基于PLC与USS通信协议的称重与分拣系统设计
2018-10-11何守磊顾鸣伟
何守磊,殷 振,刘 意,仝 旭,顾鸣伟
(苏州科技大学 机械工程学院,苏州 215009)
0 引言
随着淘宝、京东和苏宁等电商的兴起,消费者逐渐从传统线下门店购买模式转变到线上下单购买模式。尤其是电商每年一度的双十一购物狂欢节,对快递行业分拣的准确性、高效性和安全性要求越来越高。一般物流公司是小公司收件,然后卖给大公司(顺丰等直营企业除外)。收件过程中要根据寄件的大小进行计费,计费的标准是重量、体积等因素共同决定的。对于国际件和小件(袋装件),则是条码和重量相结合的方式计费。人工测算包裹体积与重量过程中,需要多次转放货物,甚至有些员工直接一扔,对货物损伤极大[1],但传统的模式又无法避免这种现象的发生。可编程逻辑控制器(PLC)具有高可靠性和强抗干扰能力[2],被广泛应用于现代自动化控制的加工生产中。为了解决上述人工收件称重慢、效率低、工作不连续等问题,设计了基于西门子1200系列PLC[3,4]和MM440变频器[5],使用称重传感器检测元件,完成对包裹的称重、筛选、分类输送的快速分拣功能。同时,基于USS通信协议的变频器无级调速功能及旋转编码器精确定位与高速脉冲计数功能,可实现对称重分拣过程的半闭环控制,极大降低了包裹在称重和分拣过程中受到的冲击载荷,有效保护包裹内物品的完好性,从软件控制方面实现柔性称重与分拣的目的。
1 分拣系统总体结构
1.1 分拣系统整体结构
分拣系统整体结构如图1所示,主要组成包括:检测单元、输送单元、执行单元、物理装置。检测单元主要由称重传感器、光线传感器、磁性限位检测开关和光电编码器等部分组成,完成对包裹称重,计算输送脉冲数及是否推送到位的功能。输送单元主要由步进电机和输送带组成,完成输送包裹的目的。执行单元的气动推杆,实现将包裹推入传送带的功能。物理装置完成支撑,固定与定位功能。
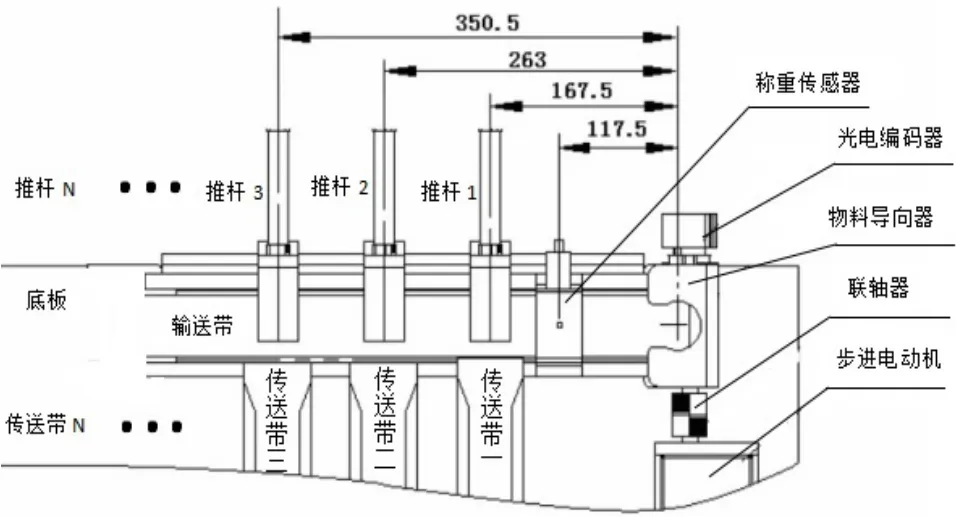
图1 分拣系统结构图
其中,推杆采用清洁环保的气动控制,动力源由空气压缩机提供。PLC通过置位复位电磁阀,控制推杆的伸出与缩回。推杆与传送带过度部分有一定的斜度,便于包裹进入传送带,同时降低推力对包裹的冲击,达到保护包裹完好的目的。

图2 分拣系统实物图
1.2 工作流程
物料被机械手放入物料导向器后,在输送带的运送下,到达称重传感器。延时称重后,输送带继续输送物料至指定推杆位置停止并延时。延时到,推杆动作,物料进入传送带,并被传送到指定区域。

图3 分拣系统流程图
分拣系统控制流程如图3所示,输送带检测到包裹后,启动输送带进行输送任务。包裹进入称重单元后,输送带停止并进行称重,不同重量范围的上下限信号转换成UNI800C的开关量信号,转换得到的结果依次为I1.2(首重1kg以内)、I1.3(续重2kg以内)、I1.5(续重3kg~5kg)。S7-1214C型号PLC通过内部的选择判断指令,确定各类型包裹重量的流向控制,借助推杆将各种重量的包裹推送至指定料槽传送带中。传送完成后,该周期分拣输送任务完成并继续下一周期分拣任务。
2 系统硬件设计
2.1 MM440变频器
分拣系统采用三相减速电机,实现驱动输送带,输送包裹的作用。为了使输送电机运转更加平稳,减少包裹在输送中损坏,尤其是一些对冲击振动敏感的商品。选用MM440变频器[6]和基于RS485的USS通信协议,实现无级调速的目的。

表1 变频器主要参数设置
2.2 称重传感器信号转换
称重传感器受到包裹的压力时,会产生变动的微电压信号,通过将微电压信号送给UNI800C物料分选控制器处理,不同重量范围的上下限信号转换成UNI800C的开关量信号。称重传感器与UNI800C接线图如图4所示。
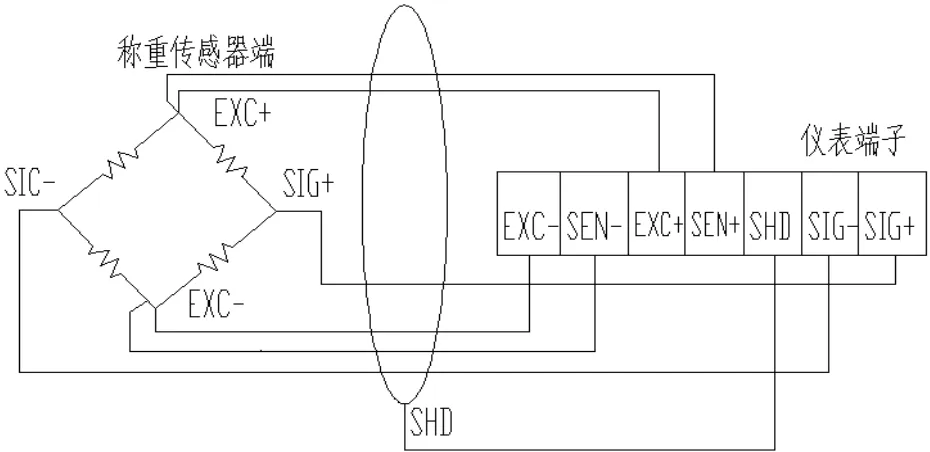
图4 称重传感器与UNI800C接线图
设置对应的参数后,既可以得到不同压力范围转换的开关量,UNI800C中的M1~M3分别对应西门子PLC中的输入量I1.2、I1.3、I1.5。图2中,EXC+/EXC-为正/负激励、SEN+/SEN-为正/负反馈、SIG+/SIG-为正/负信号、SHD为屏蔽地。UNI800C与西门子PLC通过RS232接口连接,接线图如图5所示。

图5 西门子PLC与UNI800C接线图
2.3 旋转编码器
本文选用的增量式编码器在自动生产线上应用十分广泛,结构组成包括光栅盘和光电检测装置。可通过计算旋转编码器每秒输出的脉冲数计算电机的转速。旋转编码器的原理示意图如图6所示。

图6 旋转编码器示意图
光码盘是在具有一定直径的圆板上等距地开通若干个类矩形的狭缝。光电码盘与电动机同轴且同速转动时,经过发光二极管等电子元件构成的检测装置将输出若干脉冲信号,用以检测电机转速。为了实现判断电机正反转信息,增量式编码器利用光电转换原理输出A、B和Z相三组脉冲方波,其中A、B脉冲相位相差90°。若B相脉冲滞后A相为正转,相反B相脉冲超前A相脉冲则为反转。三组方波脉冲图如下。
2.4 推杆气动控制回路
气动推杆机构,选用的是两位五通的单电控电磁阀,安置于汇流板上。当电磁阀断电后,推杆会在弹簧力的作用下,自动回复至初始位置。下图中的1B1、2B1和3B1分别安置在对应推杆气缸的极限工作位置的磁感应接近开关,用于检测推杆是否工作到位。1Y1、2Y1和3Y1则是推杆气缸电磁阀的电控端,控制推杆是否执行推料入槽的动作。
2.5 西门子PLC的I/O口分配与接线图
作为西门子S7-200的升级版,新的模块化SIMATIC S7-1200控制器可实现简单却高度精确的自动化任务,并实现了模块化和紧凑型设计,功能强大,适合各种应用。分拣系统选用的是S7-1214C DC/DC/DC,订单号为6ES7 214-1AE30-0XB0。分拣系统电气接线图如图9所示。
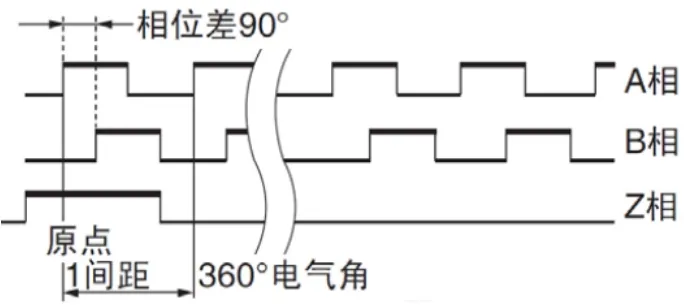
图7 增量式脉冲编码器输出的三组方波脉冲

图8 推杆气动控制回路工作原理图
3 系统软件设计
3.1 脉冲当量测试
为了实现输送带精准输送包裹至指定推料槽口,采用光电编码器对步进电机脉冲数进行计数,分拣系统选用的光电编码器采用A/B正交反相计数。通过实验测量数据,建立以下数学模型求解脉冲当量。

其中,µ为脉冲当量值,xj表示第j次高速计数器测量的脉冲数,yj表示第j次测量的包裹移动的实测距离。实验测量的数据如表2所示,最终测得脉冲当量为0.2585。
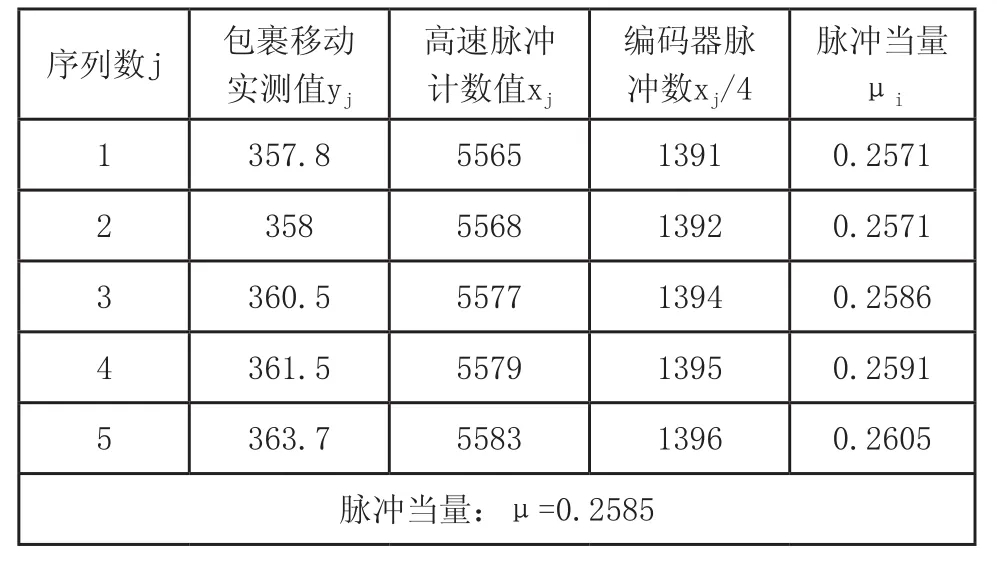
表2 脉冲当量测试数据
系统的输入信号包括:旋转编码器(I0.0~I0.2)、入口物料检测(I0.3)、启动按钮(I0.5)、停止按钮(I0.6)、推杆到位检测1#~3#(I0.7~I1.1)、首重1kg以下(I1.2)、续重2kg以内(I1.3)、续重3kg~5kg(I1.5)。
系统的输出信号包括:输送带启动(Q0.0)、推杆1~3电磁阀(Q0.4~Q0.6)、传送带1~3电机(Q0.7~Q1.1)。
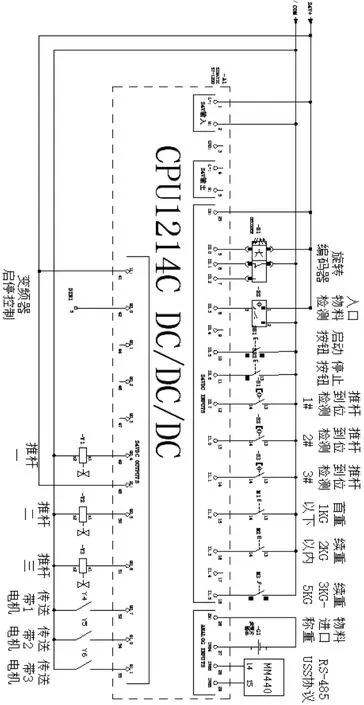
图9 分拣系统电气接线图
根据图1所示的安装布置距离计算光电编码器输送包裹至各位置所需的脉冲数:包裹从物料导向器至称重传感器,编码器[8]发出455个脉冲;输送至推杆1,编码器发出648个脉冲;输送至推杆2。编码器发出1017个脉冲;输送至推杆3,编码器输送1356个脉冲。
若分拣系统分拣种类较多,可增加推杆数与传送带数,本系统主要研究上述三种分拣类型。
3.2 USS_PORT功能块编程
USS通信协议,是按照串行总线的主从通信原理进行通讯访问的。USS_PORT功能块是用来处理USS网络上的通信,是西门子S7-1200与MM440变频器的通信接口。
BAUD设定值是和MM440变频器通信的频率,设定为9600baud/s。USS_DB引用的是如图11所示的用户程序放置的USS_DRV指令中的背景数据块。

图10 USS_PORT功能块编程图
3.3 USS_DRV功能块编程
USS_DRV指令中,通过PLC中输入单元的I0.5和I0.6控制变频电机的启动与停止。变频器设定的频率值和实际速度反馈值分别存放在MD20、MD30中,可通过组态界面进行修改与显示。考虑到输送带速度降为0的过程所消耗时间对运动精准性的影响及短时间降速损害步进电机使用寿命等因素后,设定变频器斜坡上升时间与下降时间分别为3S、2.5S,其他详细参数设置如表1所示。
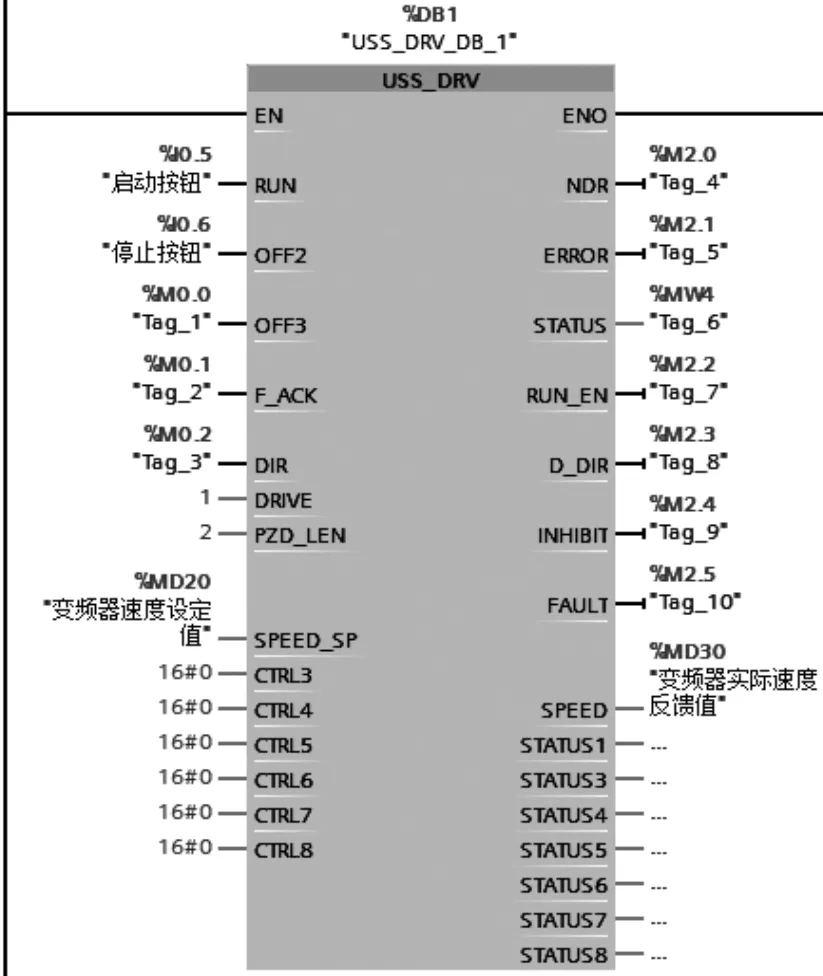
图11 USS_DRV功能块编程图
3.4 HSC_1高速计数器及功能梯形图
入料口检测到包裹后,启动输送带。执行输送任务。此时,旋转光电编码器开始计算脉冲数。当脉冲数达到648,即称重传感器所在位置的脉冲数,系统停止电机运行并延时。3S延时到,称重传感器已完成将微变化的模拟量电压信号转变为PLC输入单元的开关量信号。此时,继续运行输送带电机,执行输送任务。梯形图如图13所示。

图12 CTRL_HSC_1_DB功能块

图13 称重检测转换梯形图

图14 包裹流向选择判断梯形图
图14所示的梯形图中,通过比较MD80中的当前脉冲数与MB52设定的脉冲数,满足MD80中脉冲数≥MB52中设定的脉冲数,即推杆1位置对应的脉冲数,执行推送包裹进入传送带的任务。MB52、MB54和MD56设定的脉冲数分别为648、1017和1356。
图15所示的梯形图程序,以推杆1为例。推杆1推送物料到位后,限位检测的磁性开关得电,即I0.7得电。PLC中的程序是基于循环扫描方式执行的,所以系统首先复位Q0.4推杆1电磁阀,使推杆1回复到初始位置。然后,启动传送带1电机,执行传送包裹的任务。
4 结束语
本论文从实际角度出发,为了解决目前快递行业在分拣高峰期依赖人工分拣所产生的暴力分拣方式,设计基于PLC与USS通信协议的柔性分拣[7]系统。选用西门子S7-1214C型号PLC产品与MM440变频器,借助称重传感器与UNI800C之间的开关量转换,完成将压力微信号转换为PLC输入模块的开关量信号的目的。同时基于USS通信协议的RS485串口通信控制,可以很好的实现无级调速,大大降低了包裹分拣过程中的冲击载荷。此外,为了更好的实现柔性分拣过程,构建了光电编码器脉冲当量的数学模型,通过大量的数据采集计算,得到脉冲当量的数值。依据脉冲当量计算的脉冲数,精准的实现推杆与包裹的最佳受力接触点,完成柔性分拣的目的。综上所述,本文对实现柔性分拣有着重要意义。
