面向协同、互联和智能出行:V2X的挑战和经验
2018-10-10
主题词:协同智能交通系统C-ITS V2X V2IV2V通讯 自动驾驶系统 协同 互联和自动驾驶 物联网 IoT 网络安全
1 INTRODUCTION
In late 2016,the European Commission released its strategy for the introduction and roll out of Cooperative,Connected and Automated Mobility(CCAM)[1].This strategy presents a vision of seamless combination of all types transportation modalities(bicycles,cars,buses,boats,airplanes,etc.)to provide end to end mobility opportunities to its users.
A key element in this vision is Cooperative and Connected Automated Driving(CCAD),which incorporates a broad range of road transport modalities(passenger cars,truck platoons,etc.)at different levels of automation ranging from SAE Level 2 to Level 4.CCAD could be considered to be the third generation of Intelligent Transportation Systems(ITSs).The first generation was introduced over 20 years ago and was composed of connected vehicles together with roadside sensors,communication infrastructure and associated services.Their original aim was to provide drivers with additional traffic safety information that would allow them to drive more safely.The second-generation ITS systems added technology that allowed vehicles to access isolated services via cellular networks to,for instance,retrieve over-the-air updates of map information for a route planner or to receive real-time traffic information[2].
This short range direct communication between vehicles and the road infrastructure is called Cooperative Intelligent Transport Systems(C-ITS).C-ITS allow road users and traffic management systems to share information and coordinate traffic behavior to improve traffic flows,driving comfort and,ultimately,increase road safety[3].
CCAD builds on the C-ITS capabilities to allow cooperative information to be used directly by vehicles equipped with automated functions.Since C-ITS were originally conceived as driver-centric systems(instead of vehicle-centric ones),the implementation of CCAD created new challenges.Among others,these include[1]:
●Development of technical and regulatory solutions that are supported by a wide variety of European Member States and stake holders.
●Development of solutions that incorporate social and commercial aspects such as environmental impact,systems costs,weather effects,safety issues,mobility,etc.
●Policy challenges associated with the introduction and deployment of CCAD technologies.This includes“…the establishment of security features to enable trustworthy yet anonymous transmission of safety-critical messages”[4].
●Bridging the technological gap between research prototypes and commercial/industrial of vehicle and infrastructure technologies.
●The scaling of prototypes to nation-wide systems.
The rest of this document will summarize recent experience in addressing the last two challenges,with an emphasis on vehicle communication technology.
Specifically,Section 2 provides an overview on Infrastructure-to-Vehicle(I2V)and Vehicle-to-Everything(V2X)communication technology and its uses.This is followed,in Section 3 by a summary of recent project experiences with V2X technology in the context of automated driving.Finally,Section 4 presents our conclusions.
2 I2V and V2X COMMUNICATION
The early C-ITS services had a focus on informative services in mainly a highway setting.For instance,I2V communications was used for road hazard and road works warnings and are so-called day-1 services[5].In the past few years,these services were extended to urban deployments with cooperative intersections providing traffic light information,enabling‘Green Wave’-like applications and/or priority services to emergency vehicles.More advanced applications include vulnerable road users(VRUs)protection services.
Direct vehicle-to-vehicle(V2V)communication allowed short following distance between vehicles using cooperative adaptive cruise control and enabled so-called day-2 services like Cooperative-Automated Emergency Brake(CAEB)applications[6],[7].The CAEB application can also be used at cooperative intersections for VRU protection services or to extend the perception range of vehicles around corners or under blocked-view conditions.This is referred to as V2X communication and it is used to exchange standardized messages with so-called cooperative awareness information(where am I,what am I,what do I hear)and environmental information,which is needed for real-time traffic safety applications.
The wireless technology that allows V2X communication is called ITS-G5,formerly known as 802.11p or,sometimes,802.11 OCB mode(OCB stands for Outside the Context of a Basic service set).ITS-G5 is a simplified version of the well-known 802.11 Wi-Fi communication standard.It is an ad-hoc communication mode that does not require infrastructure(access points)and that is optimized for rapidly varying communication environments,providing low latency and short connection set-ups.
2.1 Cellular-V2X
In this section a short overview of current V2X developments in the global cellular standards by 3GPP[8](3rdGeneration Partnerships Project)on 4G/LTE is given.This together with activities on next generation 5G technology which are related to Automated Driving.
Cellular-V2X[9](C-V2X)is defined as LTE V2X in 3GPP Release 14.It is designed to support different modes of communication:
-Device-to-device:this is V2V,V2I(Vehicle-to-Infrastructure),V2P(Vehicle-to-Pedestrian)direct communication which can operate without network infrastructure.
-Device-to-cell tower:utilizing existing infrastructure for network scheduling enabling V2I end-toend solutions.
-Device-to-network:V2N(Vehicle-to-Network)solution for cloud services,comparable to existing cellular links which includes a mobile network operator.C-V2X must provide real-time,highly reliable information exchange to support mobility and safety application.At this time the technology is still in trial phase with several interoperability tests ongoing[10].Commercial deployment by MNOs is expected in the near future.This also applies to the deployment of commercial chipset needed for C-V2X,which should become available in 2018.
2.2 5G Cellular-V2X
5G technologies are the next generation of cellular networks.With every generation larger amounts of data can be transmitted,at faster speeds,lower latencies and more reliability.It is expected that by using 5G technologies,CV2X will be capable to meet more demanding safety requirements.The higher throughput,lower latency and enhanced reliability should allow real-time data to support automated driving.
The 5G Infrastructure Public Private Partnership(5GPPP)[11],a joint initiative between the EC and European ICT industry,has launched several projects to deliver solutions,architectures,technologies and standards for the next generation of 5G communication infrastructures.To ease the digital transformation,a number of 5G vertical sectors were introduced:Media,Energy,Smart Cities,etc.Automotive is another vertical sector with concepts for connected cars and autonomous and secure vehicles.
Within 5G-PPP a number of cross-project work groups exist,including the 5G Automotive Work Group which focus on connected and automated mobility,with the aim of providing a common platform between the projects that develop V2X concepts.One of those projects is 5GCAR[12].It started in 2017 with the objective of developing an overall 5G system architecture for highly reliable and lowlatency V2X services,including security and privacy support.
The 5G Automotive Association(5GAA)[13]was created in 2016,to globally connect the telecom industry and automotive companies to develop end-to-end solutions for future mobility and transportation services.Several Working Groups develop frameworks,standards and business cases for 5G.5GAA promotes 5G as platform to enable C-ITS,V2X and connected mobility services in general.
To summarize,a lot of activities on C-V2X are currently ongoing and the technology holds a good promise for integration with current and future CCAM deployments.
3 CASE STUDIES
Several of the technological and adoption challenges outlined in Section 1 are currently being address by European-wide projects.TNO participates in several of such projects,including the four summarized next:
●AUTOPILOT:It explorers the incorporating of Internet of Things(IoT)as enabler for automated driving
●ENSEMBLE:It addresses the obstacles of adaptation and interoperability of multi-brand truck platooning towards real-life deployment
●SECREDAS:It demonstrates an integrated approach to cyber-security for cooperative and connected vehicles.
●CARTRE:It provides support to develop regulatory policies that permit the introduction of CCAD at the EU level in a coherent way.
3.1 AUTOPILOT-Internet of Things for Automated Driving
IoT is often envisioned as a network of physical objects,devices,vehicles,buildings and other items,embedded with electronics,software,sensors,and network connectivity that allows these objects to collect and exchange data.The promise of IoT is that the integration of the physical world into computer-based systems will significantly improve the control of(e.g.industrial) processes in terms of accuracy and efficiency.This is clearly in display in the AUTOPILOT project[14],where a cross-domain implementation is used with an IoT platform where all IoT data is collected and different domain type applications can use the cross-domain data to enable different services.The IoT platform relies on a heterogeneous communication network whose primary design feature is to maintain connectivity between component without regard of how that connectivity is achieved.The AUTOPILOT IoT ecosystem and its main elements are depicted in Figure 1.
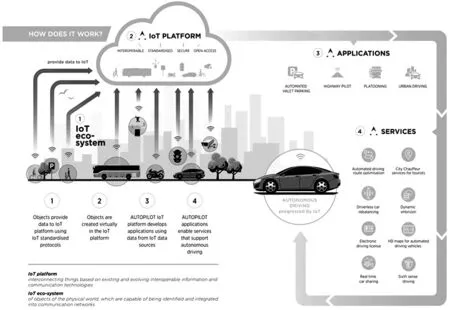
Figure 1.AUTOPILOT IoT ecosystem,platform,applications and services.
TNO leads the AUTOPILOT Brainport Pilot Site and focus on the locally deployed automated driving use cases:Highway pilot,Automated Valet Parking and Platooning.The automated driving services are:autonomous driving route optimization,real-time car sharing,driverless car rebalancing,and high-definition maps for automated driving vehicles.
Intermediate project results have shown that to successfully use IoT information,it needs to be accompanied with metadata about its trust levels,accuracy,timestamps,etc.As is the case with any other external in-vehicle information source,the metadata makes it possible to successfully fuse IoT information at the vehicle level with the vehicle’s own sensor-based information.
Data from external sources can be used to enhance the vehicle's‘world model’,which it turn is used in decision making,typically at the strategic level(time scale of minutes).A good example of this kind of decision making is route planning.In AUTOPILOT,IoT data is also used at the tactical decision level(time scale of seconds to subminutes):traffic light information is used for platoon formation and platoon intersection crossings.Finally,it is important to remark that IoT data is not used at the operational decision level(time scales of sub-seconds)for real-time vehicle control,because current IoT platforms and standards have no real-time support and/or Quality of Service(QoS)mechanisms in place to reach the trustworthiness levels needed for automated driving.Future developments on communication technology for IoT and on the IoT standard itself may remove these limitations.
The IoT information exchange in AUTOPILOT is based on data models.To scale up deployments the data models need to be agreed upon for the different autonomous driving use cases.This is also needed across the different AUTOPILOT Pilot Sites,to have interoperable deployment of these use cases.Overall for the IoT data models,the specifications needs to focus on interoperability,for specific use cases but also align across multiple use cases,as some services can relate to multiple use cases.And the design of the IoT data models should be specified with a focus on supporting the specific needs of CCAD functions.
3.2 ENSEMBLE–Heterogeneous multi-brand truck platooning
ENSEMBLE is a newly launched European project(May 2018[15])coordinated by TNO.It will lay the foundation for multi-brand truck platooning across Europe,by speeding up the implementation of multi-brand platooning,bringing its real-world deployment within reach.Its final outcome will be a demonstration of a sixtrucks platoon,each one of a different brand,driving in real-world traffic conditions across national borders in 2021.
To allow the transition from single-brand to multibrand platooning,platoon operation levels need to be defined to harmonize the design of different platooning functionalities and strategies,reflecting the full diversity of trucks with platooning functionality.Platoons will appear in normal traffic,causing smoother traffic and higher vehicle density and thus improving road throughput.Thanks to cooperative automated dynamic control between the trucks,truck operations will be safer and less stressful.At highway entries,exits and junctions,platoons will automatically increase vehicle gaps to give way to other road users.
Interoperability is a leading design principle.Existing standardized C-ITS message sets will be used to coordinate the trucks,and new message sets will be developed.On top of a truck-specific operational layer(responsible for vehicle control),a generic tactical layer will defined and implemented for platoon coordination(see Figure 2).The platoon coordinator will use the new messages to support the interactions needed for platoon maneuvering and to share platooning awareness among the platoon members.Existing C-ITS security will be used to secure communications and an new security framework will be developed for future proof secure-platooning.

Figure 2.ENSEMBLE Platooning layered approach.
The layered ENSEMBLE platooning design includes V2X communication based on multiple communication technologies.The Strategic layer will enable future deployments to generically connect new and existing services,while the Service layer will allow for fleet monitoring systems,route planning and logistics systems,creating a fully integrated platooning solution.
3.3 SECREDAS–Cyber security for crossdomain reliable automated systems
SECREDAS is another recently-launched,European ECSEL project(May 2018[16])that focuses on cybersecurity and safety related technologies in for automated systems,including automated driving.For passenger vehicles,SECREDAS aims to provide methods to harden wireless communication attack vectors such as radio data systems,Bluetooth communication,smart key receivers,and in-car Wi-Fi,among others.
To achieve this goal,the project will develop a multidomain security,privacy and safety reference architecture,along with multiple common technology elements including ITS-G5 and 5G communication,central gateways,communication channels,generic sensing elements,block chain,crypto functions,trusted anchors/zero trust architecture elements,and anomaly detection and mitigation elements.The project will also develop and validate a high-security RADAR 5G inter-vehicle communication solution and new security and privacy protections for V2X and IoT communication.
The project results will be displayed in a real-life demonstrator of a secured automated driving vehicle performing over-the-air software updates through a trusted V2X connection.
3.4 CARTRE-Coordination of Automated Road Transport Deployment for Europe
CARTRE[17]is a European Coordination and Support Action that aims to accelerate development and deployment of automated road transport by increasing market and policy certainties.CARTRE collaborates with industry players,ensuring that automated road transport systems and services are compatible at European level and are deployed in a coherent way.A platform will be set up,for sharing and re-using data and experiences from different automated road transport systems to actively support field operational tests and pilots carried out at national and European level.And to work on future visions,potential impacts and research gaps in the deployment of automated road transport.
Several thematic areas were defined for Connected and Automated Driving(CAD):in-vehicle technology enablers;digital and physical infrastructure;big data,artificial intelligence and their applications;new shared and automated mobility services;and connectivity.Additional thematic areas are on human factors;policy and regulatory needs,European harmonization;safety validation and roadworthiness testing;user awareness,societal acceptance and ethics;and socio-economic assessment and sustainability.
Some challenges identified for connectivity for CAD are[18]:
上述基于砂粒含量和砂质黄土相关方面的研究虽然已经取得了一定的研究成果,但要想得出合理的且能够直接服务于工程防灾的砂质黄土力学特性规律[16-18],还需做更为详细的试验和计算工作。目前,砂质黄土地区主要分布于榆林、延安西北部地区及甘肃庆阳地区,因砂质黄土的不良工程地质特性而引发的滑塌地质灾害非常普遍。因此,研究砂粒含量对砂质黄土力学性质的影响,就显得尤为迫切,而且具有重要的工程实际意义。
-Determining whether CAD vehicles should rely mostly on their own sensors to make safety critical decision(as opposed to on external sources).
-Determining whether V2V data could be considered as another internal sensor data source and,if so,how to link V2X communications to safety critical elements of the system,such as decision making.
-Determining how to ensure the safety of all road users,including VRUs,in CAD applications.
And it is concluded that V2X connectivity in its various forms will act as an additional enabler for automated vehicles,that technology neutrality is essential and future 5G technology working jointly with ITS-G5 and C-V2X standards.
4 Conclusions
Based on recent project experience,the following challenges have been identified in the transition from current informative cooperative driver services towards future CCAD:
●The current C-ITS standards are not designed for automated driving.Also,current cooperative services are of an informative nature,so they should be upgraded to support the safety-critical functions in CCAD.This implies that future V2X protocols and communication technologies should be taken into account during the safety-critical analysis phase of new design of autonomous driving applications and products.That is,the safety analysis of future CCAD applications should be done not only at the vehicle level but also at the systems level.
●New interoperable message sets needs to be developed to share intention,sensor and maneuvering data to enable CCAD applications and to scale-up its deployment.
●New interoperable message sets needs to be developed to share intention,sensor and maneuvering data to enable CCAD applications and to scale-up its deployment.
●IoT technology may already solve issues on data privacy,cyber security,service discovery and connectivity.However,this technology was not designed specifically for CCAD,so it is lacking real-time support,QoS support,and guaranteed trustworthiness of its data.Thus current IoT data might be used to extend situational awareness and to support strategic decision making.However,it cannot be used for safety-critical decision making.
●V2X communications are an enabler for CCAD.Connectivity solutions needs to be technology neutral and could be developed in a joint framework of C-ITS and CV2X standards.
ACKNOWLEDGEMENT
The authors graciously acknowledge the support of the CARTRE project in writing this article.
NOMENCLATURE
5GAA 5G Automotive Association
5G-PPP 5G Public Private Partnership
CAD Connected and Automated Driving
CAEB Cooperative Automated Emergency Brake
CCAD Coop.&Connected Automated Driving
CCAM Coop.&Connected Automated Mobility
C-ITS Cooperative ITS
C-V2X Cellular V2X
I2V Infrastructure to Vehicle
IoT Internet of Things
ITS Intelligent Transportation System
OCB Outside Context of Basic service set
QoS Quality of Service
V2I Vehicle to Infrastructure
V2N Vehicle to Network
V2P Vehicle to Pedestrian
V2X Vehicle to Everything
V2V Vehicle to Vehicle
VRU Vulnerable Road User