起飞。地面站实时显示无人机的飞行航迹、飞行参数。数码相机根据航线的设置自动拍照。
3.3.3 返航回收阶段
任务完成后,无人机自动返航到降落场地上空盘旋下降,到达一定高度后在合适位置遥控无人机伞降着陆。着陆后,导航员转存照片和下载POS数据。地勤人员立即进行航后检查、检测、擦拭,并拆卸后装入专用包装箱内。
3.4 数据检查
3.4.1 飞行质量检查
本次成果质量检查,检查结果如下:旁向重叠度61%;航向重叠度80%;倾角(占测区像片数的百分比)优于5°的占90%;旋偏角(占测区像片数的百分比)优于15°的占99.7%.
3.4.2 影像质量检查
先检查POS数与照片数是否一致,抽查转弯处POS是否和照片匹配,再对单片原始影像进行检查。检查要求如下:①影像应清晰,层次丰富,反差适中,色调柔和;②影像上不应有云、云影、烟、大面积反光、污点等缺陷;③确保因飞机地速的影响,在曝光瞬间造成的像点位移动一般不应大于1个像素,最大不应大于1.5个像素;④成果影像不能曝光过度,不能过黑,不能发虚。经检查此次航飞原始影像满足上述要求,可转入下一环节。
3.5 像片控制点布设与测量
3.5.1 像控点的布设
本次试验像片控制点布设方案是按1 km等间距布设,由于测区边界不规则,在凹凸处也加设像控点。
3.5.2 像控点的判刺和整饰及测量
野外控制点应该以判点为主,刺点为辅。平高控制点的实地判点精度为图上0.1 mm。点位应选在高程变化较小,且清晰易判的地物目标。电子版整饰时,点位指示要明确,点位描述要准确,尤其是高程描述,备注好刺点者、检查者姓名。
4 数据处理及精度分析
4.1 差分GPS数据的解算
具体算法为:①提取移动站数据;②GPS基准站文件转换;③GPS移动站站文件转换;④基准站位置计算;⑤载波相位差分处理;⑥输入相机与GPS相对位置参数;⑦提取GPS数据。
4.2 空三加密数据解算
空三解算流程:GPS数据解算→内定向→相对定向→绝对定向→区域网平差→结果输出。
4.3 地形图制作
制作步骤:①以空三加密的成果为基础,生成密集点云数据和DOM数据;②点云数据处理,过滤掉非地面点,生成DEM和等高线;③DOM数据的矢量化;④将矢量化的数据与等高线数据进行套合,进行最后的编辑与整饰,最终成产出满足1∶1 000地形图精度要求的产品。
5 精度分析
本次试验总共抽取了54个检测点,平面坐标和高程检测位置相同,这些点分布在容易检测的关键点上,主要分布在路边线、房角、井盖中心、围墙等上面。以外业实测数据作为真实坐标,作为检测的真实精度,航测内业测量的坐标与实测坐标进行对比。
5.1 平面精度分析
平面中误差分布情况如图1所示。《CHT9008.1—2010基础地理信息数字成果1∶500 1∶1 000 1∶2 000数字线
划图》要求平面中误差要小于0.3 m。由图1可看出,最大误差为0.19 m,最小为0.04 m,平面中误差为0.11 m,因此测图成果精度符合规范要求。
5.2 高程精度分析
高程中误差分布情况如图2所示。《CHT9008.1—2010基础地理信息数字成果1∶500 1∶1 000 1∶2 000数字线
划图》要求高程中误差要小于0.2 m。由图1可看出,最小误差为0.1 m,最大误差为0.3 m,其中误差为0.18 m,因此测图成果精度符合规范要求。
6 结论
本文通过介绍GPS辅助无人机航空摄影的工艺流程,结合实例得出结论:①GPS辅助无人机航空摄影生产1∶1 000比例尺地形图具有可行性;②在GPS辅助无人机航空摄影中1 km均匀布设一个像控点能满足1∶1 000地形图成图规范要求;③GPS辅助无人机航空摄影在大比例尺测图中能极大地提高生产效率,减少外业劳动强度,节约生产成本。

图1 平面中误差分布图
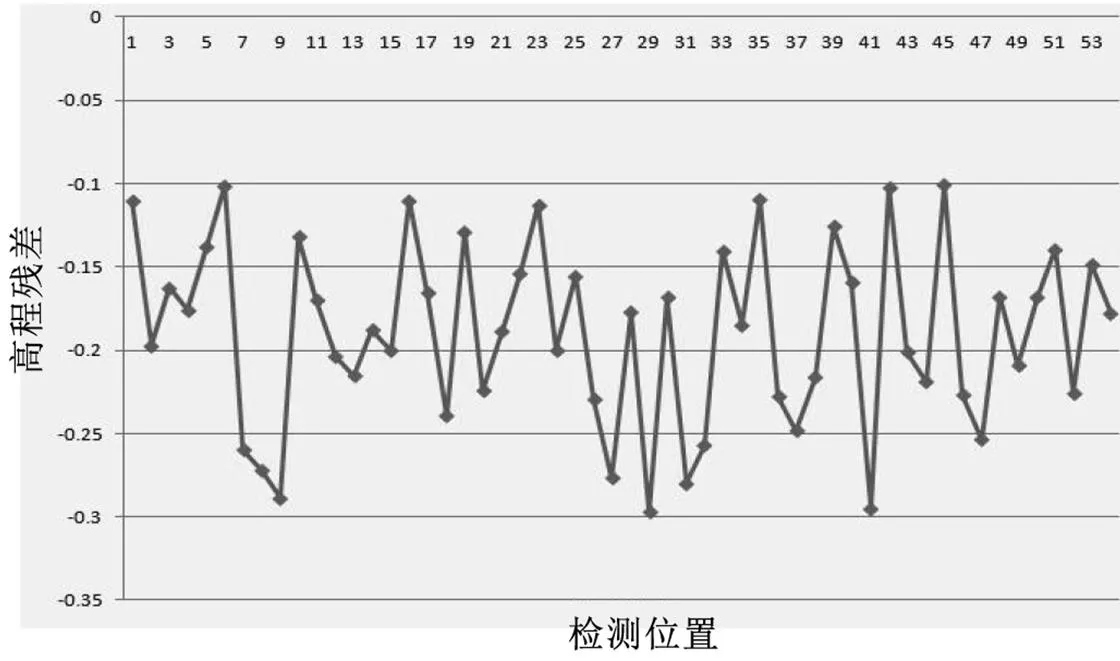
图2 高程中误差分布图
[1]张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2003.
[2]袁修孝,高宇,邹小容.GPS辅助空中三角测量在低空航测大比例尺地形测图中的应用[J].武汉大学学报,37(11):1291-1293.
[3]张继红.无人机摄影测量技术的应用分析[J].城市建设理论研究(电子版),2013,36(26):45-47.
[4]孙晓华,朱长春.GPS辅助空中三角测量原理及应用[J].太江西测绘,2010,22(1):30-31.
〔编辑:严丽琴〕
2095-6835(2018)19-0154-02
P231.2
A
10.15913/j.cnki.kjycx.2018.19.154
