行星轮系滑道式钵苗栽植机构设计与参数优化
2018-10-10姬江涛杨林辉王景林
姬江涛,杨林辉,金 鑫※,高 颂,庞 靖,王景林
行星轮系滑道式钵苗栽植机构设计与参数优化
姬江涛1,2,杨林辉1,金 鑫1,2※,高 颂1,庞 靖1,王景林1
(1. 河南科技大学农业装备工程学院,洛阳 471003;2. 机械装备先进制造河南省协同创新中心,洛阳 471003)
直立度是钵苗移栽作业质量的重要评价指标,目前存在栽植机构容易造成钵苗倾斜影响栽植直立度下降,导致钵苗成活率降低的问题,针对这一问题,该文结合钵苗种植的农艺要求,以番茄钵苗物理特性为依据,提出了栽植机构的设计要求,设计了一种行星轮系滑道式栽植机构。该机构通过行星轮系和滑道的配合,以打穴放苗的方式完成钵苗栽植,并对该机构的作业过程进行分析,建立了机构的运动学模型。基于Matlab编写了栽植机构辅助分析优化软件,对机构的栽植轨迹和结构参数进行优化,得到了一组满足钵苗栽植农艺要求的最优结构参数组合:太阳轮半径0=20 mm、中间轮半径1=15 mm、行星轮半径2=10 mm、连杆的长度1= 100 mm、栽植臂上杆的长度2=150 mm、栽植臂上杆的长度3=80 mm、栽植器的长度4=140 mm、滑道上点到坐标原点的距离5=100 mm、行星架的初始安装角0=45°、连杆与轴方向上的夹角1=148°、栽植臂上杆与杆的夹角= 176°、滑道与轴方向上的夹角=108°。在此组合下,完成了对栽植机构的结构设计和虚拟装配,并导入ADAMS中进行机构的虚拟运动和仿真分析,验证了机构设计的合理性和准确性。依据优化所得参数生产了物理样机,并以钵苗直立度为主要检测指标进行了田间试验。试验结果表明:在机组前进速度450 mm/s ,栽植频率74 株/min时,钵苗移栽直立度较高,优良率为94%,满足栽植性能要求。研究结果可为蔬菜钵苗移栽机栽植机构的设计提供参考。
农业机械;优化;试验;行星轮系滑道;栽植机构;仿真分析
0 引 言
钵苗移栽技术凭借着可以缩短作物生长周期,提高幼苗的成活率,增加作物产量等优势,正在被广泛应用于农作物种植生产过程中[1-4]。应用移栽机械虽然能够降低劳动强度,提高作业效率,但是现有的钵苗移栽机栽植机构,普遍采用鸭嘴栽植器以打穴放苗的方式进行栽植作业,存在因栽植器鸭嘴尖端带苗、栽植轨迹环扣较大等原因导致的钵苗栽植直立度不高等问题[5-8]。
栽植机构作为移栽机的核心部件,直接影响着作物种植质量[9-13]。因此,为了提高钵苗的栽植直立度,提升作业移栽质量,许多学者对栽植机构进行了大量的研究:陈建能等[14]提出一种多杆式零速度钵苗移栽机植苗机构,虽然其栽植轨迹下部的重合部分较长,能够满足较高地钵苗栽植直立度要求,但是在栽植过程中栽植器受栽植速度的影响会产生摆动,进而降低栽植质量;俞高红等[15]设计了一种适用于大株距蔬菜钵苗的行星轮系旋转式栽植机构,该机构作业时由传动机构驱动行星齿轮系带动行星架回转,进而带动栽植臂旋转并保证水平,虽然其在高速作业下振动和冲击较小,但栽植轨迹环扣较大,栽后钵苗直立度合格率一般小于90%;何亚凯等[16]设计了一种凸轮摆杆式栽植机构,该机构虽然钵苗栽植直立度优良率在90%以上,但其凸轮结构精度要求高,加工制造难度较大;金鑫等[17]设计了一种移栽机曲柄滑槽式栽植机构,该机构虽然结构简单,调整方便,钵苗栽植直立度优良率超过93%,但其栽植频率只有60株/min,移栽效率相对较低。
基于以上研究分析,本文以番茄穴盘苗为研究对象,结合钵苗种植农艺要求,在探究其钵苗物理特性的基础上,提出栽植机构的设计要求,设计了一种行星轮系滑道式栽植机构。工作时,鸭嘴栽植器在行星轮系和滑道共同作用下,按照设计的轨迹和姿态以打穴放苗的方式将钵苗栽植入土,同时,通过对该机构进行运动学分析、结构参数优化、仿真分析以及田间试验验证机构设计的合理性,以期为以后蔬菜钵苗移栽机栽植机构的研发提供理论参考。
1 番茄钵苗物理特性分析
钵苗物理特性是栽植机构优化设计最基本的依据,因此设计栽植机构时应充分考虑钵苗自身的特点,如苗钵高度、叶展宽度、钵体尺寸和质量等。例如设计栽植机构的鸭嘴栽植器长度时应充分考虑苗钵高度;钵体尺寸决定着鸭嘴栽植器在土壤里打孔的深度及大小;叶展宽度对鸭嘴栽植器的挂苗、带苗有影响等[18-20]。
本研究以番茄穴盘苗为研究对象,通过对同等培养条件下适栽苗龄的穴盘苗的苗钵高度、叶展宽度、穴盘苗质量及钵体尺寸等基本物理特性参数进行测量及统计分析,为鸭嘴栽植器的外形尺寸优化设计提供参数依据。
1.1 材料与方法
试验材料为常见的用于移栽种植的番茄穴盘苗,品种是合作906粉果型番茄:育苗穴盘采用常用的128穴标准通用穴盘,穴孔为正方形椎体,穴深42 mm,上下口径分别为 30 mm×30 mm和15 mm×15 mm;育苗基质FNZ(泥炭与珍珠岩成份体积比2:1,播种后采用蛭石覆盖)。
试验方法:将穴盘苗从穴盘中轻轻拔出后平置,穴盘苗在自然状态下,测得基质底部至穴盘苗顶部的尺寸为穴盘苗高度,穴盘苗叶自然伸开状态下叶片的最远距离为叶冠直径,苗和基质的总质量为穴盘苗质量,钵体下端尺寸为,上端尺寸为,钵体高度为1,如图1所示。试验时,选取苗龄为40 d左右,钵体的含水率为35%,长势良好适合移栽的穴盘苗3盘共540株,从中随机抽取50株,对穴盘苗高度、叶冠直径、穴盘苗质量以及钵体尺寸进行测量,测量工具为量程0~20 cm,最小刻度为1 mm的三角板;电子秤型号为YP202N的电子天平,量程200 g,最小分度0.01 g。每株每个特性因素测量2次,取其平均值记录数据。
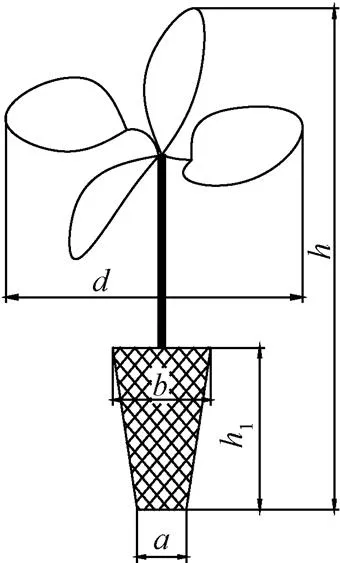
注:a为钵体下端尺寸,mm;b为钵体上端尺寸,mm;d为叶展宽度,mm;h为苗钵高度,mm;h1为钵体高度,mm。
1.2 结果与分析
表1为番茄穴盘苗的物理特性参数测试结果,由表1可知,同一环境培养出来的番茄穴盘苗,在高度、叶展宽度、质量以及钵体尺寸等方面的区别不大,同时钵苗这几项物理特性,可为下文中栽植机构结构参数的优化设计提供参考。
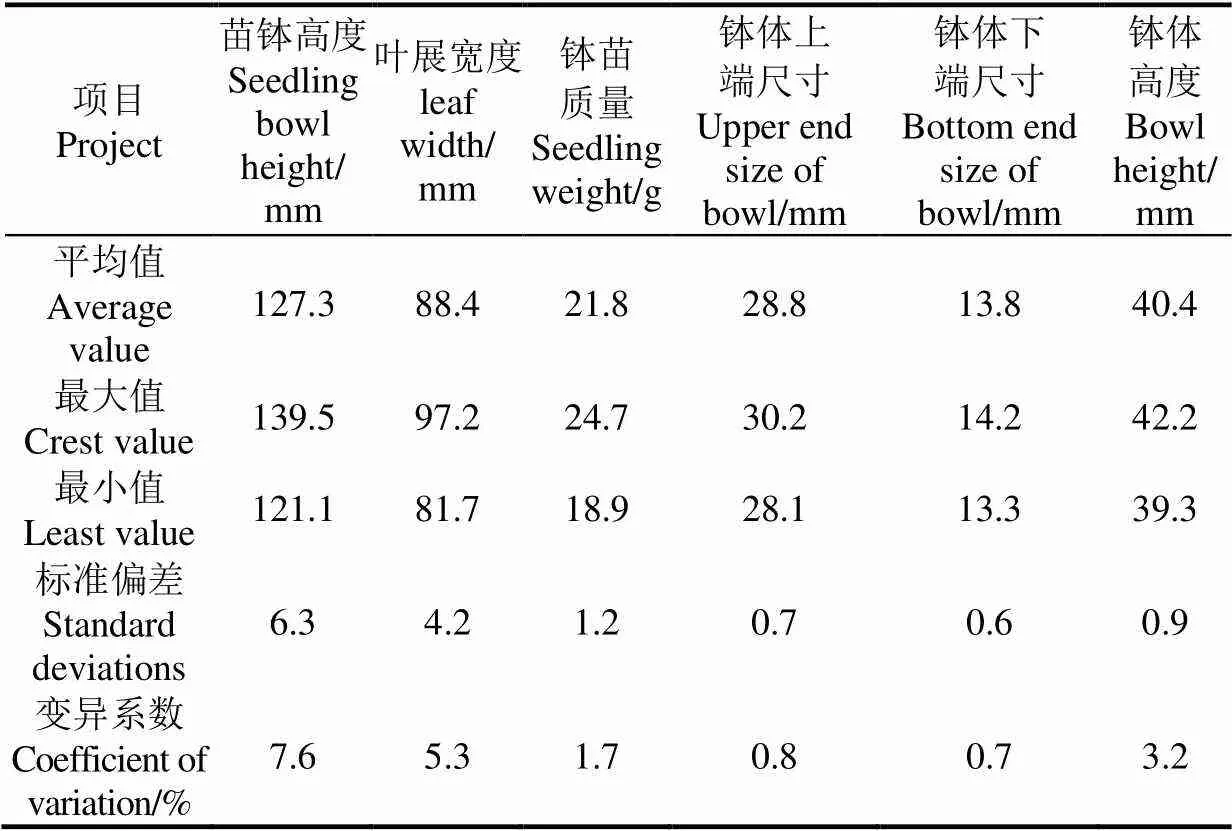
表1 番茄穴盘苗物理特性参数测量统计结果
2 栽植机构设计
2.1 设计要求
栽植机构的作用主要是将人工或取苗机构投下的钵苗,在保证其完好的情况下栽植入土。因此所设计的栽植机构,要求鸭嘴栽植器能够以某种特定的运动轨迹进入栽植平面、打孔开穴、栽植钵苗以及完成周期性运动等复杂的作业任务[21-22],具体设计要求如下
1)鸭嘴栽植器的运动轨迹
接苗时,鸭嘴栽植器应尽量靠近投苗点,也就是鸭嘴栽植器在轨迹的最高点处进行接苗,以避免钵苗土钵掉落到鸭嘴栽植器时造成损伤。栽苗时,为保证钵苗栽植直立度,鸭嘴栽植器在插入和离开土层时,与栽植平面形成的角度应尽量接近90°,且二者角度不能相差太大。
2)鸭嘴栽植器的开合状态
由于鸭嘴栽植器的主要作用是运苗和打穴开孔,因此,鸭嘴栽植器在接苗前、接苗后、运苗以及打穴阶段都要处于闭合状态,当鸭嘴栽植器打完穴处于最低点时,鸭嘴栽植器张开扩孔释放钵苗,然后离开穴孔至鸭嘴栽植器最低点高于钵苗顶端一段距离后(下次接苗前),重新闭合,以免损伤钵苗苗体。
2.2 栽植机构工作原理
根据设计要求,以多连杆式移栽机构为基础,利用行星轮系和滑道的配合,采用打穴放苗的方式,设计出如图2所示的栽植机构运动简图。从图2中可以看出,该机构由行星轮系驱动装置、连杆、栽植臂、滚子滑槽机构和鸭嘴栽植器组成。其中,行星轮系驱动装置由铰接在行星架上的太阳轮、中间轮及行星轮组成,连杆的一端与行星轮的齿轮轴固接,另一端与栽植臂的中间铰接于点,所述栽植臂的一端安装有鸭嘴栽植器,另一端设置有滚子与滑槽形成约束。
栽植机构工作时,太阳轮固定不动,动力驱动行星架绕太阳轮逆时针旋转,中间轮与太阳轮啮合随行星架绕太阳轮逆时针旋转,同时逆时针自转,行星轮与中间轮啮合绕太阳轮旋逆时针旋转,同时顺时针自转,行星架的旋转带动连杆转动同时带动栽植臂运动,栽植臂在滚子滑槽机构的约束下,其另一端安装的鸭嘴栽植器以一定的轨迹在一个平面内进行运动。
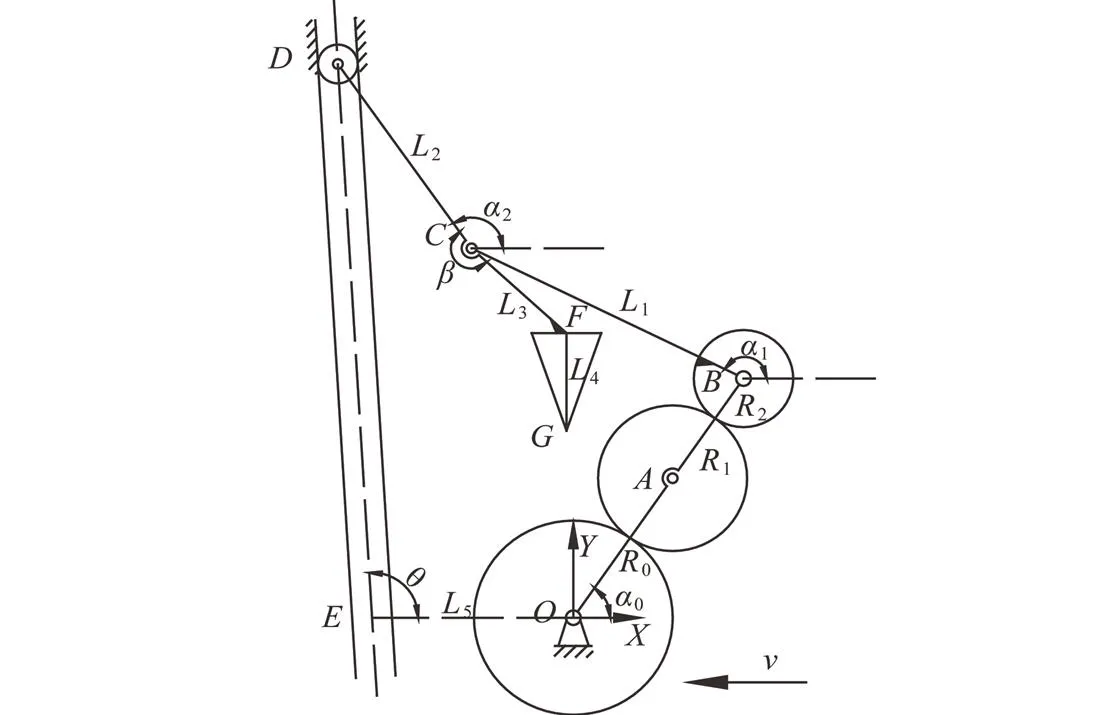
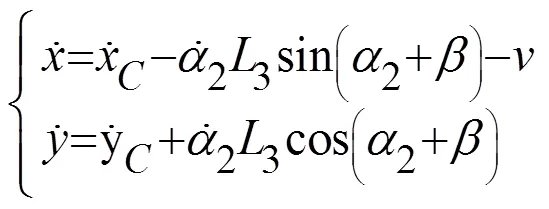
注:XOY为栽植机构数学建模的坐标系;O点为栽植机构的固定铰接点,A、B、C、D点为栽植机构的活动铰接点,E点为过坐标原点O的水平线与滑道DE的交点,F点为焊接点,G点为栽植点,v为机组前进速度,mm.s-1;R0为太阳轮半径,mm;R1为中间轮半径,mm;R2为行星轮半径,mm;L1为连杆BC长度,mm;L2为栽植臂CD杆长度,mm;L3为栽植臂CF杆长度,mm;L4为鸭嘴栽植器FG长度,mm;L5为滑道DE到坐标原点O的垂直距离,mm;α0为行星架OB的初始安装角,(°);α1为连杆BC的初始安装角,(°);β为栽植臂上杆DC与杆CF的夹角,(°);θ为滑道DE与X轴方向的夹角,(°)。
鸭嘴栽植器开合动作主要由图3a所示的凸轮摇杆机构以及滑槽双摇杆机构来完成,通过凸轮1驱动摇杆2往复转动,当鸭嘴栽植器点运动到最低点时,摇杆2通过连杆3,拉动栽植器5,经栽植器上滑槽4的作用,鸭嘴栽植器5、6分开,释放钵苗7,使其落入孔穴;当鸭嘴栽植器完成植苗动作,在运动到下次接苗前,摇杆2通过连杆3,推动鸭嘴栽植器5,经滑槽4,鸭嘴栽植器5、6合并,以备接苗和运苗,直至下次投苗。
2.3 作业过程分析
工作时,要求鸭嘴栽植器运行至最高点时,钵苗落入鸭嘴栽植器,随鸭嘴栽植器向下运动,当运行至最低点处时,鸭嘴栽植器打开释放钵苗,使其落入由鸭嘴栽植器打好的孔穴中,然后返回至最高点,开始对下一个钵苗进行栽植。图3b所示为栽植机构栽苗静轨迹示意图,整个作业周期可以分为接苗、运苗、栽苗和回程4个阶段[23]:
接苗:点为栽苗静轨迹的最高点,此时鸭嘴栽植器的线速度为0,能够实现零速接苗,确保准确接苗的过程中不损伤钵体。
运苗:为运苗阶段,要求钵苗在鸭嘴栽植器中的位置应尽量偏低,以方便鸭嘴栽植器打开时能快速的将钵苗释放到穴孔中。
栽苗:点为栽苗静轨迹的最低点,此时的鸭嘴栽植器线速度也为0,打穴开孔的同时实现零速投苗,以保证栽植后的钵苗直立度。
回程:为回程阶段,鸭嘴栽植器投苗之后离开土壤时,应尽量保持与地面垂直,以避免鸭嘴栽植器碰到钵苗,影响钵苗的栽植直立度。回程至点时鸭嘴栽植器闭合,开始进行下一个作业周期。

注:1.凸轮 2.摇杆 3.连杆 4.滑槽 5、6.鸭嘴栽植器 7.钵苗G点为栽植点
3 栽植机构运动模型分析
为了便于分析栽植机构鸭嘴栽植器点的静轨迹和动轨迹的运动状态,以太阳轮旋转中心作为坐标原点(如图2所示的直角坐标系),设水平方向为轴且轴正方向与机组前进方向相反,垂直方向为轴,定义逆时针转动方向为正。在分析栽植机构的运动学模型过程中,以太阳轮为原动件,假设各零件为刚性结构,不发生弹性变形;不考虑各转动副之间的转动间隙[24]。
3.1 位移方程
建立栽植机构的矢量方程

将矢量方程转化为解析形式,则有
点的位移方程为

式中0为太阳轮的分度圆半径,mm;1为中间轮的分度圆半径,mm;2为行星轮的分度圆半径,mm;0为的初始安装角, (°);为转过的角度, (°);点位移方程为
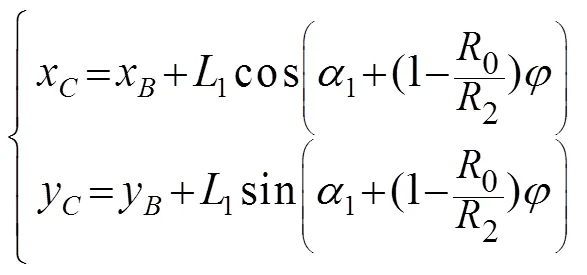
式中1为连杆的长度,mm;1为连杆与轴方向上的夹角, (°);点位移方程为
式中2为栽植臂上的长度,mm;2为栽植臂上杆与轴上的夹角, (°);点位移方程为

式中5为滑道上点到原点的距离,mm。
由于
式中为滑道的倾角, (°)。
整理可得


点位移方程为

式中3为栽植臂上杆的长度,mm;为栽植臂杆的夹角, (°)。
栽植器下端点位移方程为

式中4为鸭嘴栽植器的长度,mm。
考虑到机组工作时的前进速度为,mm/s,则点的运动轨迹方程为

3.2 速度和加速度曲线方程
根据上述建立的栽植机构鸭嘴栽植器点的位移方程,以时间为参数变量,对式(11)分别进行一次和二次求导,可出鸭嘴栽植器点的速度和加速度方程。
鸭嘴栽植器点的绝对速度方程为
鸭嘴栽植器点的绝对速度方程为

4 栽植机构的参数优化
4.1 计算机辅助优化程序设计
鉴于鸭嘴栽植器底部的运动轨迹和接苗、入土、落苗、出土时的位置及姿态严重影响着钵苗的栽植效果,根据所建立的运动数学模型,基于Matlab开发了栽植机构辅助分析优化程序[25-26](如图4所示)。该程序界面共包含参数输入区、控制部分区和图形显示区(图4a~4d)3个部分,通过在参数输入区内输入机构参数,然后选取控制部分区域内的相关功能按钮,软件将会在图形显示区内模拟当前参数下机构运动仿真,从而得到鸭嘴栽植器点在不同参数条件下的运动轨迹、速度和加速度曲线。
图4 栽植机构辅助分析优化程序界面
4.2 优化目标与变量
根据钵苗物理特性和设计要求,为了使设计的行星轮系滑道式栽植机构能够满足农艺种植要求[27-29](番茄的农艺种植要求是株距300~400 mm,栽深60~70 mm),具体需考虑以下优化目标:
1)栽植器的长度应大于钵苗的高度,试验所测得的钵苗高度的最大值为139.5 mm;
2)栽植器底部栽植点点运动轨迹的入土段和出土段应尽量重合,且与栽植平面近似垂直;
3)为了机构设计的紧凑性和符合农艺要求,整个轨迹的高度应在300 mm左右,轨迹长度不应大于400 mm;
4)栽植机构在接苗阶段的轨迹应尽量呈水平状态,以保证栽植器接苗的平稳性。
利用所建立的栽植机构人机对话辅助分析程序,对栽植机构结构参数变量0、121234501和进行运动仿真,分析其对栽植器鸭嘴端运动轨迹的影响。
4.3 主要结构参数对栽植机构运动特性影响分析
基于Matlab辅助分析优化界面,利用人机交互的方式,分析栽植机构主要结构参数对栽植机构植苗轨迹的影响规律,图5所示为机组工作速度为450 mm/s时,部分主要变量在不同取值下的运动轨迹比较图(图中左侧运动轨迹为栽植机构的静轨迹,右侧运动轨迹为栽植机构的动轨迹)。

图5 不同结构参数对栽植轨迹的影响
连杆长度1对鸭嘴栽植器底部栽植点点的栽植轨迹影响规律如图5a所示。当0= 20 mm、1= 15 mm、2=10 mm、2= 150 mm、3= 80 mm、5= 100mm、0= 45°、1=148°、=176°、=108°时,随着长度1的减小,鸭嘴栽植器底部栽植点点的轨迹曲线高度由301 mm逐渐降低到282 mm,入土深度(地面到轨迹线最低点距离)由66 mm逐渐减小至54 mm,轨迹形状由“γ”型演变成“V”型[31],栽植器后鸭嘴将会对钵苗造成挂带现象,影响钵苗直立度(幼苗栽植入土后与水平地面的夹角);随着长度1的增加,栽植器底部栽植点点的轨迹曲线高度由301 mm逐渐增加到323 mm,,入土深度(地面到轨迹线最低点距离) 由66 mm逐渐增加至78 mm,轨迹形状由“γ”型演变成环扣型,栽植器前鸭嘴将会对钵苗造成挂带现象,影响钵苗直立度。
行星架的初始安装角0对鸭嘴栽植器底部栽植点点的栽植轨迹影响规律如图5b所示。当0= 20 mm、1= 15 mm、2=10mm、1= 100 mm、2= 150 mm、3= 80 mm、5= 100 mm、1= 148°、=176°、=108°时,行星架的初始安装角0的变化,对栽植器底部栽植点点轨迹曲线高度和入土深度的影响较小;随着的初始安装角0的减小,鸭嘴栽植器底部栽植点点的轨迹曲线高度由301 mm逐渐降低到296 mm,入土深度(地面到轨迹线最低点距离)由66 mm逐渐减小至63 mm,轨迹形状由“γ”型演变成“V”型,且出现前倾现象,随着行星架的初始安装角0的增大,鸭嘴栽植器底部栽植点点的轨迹曲线高度由301 mm逐渐增加到306 mm,入土深度(地面到轨迹线最低点距离)由66 mm逐渐增加至68 mm,轨迹形状由“γ”型演变成环扣型,且出现后倾现象,可见该参数对钵苗的直立度(幼苗栽植入土后与水平地面的夹角)有较大影响。
连杆的初始安装角1对鸭嘴栽植器底部栽植点点的栽植轨迹影响规律如图5c所示。当0= 20 mm、1= 15 mm、2=10mm、1= 100 mm、2= 150 mm、3= 80 mm、5= 100mm、0= 45°、=176°、=108°时,随着的初始安装角1的减小,鸭嘴栽植器底部栽植点点的轨迹曲线高度由301 mm逐渐降低到286 mm,入土深度(地面到轨迹线最低点距离)由66 mm逐渐减小至64 mm,轨迹形状出现前倾现象,随着的初始安装角1的增大,鸭嘴栽植器底部栽植点点的轨迹曲线高度由301 mm逐渐增加到306 mm,入土深度(地面到轨迹线最低点距离)由66 mm逐渐增加至67 mm,轨迹形状出现前倾现象;的初始安装角1的变化,对轨迹形状和入土深度影响较小,对钵苗直立度(幼苗栽植入土后与水平地面的夹角)影响较大。
栽植臂杆与杆的夹角对栽植器底部栽植点点的栽植轨迹影响规律如图5d所示。当0= 20 mm、1= 15 mm、2=10 mm、1= 100 mm、2= 150 mm、3= 80 mm、5= 100 mm、0= 45°、1= 148°、=108°时,随着的夹角的减少,栽植器底部点轨迹高度逐渐降低,轨迹整体向右进行了平移,但对曲线形状和入土深度的影响较小。
最终,根据优化目标和所编写的栽植机构辅助分析优化程序,通过人机交互的方式,优化得到了一组满足钵苗栽植要求的结构参数,该组合为:0= 20 mm、1=15 mm、2=10 mm、1= 100 mm、2= 150 mm、3=80 mm、4= 140 mm、5= 100 mm、0= 45°、1= 148°、=176°、=108°。在该参数组合下,栽植机构运动轨迹的入土段和出土段基本重合,且都垂直于地面,栽植器在水平方向上的位移几乎为0,保证了栽植器在投苗阶段的时间为零,有利于满足钵苗的直立度要求。整个轨迹高度为298 mm,栽植深度为63 mm,移栽株距为365 mm,运动轨迹如图6a所示,其在水平方向的速度和加速度曲线如图6b、6c所示。
从图6b、6c中可以看出,栽植器在接苗点时,其水平方向上的速度接近于零,有利于栽植器平稳接苗,加速度较大,可以使栽植器在接苗后短时间内将速度提升至最大,以便快速运苗,同时加速度最大值接近4 m/s2远远小于重力加速度,说明在运苗过程中钵苗始终紧贴着栽植器,钵苗和栽植器的运动轨迹是一致的;栽植器在投苗点时,其在水平方向上的速度接近于0,有利于栽植器零速投苗,保证了钵苗的直立度,加速度较大,可以使栽植器尽快脱离钵苗,快速返程。
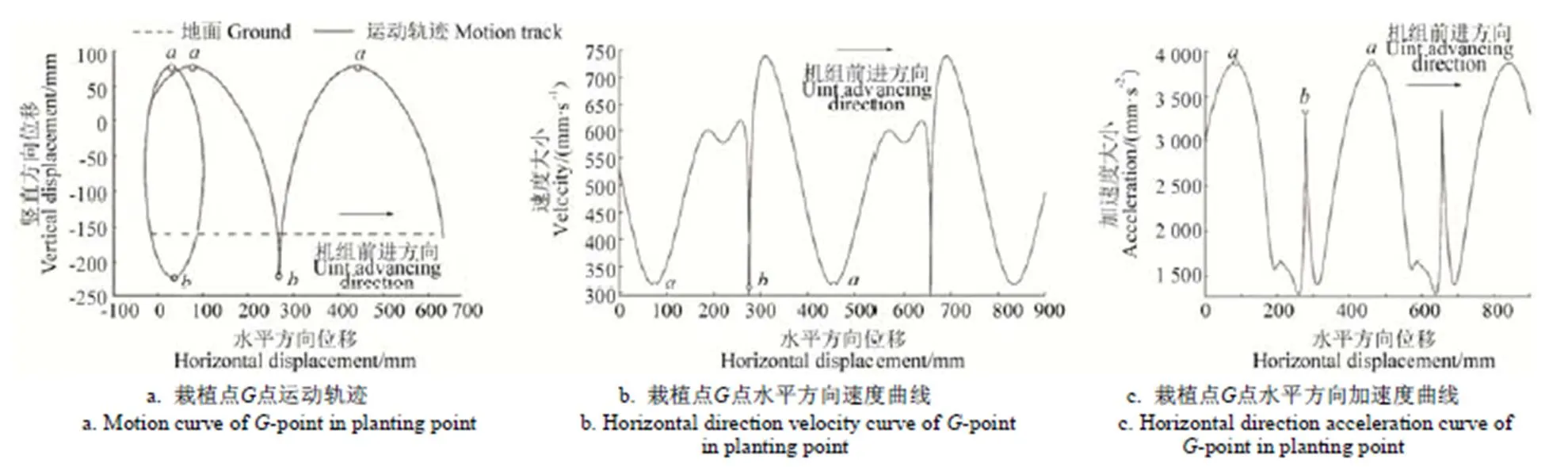
注:a为栽植机构接苗点;b点为栽植机构栽苗点。
5 栽植机构的设计与运动仿真
根据优化所得的栽植机构与结构参数,进行栽植机构虚拟样机的设计。
5.1 三维建模
5.1.1 关键部件设计
1)行星轮系设计
栽植机构工作时,行星轮系作为动力的输入,带动整个机构的做往复运动,主要包括行星架、太阳轮、中间轮和行星轮。

图7 行星轮系三维模型
由栽植机构参数优化部分可得:太阳轮1=20 mm、中间轮2=15 mm以及行星轮3=10 mm,取模数为2 mm,由=/2可得:太阳轮1=20、中间轮2=15以及行星轮3=10;箱体相当于行星轮系中的行星架,其结构尺寸大小主要由齿轮的中心距确定,在保证箱体强度的条件下,设计得到的行星轮系三维模型如图7所示。该行星轮系的传动比为1:2,工作时的转速为74 r/min。
2)鸭嘴栽植器设计
鸭嘴栽植器作为栽植机构的核心部件,根据设计要求可知,栽植器需要起到盛苗、运苗、打穴以及植苗的功能,为了提高钵苗栽植成功率和直立度,需要合理设计鸭嘴栽植器的尺寸和结构形状。
由钵苗物理特性可得:穴盘苗高度平均值为127.3 mm,叶冠直径平均值为88.4 mm,钵体尺寸为40.4 mm×28.8 mm×13.8 mm,锥形角为 10°。以此为参考设计的鸭嘴栽植器上口直径为130mm,下口直径为100 mm,可避免栽植器接苗时出现挂苗现象;栽植器底部设计的锥体角度为10°,与钵苗钵体角度相吻合,便于保证钵苗在栽植器内的直立度。如图8a所示为鸭嘴栽植器三维模型。
5.1.2 虚拟样机
在结构参数优化的基础上,对栽植机构进行结构设计,并利用SolidWorks2014完成对该机构的虚拟装配,得到如图8b所示的栽植机构三维模型,主要由机架、鸭嘴栽植器、行星轮系、连杆、栽植臂、栽植器开合机构和滑道组成。其中行星轮系、连杆、栽植臂和滑道控制鸭嘴栽植器进行接苗和栽苗的往复运动;栽植臂和栽植器开合机构控制栽植器的张开与闭合;鸭嘴栽植器负责接苗运苗打穴,并将钵苗栽植入土。

图8 鸭嘴栽植器及栽植机构虚拟样机
5.2 仿真分析
为了验证所设计栽植机构理论分析的正确性,将上述所建立的虚拟样机,转换格式后导入ADAMS软件中,通过添加各杆件之间的运动副,设置机组前进速度为450 mm/s,行星轮系输入轴转速为74 r/min,实现模拟运动,并进行运动学仿真分析,得到如图11所示的栽植器点速度与加速度曲线图。

图9 栽植器G点速度与加速度曲线
由图8b和图6a比较可知,栽机构仿真得到的栽植轨迹与与理论分析优化后的鸭嘴栽植器点运动轨迹几乎一致,轨迹高度相差4 mm,栽植深度相差2 mm,(仿真中的栽植轨迹高度为302 mm,栽植深度为65 mm;优化后的栽植机构点运动轨迹高度为298 mm,栽植深度为63 mm)。由图9和图6b、6c进行比较可知,栽植机构虚拟仿真所得到的速度、加速度曲线与理论分析得到的速度、加速度曲线基本相同,在接苗点(水平位移77 mm)时的速度和加速度值偏差较小,分别为0.03和0.07 m/s(仿真分析速度和加速度值分别为0.32和3.87 m/s;优化后速度和加速度值分别为0.35和3.94 m/s),此时的速度较小,便于平稳接苗,保证钵苗的完整性;在栽苗点(水平位移273 mm)时的速度和加速度值稍有偏差,分别为0.03和0.06 m/s(仿真分析速度和加速度值分别为0.28和3.41 m/s;优化后速度和加速度值分别为0.31和3.47 m/s),此时的速度最小且接近于0,有利于栽植器投苗时,实现“零速投苗”,以保证钵苗的直立度。
综合以上栽植机构的鸭嘴栽植器栽植点点的栽植轨迹、栽植速度以及栽植加速度仿真结果分析,验证了该机构理论分析的正确性。
6 田间试验
为了验证所设计的栽植机构理论设计的正确性,根据以上优化参数加工出具有行星轮系滑道式栽植机构的试验样机,并以钵苗直立度为主要检测指标,于2018年4月17日在河南省孟津县对该试验样机进行了田间试验,试验前对土地进行了耕整,如图10所示。
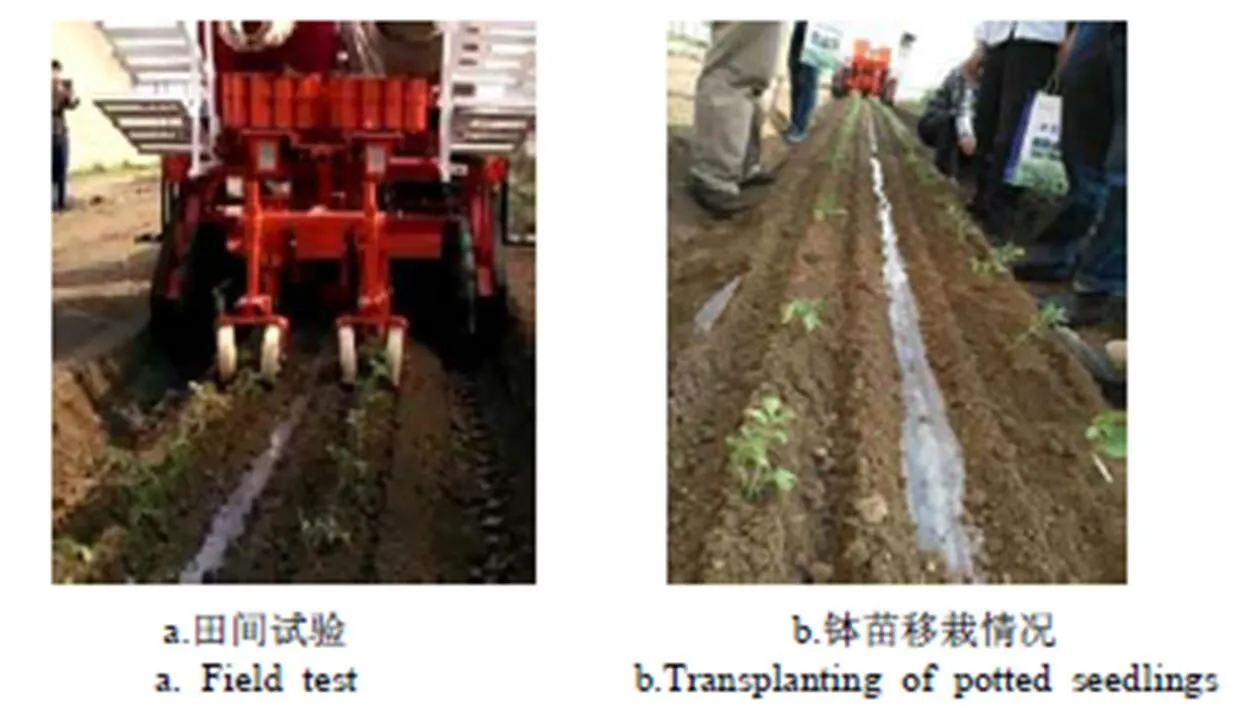
图10 田间试验及钵苗移栽情况
6.1 试验材料与设备
试验材料:试验选取上述文中进行物理特性实验的同一批次的钵苗,钵苗苗龄期为40 d,钵体平均高度为40 mm,钵体上端平均尺寸为28 mm,下端平均尺寸为13 mm,钵苗总高度在120~140 mm之间。
试验设备:东方红300型拖拉机、量程0~100 mm的卷尺、标尺、量角器和计时器。
6.2 试验指标
试验按照相关检测方法和标准[30-31]对样机移栽性能进行测定,并根据农艺要求规定知钵苗栽植直立状态为:钵苗茎秆与地面夹角大于70°为优良,夹角小于45°为不合格,其余为合格。
6.3 试验方法
试验过程中拖拉机拖带机组前进速度为450 mm/s,移栽机栽植频率为74 株/min,进行3组试验,每组栽植50株苗,记录试验样本数据并按照试验指标进行分类统计。
6.4 试验结果
钵苗栽植直立度测试数据统计结果如表2所示。由表中数据可知,在机构最佳参数组合下,机组前进速度= 450 mm/s 时,设计的行星轮系划道式栽植机构能够实现较高直立度的钵苗栽植,栽后钵苗直立度优良率为94%,无缺苗和漏栽现象,能够很好地满足钵苗农艺栽植要求。
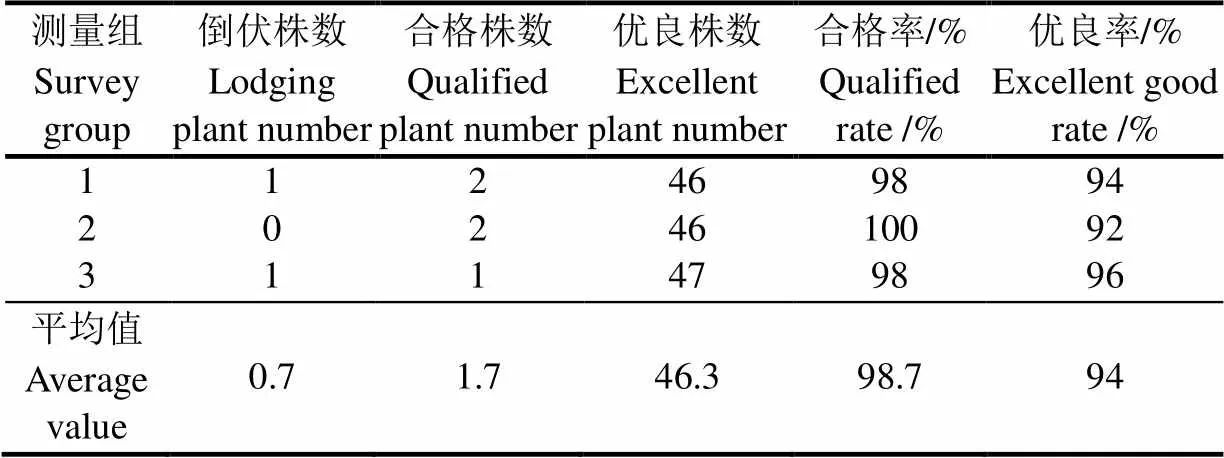
表2 钵苗栽植直立度测量结果
7 结 论
1)本文根据番茄钵苗的物理特性,提出了栽植机构的设计要求,设计了一种行星轮系滑道式栽植机构,并对其结构特点、工作原理栽植器开合原理和作业过程进行了阐述与理论分析。
2)基于建立的栽植机构运动学数学模型,采用Matlab,编写了栽植机构辅助分析优化程序,通过人机交互的方式,对机构的结构参数进行了优选分析,得到了一组满足栽植要求的机构参数组合:0=20 mm、1=15 mm、2=10 mm、1= 100 mm、2= 150 mm、3= 80 mm、4= 140 mm、5= 100 mm、0= 45°、1= 148°、=176°、=108°。
3)利用SoldWorks2014软件对栽植机构进行了结构设计和虚拟装配,并导在ADAMS运动仿真软件中进行了栽植机构的虚拟运动及仿真分析,验证了机构设计的合理性和理论分析的正确性,该机构整个栽植轨迹高度为298 mm,栽植深度为63 mm,移栽株距为365 mm,满足番茄移栽的农艺要求。
4)加工出该栽植机构部件并组装成试验样机,以钵苗直立度为主要检测指标对该样机进行田间试验,结果表明:在机组前进速度为 450 mm/s,栽植频率为74株/min时,钵苗移栽直立度较高,优良率为 94% ,无缺苗和漏栽现象。
[1] 于晓旭,赵匀,陈宝成,等. 移栽机械发展现状与展望[J].农业机械学报,2014,45(8):44-53. Yu Xiaoxu, Zhao Yun, Chen Baocheng, et al. Current situation and prospect of transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 44-53.
[2] 李华,曹卫彬,李树峰,等. 2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机的研制[J]. 农业工程学报,2017,33(15):23--33. Li Hua, Cao Weibin, Li Shufeng, et al. Development of 2ZXM-2 automatic plastic film mulching plug seedling transplanter for vegetable[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(15): 23-33. (in Chinese with English abstract)
[3] 赵匀,朱慧轩,辛亮,等. 拟合齿轮五杆水稻钵苗移栽机构的机理分析与试验[J].农业工程学报,2016,32(1):12-21. Zhao Yun, Zhu Huixuan, Xin Liang, et al. Mechanism analysis and experiment of transplaming mechanism with fitting gear five-bar for rice pot seedling[J]. Transactions of tlle Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2016, 32(1): 12-21. (in Chinese witl English abstract)
[4] 倪有亮,金诚谦,刘基. 全自动移栽机取送苗系统的设计与试验[J]. 农业工程学报,2015,(23):10-19. Ni Youliang, Jin Chengqian, Liu Ji. Design and experiment of system for picking up and delivering seedlings in automatic transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015,(23): 10-19. ( in Chinese with English abstract)
[5] Prasanna K G V. Raheman. Automatic feeding mechanism of a vegetable transplanter[J]. International Journal of Agricultural and Biological Engineering, 2012, 5(2): 20-27.
[6] Ye Bingliang, Yi Weiming, Yu Gaohong, et al. Optimization design and test of rice plug seedling transplanting mechanism of planetary gear train with incomplete eccentric circular gear and non-circular gears[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(6): 43-55.
[7] 王蒙蒙,宋建农,刘彩玲,等. 蔬菜移栽机曲柄摆杆式夹苗机构的设计与试验[J]. 农业工程学报,2015,31(14):49--57. Wang Mengmeng, Song Jiannong, Liu Cailing, et al. Design and experiment of crank rocker type clamp seedlings mechanism of vegetable transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(14): 49-57. (in Chinese witl English abstract)
[8] 李旭英,王玉伟,鲁国成,等. 吊杯式栽植器的优化设计及试验[J]. 农业工程学报,2015,31(14):58-64. Li Xuying, Wang Yuwei, Lu Guocheng, et al. Optimization design and test of Dibble-type transplanting device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(14): 58-64. (in Chinese with English abstract)
[9] 韩霞,陈海涛.番茄链式纸钵苗移栽机栽植机构参数优化试验[J]. 东北农业大学学报,2018,(4):79-86. Han Xia, Chen Haitao. Optimization experiment of transplanting Mechanism parameters of Tomato chain Seedling transplanting Machine [J]. Journal of Northeast Agricultural University, 2018, (4): 79-86.
[10] 王义鹏,王卫兵,张恒,等. 错列链夹式移栽机栽植机构的设计与仿真[J]. 机械设计与制造,2018,(4):68-71. Wang Yipeng, Wang Weibing, Zhang Heng, et al. Design and Simulation of transplanting Mechanism of staggered chain clip transplanter[J]. Mechanical Design and manufacture, 2018, (4): 68-71.
[11] 高芳,李洪昌. 蔬菜机械化生产对秧苗栽植质量的影响研究[J]. 农机化研究,2018,(12):125-129. Gao Fang, Li Hongchang. Study on the effect of vegetable Mechanized production on Seedling planting quality [J]. Research on Agricultural Mechanization, 2018, (12):125-129.
[12] 刘洋,毛罕平,王涛,等. 吊杯式移栽机构中番茄穴盘苗的运动分析优化与试验[J]. 农业机械学报,2018,(05):1-10. Liu Yang, Mao Han-ping, Wang Tao, et al. Motion Analysis Optimization and experiment of Tomato Seedling in the transplanting Mechanism of hanging Cup [J]. Journal of Agricultural Machinery, 2018,(05): 1-10.
[13] 周福君,芦杰,杜佳兴,等. 玉米钵苗移栽机圆盘式栽植机构参数优化及试验[J]. 农业工程学报,2014,(1):18-24. Zhou Fujun, Lu Jie, Du Jiaxing, et al. Parameters optimization and experiment of corn-paper transplanting machine with seedling disk[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2014, 30(1): 18-24. (in Chinese with English abstract)
[14] 陈建能,黄前泽,王英,等.钵苗移栽机非圆齿轮行星轮系栽植机构参数分析及反求[J].农业工程学报,2013,29(8):18-26. Chen Jianneng, Huang Qianze, Wang Ying, et al. Parametric analysis and inversion of transplanting mechanism with planetary non-circular gears for potted-seedling transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(8): 18-26. (in Chinese with English abstract)
[15] 俞高红,廖振飘,徐乐辉,等. 大株距行星轮系蔬菜钵苗栽植机构优化设计与试验[J].农业机械学报,2015,46(7):38-44. Yu Gao hong, Liao Zhenfeng, Xu Lehui, et al. Optimization design and test of large spacing planetary gear train for vegetable pot-seedling planting mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 38-44.
[16] 何亚凯,李树君,杨学军,等. 凸轮摆杆式栽植机构运动分析及性能试验[J]. 农业工程学报,2016,32(6):34-41. He Yakai, Li Shujun, Yang Xuejun, et al. Kinematic analysis and performance experiment of cam—swing link planting mechanism [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(6): 34-41.(in Chinese with English abstract)
[17] 金鑫,杜新武,杨传华,等. 移栽机曲柄滑槽式栽植机构设计与试验[J]. 农业机械学报,2015,46(7):38-44. Jin Xin, Du Xinwu, Yang Chuanhua, et al. Design and Experiment on Crank-chute Planting Mechanism of Transplanting Machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5): 83-90.
[18] 刘姣娣,曹卫彬,田东洋,等.基于苗钵力学特性的自动移栽机执行机构参数优化试验[J].农业工程学报,2016,32(16):32-39. Liu Jiaodi, Cao Weibin, Tian Dongyang, et al. Optimization experiment of transplanting actuator parameters based on mechanical property of seedling pot [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(16): 32-39. (in Chinese with English abstract)
[19] 徐乐辉. 大株距旋转式行星轮系蔬菜钵苗栽植机构的优化设计与试验[D]. 杭州:浙江理工大学,2015. Xu Yuhui. Optimum Design and Experiment of Vegetable Seedling Planting Mechanism with Large Plant Spacing Rotation Planetary Gear Train [D]. Hangzhou: Zhejiang University of Technology, 2015.
[20] 张晨迪. 自走式移栽机行星轮转臂式栽植机构优化设计与试验[D]. 杭州:江苏大学,2017. Zhang Chendi. Optimum Design and Test of Planetary Rotation Arm Plantation Mechanism of Self-moving Transplanter [D]. Hangzhou: Jiangsu University, 2017.
[21] Jin Xin, Pang Jing, Ji Jiangtao, et al. Experiment and simulation analysis on high-speed up-film transplanting mechanism [J]. International Agricultural Engineering Journal, 2017, 26(3): 105-112.
[22] 陈建能,章鹏华,王英,等. 旋转式钵苗栽植机构多目标参数优化与试验[J]. 农业机械学报,2015,46(5):46-53. Chen Jianneng, Zhang Penghua, Wang Ying, et al. Multi-objective parameter optimization and experiment of rotary seedling planting mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(5): 46-53.
[23] 刘姣娣,曹卫彬,田东洋,等. 钵苗有效零速移栽栽植机构运动学分析与试验[J]. 机械工程学报,2017,53(7):76-84. Liu Jiaodi, Cao Weibin, Tian Dongyang, et al. Kinematic analysis and test on transplanting mechanism with effective zero-speed transplanting on mulch Film[J]. Journal of mechanical engineering, 2017, 53(7): 76-84.
[24] 赵匀. 农业机械分析与综合[M]. 北京:机械工业出版社, 2008.
[25] 刘浩,韩晶.MATLAB R2012a完全自学一本通[M].北京:电子工业出版社,2013.
[26] 陈杰.MATLAB宝典[M].北京:电子工业出版社,2013.
[27] 崔巍,赵亮,宋建农,等. 吊杯式移栽机栽植器运动学分析与试验[J]. 农业机械学报,2012,43(S1):35-38,34. Cui Wei, Zhao Liang, Song Jiannong, et al. Kinematic analysis and experiment of dibble-type planting devices [J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(S1): 35-38, 34.
[28] Jin Xin, Ji Jiangtao, Huang Zizhai, et al. Seedling pick-up mechanism of five-bar combined with ordinary gear train [J]. International Agricultural Engineering Journal, 2017, 26(2): 151-158.
[29] 朱鹏飞,周洪,徐佳.不同施肥方案和栽植密度在番茄上的应用效果[J].长江蔬菜,2018,(2):77-78.
[30] 封俊,顾世康,曾爱军,等.导苗管式栽植机的试验研究(Ⅱ)栽植机的性能评价指标与检测方法[J].农业工程学报,1998’,14(2):73-77. Feng Jun,Gu Shikang,Zeng Aijun,et a1.Study on transplanter with chute and seedling aid springs(PartⅡ)Judging-targets system for transplanters [J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),1998,14(2):73-77.(in Chinese with English abstract)
[31] 旱地栽植机械:JB/T 10291—2013[S].北京:机械工业出版社,2014.
Design and parameter optimization of planetary gear- train slip type pot seedling planting mechanism
Ji Jiangtao1,2, Yang Linhui1, Jin Xin1,2※, Gao Song1, Pang Jing1, Wang Jinglin1
(1,,471003,; 2,471003,)
The perpendicularity is an important index for evaluating the quality of pot seedling transplanting. At present, the planting mechanism easily resulted in lower tilt and lower perpendicularity of seedling, which leads to lower survival rate of the seedling in the bowl. In order to solve this problem, according to the agronomic requirements of pot seedling planting and based on the physical characteristics of pot seedling, the design requirements of planting mechanism were put forward in this paper, and a planetary gear-train slid way planting mechanism was designed. Through the cooperation of the planetary gear train and the slide track, the pot seedling planting in the bowl was accomplished by the way of shooting seeding, and the operation process of the mechanism was analyzed, and the kinematics model of the mechanism was established. Based on MATLAB, the optimization software of auxiliary analysis of planting mechanism was compiled, and the planting track and structural parameters of the mechanism were optimized, and a group of optimal structural parameters that meet the requirements of seedling planting was obtained, that means, the radius of solar wheel0= 20 mm, the radius of middle wheel1= 15 mm, the radius of planetary wheel2=10 mm, the length of connecting rod()1= 100 mm, the length of rodon planting arm2= 150 mm, the length of rodon planting arm3= 80 mm, the length of duck bill planter()4= 140 mm, the distance from pointto origin of coordinateon a slide5= 100 mm, the angle of initial installation of planetary frame()0= 45°, the angle between connecting rodandaxis1= 45°, the angle between rodand rodof planting arm=176°, and the angle between slideandaxis=108°. In this combination, the structure design and 3D virtual assembly of the planting mechanism were completed, and the virtual movement and simulation analysis of the mechanism were carried out in ADAMS, and the rationality and accuracy of the mechanism design were verified. According to the optimized parameters, the physical prototype was produced, and the field experiment was carried out with the vertical degree of the bowl seedling as the main test index. The field test results showed that when the speed of the planter was 450 mm per second and the planting frequency was 74 plants per minute, the transplanting perpendicularity was high, and the qualified rate was 94%, which meets the requirements of planting performance. The results can provide references for designing planting mechanism of potted seedling transplanting machine.
agricultural machinery; optimization; experiments; planetary gear-train slide; planting mechanism; simulation analysis
10.11975/j.issn.1002-6819.2018.18.011
S223.99
A
1002-6819(2018)-18-0083-10
2018-05-09
2018-07-22
“十三五”国家重点研发计划项目(2016YFD0700103)、河南省高校科技创新人才计划(19HASTIT021)、河南省科技创新杰出人才项目(184200510017)
姬江涛,男,教授,博士生导师,主要从事蔬菜智能化生产关键技术装备研发,Email:jjt0907@163.com
金 鑫,男,副教授,博士,主要从事种苗高速栽插装备与农机状态检测技术研究,Email:jx.771@163.com
姬江涛,杨林辉,金 鑫,高 颂,庞 靖,王景林. 行星轮系滑道式钵苗栽植机构设计与参数优化[J]. 农业工程学报,2018,34(18):83-92. doi:10.11975/j.issn.1002-6819.2018.18.011 http://www.tcsae.org
Ji Jiangtao, Yang Linhui, Jin Xin, Gao Song, Pang Jing, Wang Jinglin. Design and parameter optimization of planetary gear-train slip type pot seedling planting mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 83-92. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.18.011 http://www.tcsae.org
