内窥镜夹持机器人驱动电机参数的确定*
2018-10-10赵中华
□ 王 琰 □ 赵中华
上海工程技术大学机械工程学院 上海 201600
1 研究背景
医疗机器人的发展推动了国民生活水平的提高。微创手术中的腹腔内窥镜手术,只需要在患者腹部打三四个直径为2~3 mm的孔,出血量小,伤口愈合快,极大减轻了病人的痛苦[1]。在微创手术中,内窥镜相当于医生的眼睛。在手术过程中,要求内窥镜能够提供合适的手术视野给医生,同时还要保证提供稳定清晰的画面,这对内窥镜夹持机器人的动态特性提出了较高的要求。医疗器械的电机选型问题比通用电机选型要求高,不仅要求电机体积小,而且由于使用环境比较极端,要求电机具有便于消毒、噪声小、启停频繁、精确度高、可靠性高等特点。笔者主要针对内窥镜夹持机器人的运动特点,结合医疗环境等相关影响因素,使用Adams仿真软件进行运动学仿真,并使用MATLAB软件进行数据处理,最终确定其驱动电机的参数,为医疗器械电机选型提供参数确定方法,在保证机器人功能的前提下,最大程度降低成本,缩短设计周期。
2 内窥镜夹持机器人概述
目前微创手术已经得到了普遍应用,医疗器械的自动化程度逐渐提高。腹腔内窥镜手术中,对内窥镜的夹持是非常重要的,内窥镜夹持机器人如图1所示。内窥镜夹持机器人在手术过程中共需要四个自由度,即内窥镜通过穿刺点后,能够围绕穿刺点进行X轴、Y轴方向的转动,沿穿刺点轴向的直线运动,以及内窥镜自身的转动[2]。对内窥镜夹持机器人的要求为体积小,可靠性高,与医生的交互性好,在手术过程中能够不干扰医生的操作,灵活性高。
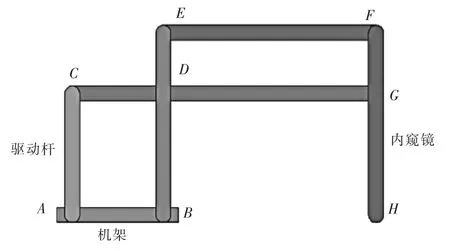
内窥镜夹持机器人要求围绕穿刺点进行转动,因此采用双平行四边形单自由度运动方式。竖直方向的转动通过整体结构的翻转来实现,夹持内窥镜的末端直线运动通过滚珠丝杠或者导轨滑块等结构实现。内窥镜在腹腔手术过程中需要进行小幅度缓慢转动,当达到医生所需要的位置后,要求能够保持长时间的固定姿态或者小幅度调整,最终为医生提供清晰稳定的画面。实现围绕穿刺点进行转动的结构如图2所示,杆通过铰链固定在支架上为驱动杆为末端执行件,连杆通过铰链连接在杆及末端执行件上。当驱动杆件转动角θ时,末端执行件也相应转动角θ。
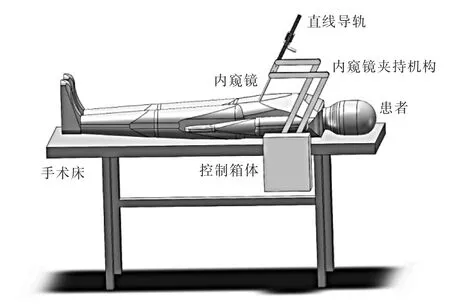
▲图1 内窥镜夹持机器人

▲图2 绕穿刺点转动结构示意图
3 传统伺服电机选型步骤
伺服电机广泛应用于机床及汽车等机械行业,作为动力的核心部件,选型的合理性关系到生产成本和产品质量[3]。对伺服电机进行选型的主要步骤如下:①根据机械结构特点,计算各构件的转动惯量,并折算到总电机轴上,得到需要的总转动惯量;②当机器空载运行时,折算各构件的负载转矩,最终计算出电机轴所需要的负载转矩;③当机器承受最大载荷作用时,计算出电机轴需要的负载转矩;④根据实际工作需要,以最大负载转矩作为等效负载转矩。
4 医用电机选型要点
传统的伺服电机选型,通常根据惯量折算、扭矩折算等公式表格来计算等效转动惯量及等效负载转矩,计算量大,对使用的工作环境要求不高,而且精度与可靠性要求较低。在医疗器械的驱动电机选型问题上,可靠性和精确度是最为关键的影响因素。在医疗器械驱动电机选型时,还需要保证机器能够运行平稳,便于消毒。笔者主要简化内窥镜夹持机器人结构,利用SolidWorks软件进行建模,导入Adams软件进行运动学仿真与求解,并利用MATLAB软件对驱动电机参数进行精确计算与合理的数据处理,优化机器人的运动特性,缩短设计周期。
5 夹持机器人建模与求解
5.1 建模与仿真
利用SolidWorks、软件Adams View 2016软件分别对内窥镜夹持机器人进行建模和仿真。
5.1.1 设置工作环境
设置单位为“MMKS”,设置重力方向为-Y轴,重力值默认。
5.1.2 构建模型
笔者主要利用SolidWorks软件进行建模,在构建内窥镜夹持双平行四边形结构过程中,忽略精确尺寸和形状,用简单铰链代替复杂的关节连接及内窥镜的夹持结构。建立简单模型后,生成Parasolid(*.x_t)中间文件,将中间文件导入Adams软件,具体结构如图3所示。导入的结构只具有外形特征,因此需要进一步对杆件属性进行赋值。
5.1.3 施加约束
图3中 A、B、C、D、E、F、G 处都采用转动铰链约束。
▲图3 内窥镜夹持机器人结构简图
5.1.4 添加驱动
根据内窥镜夹持机器人的运动特征,确定绕穿刺点转动的一个运动周期。驱动杆在竖直状态为初始状态,θ为π/2。在逆时针旋转时,用正向角表示。一个运动周期为60 s,驱动杆的角位移函数以Y轴正方向为起始位置,具体如式 (1)所示,同时利用MATLAB软件进行数据处理,得到角度时间关系曲线,如图4所示。
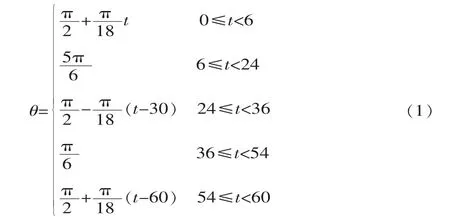
式中:t为时间,s。
在Adams软件中添加驱动杆的角位移函数,软件默认驱动杆竖直状态角位移为0,具体函数为:

▲图4 驱动杆AC角度时间关系曲线

5.1.5 运动学仿真
对内窥镜夹持机器人机构进行运动学仿真,设置时长为60 s,步数为2 000,步数值可以根据观察需要进行修改。
5.2 驱动转矩与等效转动惯量
通过Adams软件能够直接仿真出双平行四边形机构驱动杆的转矩,而仿真得到的等效惯量只是将双平行四边形机构的总动能转化到驱动杆上,获得与转动惯量拥有相同量纲的数值,但并非是真正的转动惯量[4]。双平行四边形机构的总动能E可以根据动能定理计算得到:

式中:E1、E2、E3、E4、E5依次为杆件的动能。
E1~E5动能数值都可以通过Adams软件仿真直接得到,然后利用MATLAB软件进行计算,得到总动能。

式中:ω1为驱动杆的角速度。
5.3 仿真结果分析
在对双平行四边形机构仿真之后,可以从Adams软件中提取出驱动转矩、功耗等相关参数,总动能及等效转动惯量可以根据式(2)、式(3)计算得到。
5.3.1 驱动转矩与功耗
图5所示为双平行四边形机构在一个运动周期内驱动转矩T与时间的关系曲线。当驱动杆逆时针转动时,转矩是负值,且随转动角度的增大而减小。在双平行四边形机构的一个运动周期内,转矩是对称变化的,转矩的最大绝对值为11.91 N·m。双平行四边形机构驱动电机功耗P与时间的关系曲线如图6所示。由于转动过程中角速度和转动角度都是对称相等的,因此功耗也是正功和负功对称相等的,且都是在运动到极限位置时达到最大值,约为2.07 W。
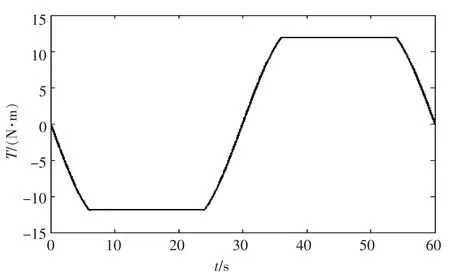
▲图5 驱动转矩时间关系曲线
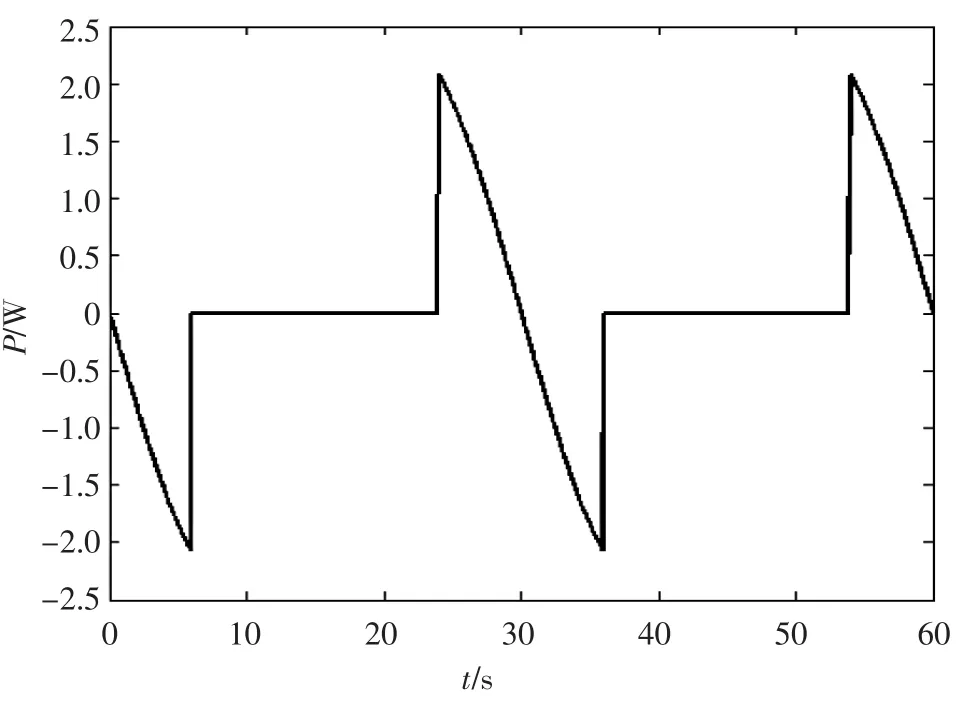
▲图6 功耗时间关系曲线
5.3.2 动能与等效转动惯量
双平行四边形机构总动能E与时间关系曲线如图7所示。总动能根据式(2)计算得到,其中每个运动杆件的动能是通过Adams软件获取的。等效转动惯量J与时间关系曲线如图8所示。需要注意的是,等效转动惯量可通过式(3)计算得到,最大等效转动惯量为128.49 N·m·s2。当内窥镜在一个运动行程结束以后,需要保持静止一段时间,为医生的手术操作预留时间。当机构保持静止时,动能为0,同时等效转动惯量也为0,对整体电机参数确定的影响可以忽略不计。
6 驱动电机参数确定
驱动电机应用在微创手术机器人方面,要求具有可靠性高、体积小、响应快、精度高、运行噪声小等特点。对驱动电机参数进行较为精确的计算是进行选型的关键一步。有效利用现有软件工具,结合经验理论计算,可以快捷确定内窥镜夹持机器人的驱动电机参数。

▲图7 总动能时间关系曲线
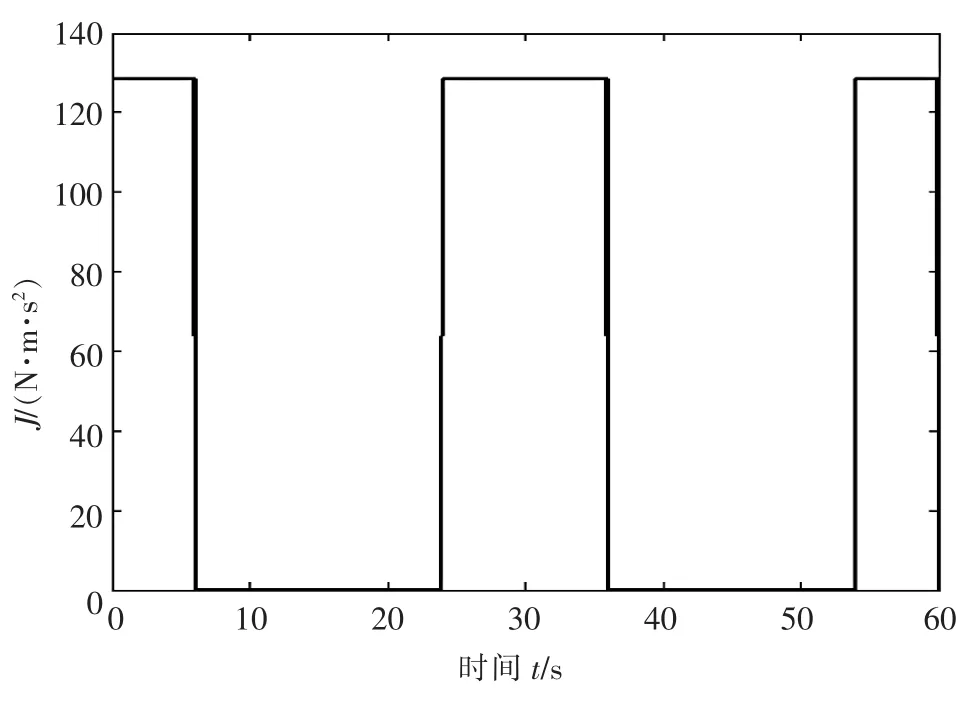
▲图8 等效转动惯量时间关系曲线
6.1 额定转矩
转矩容量的选择有多个原则,平均转矩可以根据转矩的变化规律,采用均方根转矩计算[5]:

式中:tp为一个负载工作的周期时间;T为瞬时转矩;Trms为平均转矩。
用Adams软件进行仿真,导出数据,再利用MATLAB软件进行数值求解,得到平均转矩为79.46 N·m。选择的额定转矩要大于平均转矩,计算额定转矩TR采用相关经验公式:

式中:K1为安全因数,一般取K1=1.2;K2为转矩波因数,矩形转矩波因数取K2=1.05,三角形转矩波因数取K2=1.67,图5所示的梯形转矩波因数取K2=1.4。
6.2 转动惯量
负载转动惯量JL直接影响伺服电机的灵敏度、系统精度和动态性能。手术过程中需要电机有高的灵敏度,人机交互友好,因此主要考虑选取惯量较小的伺服电机。
电机转子的转动惯量JM与负载转动惯量JL满足下式:

得到准确的转矩及等效转动惯量之后,结合电机转动所需要的转速选择减速器。由于医疗机器人要求精度高且可靠性高,因此需要搭配相应的编码器进行控制和调节。综合而言,采用体积小、质量轻及可靠性高的电机是最佳选择[6-8]。
7 结论
选用Maxon电机,以及与之配合使用的编码器与控制器,制作内窥镜夹持机器人样机。试验证明,Maxon电机能够快速响应,驱动内窥镜夹持机器人样机精准地运行。
针对医疗器械上使用的驱动电机的参数确定问题,还没有比较成熟的体系。通过使用相关软件与经验公式,可以得到较为精准的驱动电机相关参数[9-10],大大减少计算量,提高工作效率,缩短设计周期。
