欧洲互联智能汽车关键技术综述—12thITS EUROPEAN CONGRESS总结
2018-10-10
1 前言
在物联网(IoT)发展的大背景下,智能交通是各国智慧城市发展中的重要发展战略。2017年在法国斯特拉斯堡举行的12届欧洲智能交通大会上,各国专家讨论了互联网和物联网下信息和通讯技术(ICT)、汽车互联化与汽车自动化、汽车智能化的关键技术、数据安全与数据隐私,讨论了随着数字化和互联化的发展,互联智能汽车面临的挑战,提出了应对挑战的技术措施。
2 互联智能汽车测试能力整合
当前互联智能驾驶(Connected and Automated Driving,CAD)技术发展面临着法律、互联技术、测试与认证技术、传感器和感知技术、功能与控制、道路和基础设施适应和人机界面技术(HMI)发展的挑战。
关于测试技术,普遍采用V字型流程,即从顾客需求开始到最后的用户验收试验,其中要不断进行验证和确认的迭代过程(图1)。
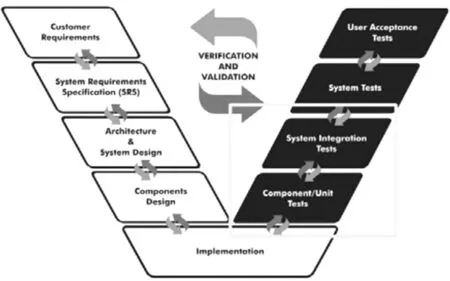
图1 V字型验证与认证流程[1]
欧盟互联智能汽车的测试采用的是合作制,形成了试验、示范基地联盟,其中欧盟试验基地(DRIVE 2X)包括,法兰克福基地Sim TD,Autobrennero,Sisco⁃ga,SCORE-F,Helmond的System TS,Gothenburg的Test Site Sweden,Coop TS Finland。
COMPASS 4D联盟包括在英国的Newcastle、瑞典的Copenhagen、荷兰的Helmond、法国的 Bordeaux、Vi⁃go、意大利的Verona和Thessaloniki七大城市,Com⁃pass4D通过在七个欧洲城市实施和试行三项合作ITS(C-ITS)服务,实现公路运输的道路安全和能源效率。
欧盟支持的CO-GISTICS联盟进行车联网交通效率、燃油经济性改善方面的示范运行,主要在物流中心进行示范项目,这些物流中心包括Frankfurt、Bordeaux、Vigo、Thessaloniki、Arad、Trieste和 Bilbao物流中心。
此外欧盟还支持SCOOP项目和C-ROADS项目,其中SCOOP是一个合作ITS试点部署项目,旨在将大约3000辆车与2000 km的道路连接起来。它由5个不同类型的道路组成:Ile-de-France、巴黎和...之间的“East Corridor”。而通过C-Roads平台,政府和道路运营商联合起来协调整个欧洲的合作智能交通系统(CITS)的部署活动,目标是为道路使用者实现可互操作的跨境C-ITS服务的部署。
L3Pilot项目是由欧盟理事会支持的汽车研发Ho⁃rizon 2020项目支持的项目,该项目聚焦大规模SAE Level 3自动驾驶功能测试,并额外测试一部分Level 4的功能。目前该项目有1000多个测试驾驶员,100辆车分布在11个欧盟国家,测试智能驾驶技术在安全和高效交通方面的可行性。
AutoPilot联合项目:在西班牙的Vigo进行城市驾驶、自动代客泊车测试,在法国的Versailles,进行自动代客泊车、城市驾驶和编队行驶,在荷兰的Brainport进行自动代客泊车测试,高速路自动驾驶和编队测试,在芬兰的Tampere进行自动代客泊车和城市自动驾驶,在韩国进行城市驾驶,在意大利的Livorno进行城市驾驶和高速路自动驾驶。
Drive Me项目,在瑞典Gothenburg公共道路上100个正常家庭将体验Volvo XC90s自动驾驶。该项目是2013年启动的,2017年开始示范实施,在英国伦敦和中国北京也将实施类似的项目。
由CTAG管理的SISCOGA智能走廊与DGT和城市区域合作,与Vigo合作,在城市道路上集成了100多公里。这个在欧洲开创的永久性走廊的目标是对汽车到汽车和汽车到基础设施的通信系统进行运行测试。
CONCORDA EATA项目,该项目第1阶段(2017-2021):
●使用案例主要聚焦提供服务,包括高速路代驾(L2/L3)和密集的卡车编队行驶。
●在技术方面主要是:
·预开发:混合通讯:LTE,ITS G5+LTE V,移动边缘计算应用
网络切片;
LTE广播:GNSS偏移,有害信息和高清地图更新
·研究项目:商用模式、责任、安全概念、服务质量、安全和数据保护法规和标准
●在德国、法国、荷兰、西班牙和比利时20.4Km的测试车道。
CONCORDA EATA项目,该项目第2阶段(2018-2022):
使用案例在第1步的基础上加入代客泊车,在技术应用方面全面应用第1阶段的成果,形成跨境的公路网。
CONCORDA EATA项目,该项目第3阶段(2019初-2023):
使用案例增加智能驾驶,开发的成熟技术开始进行工业化,在授权的路网上进行商业化的智能驾驶。
SISCOGA智能走廊的主要技术参数:
●ITS智能走廊130 Km;
●ITS G5:80 RSUs(路边单元);
●Cellular:3G/4G和LTE/V2X,5G;
●与葡头牙的ITS智能走廊互联。
SISCOGA还建立了合作FOT和示范项目,2010-2011年进行了C2ECOM研发,2011-2012进行了实际道路试验研究项目(FOT)、2012-2013年进行DRIVEC2X FOT,2013-2015年完成了COMPASS4D示范项目,2016-2017年完成了Project SCOOP智能走廊的部署工作。
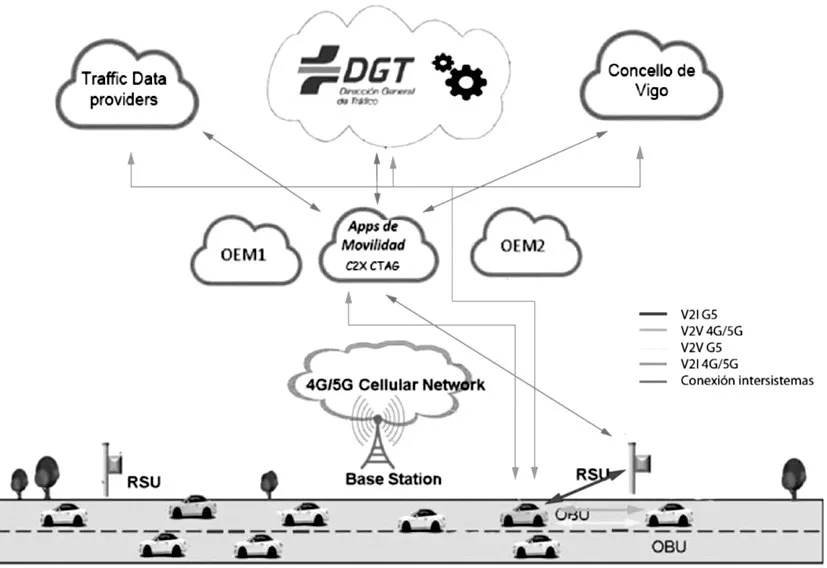
图2 SISCOGA测试项目的混合通讯构架[1]
SISCOGA测试项目的混合通讯构架见图2,主要由DGT云、Concello de Vigo云、交通数据提供商的云、OEM云和作为基站的4G/5G蜂窝网络组成,路边单元为RSU,车载单元为OBU组成了车联网,其中Apps de Movilidad作为核心与RSU、DGT和交通数据提供商云和Concello de Vigo云保持数据交换。
试验样车认证
试验样车的申请人必须提供符合要求系统认证证书(由一系列的技术要求组成)。授权的认证程序是快速和灵活的,并且这种认证在不同的欧盟成员国是互认的,未来的认证将实施软件认证。
3 互联技术促进智能汽车发展
欧盟支持成立了EATA通讯联盟,主要目标[2]:
●促进欧盟互联智能驾驶技术的发展;
●清除发展道路上潜在的障碍,聚焦急需的技术和法规措施;
●识别促进互联和智能驾驶技术的商用模式;
●使欧盟在互联智能驾驶技术领域在全球处于领先地位;
●在汽车行业和通讯行业之间搭建一个知识共享的平台,开发“共同的语音”;
●改善道路安全和提升交通效率,造福社会;
●促进欧盟的数字化经济。
EATA互联智能汽车关注L3,L4的高速路代驾,高密度的卡车编队和自动待客泊车三项工作。
Luc JANSSEUNE提出了智能驾驶的新挑战:车载传感器和互联数据[2]。
●作为额外的车辆传感器互联数据:
●新的信息并且赋予新的属性;
●安全相关的应用需要通过混合通讯的通道进行监管;
●在数据框架上采用安全规则;
●更精、确更安全的定位:校正GNSS
Concorda系统介绍(图3)
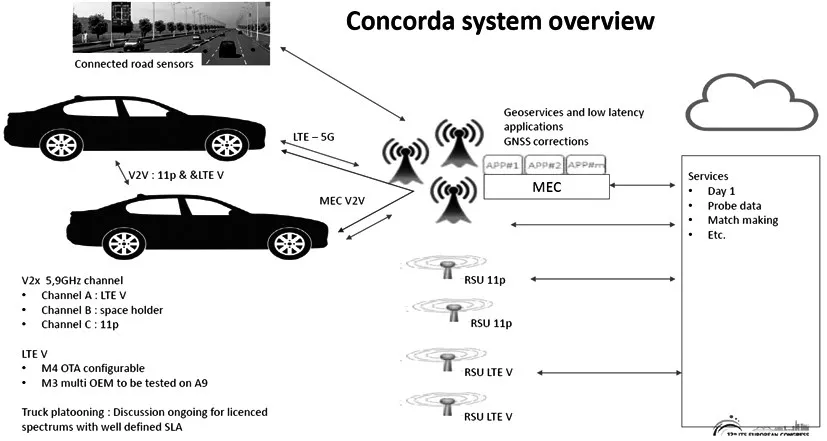
图3 Concorda系统图[2]
GNSS校正因素广播
目标[2]:增加GNSS定位精确性
●卫星状态空间代表;
●广播范围20-70 Km;
●广播频率=1 sec
●包括MNO范围
移动边缘计算(MEC)作为协同接受消息(CAM)和非中心化环境通知信息(DENM)备用
提高短程通信可靠性/可用性的措施[2]:
●消息重复:(已经到位)
●冗余通信路径:
●例如2个95%的可用性总共为99.75%
●LTE站天线位置高,因此可以更好地到达。
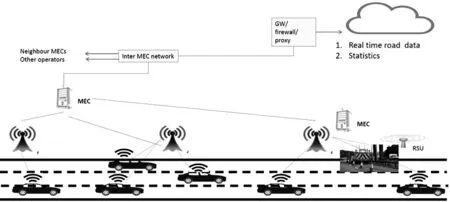
图4 MEC系统构架[2]
代客泊车(AVP)方案[2]
●与基础设施的冗余通信:
●冗余技术:
●基础设施将连接到互联网,通过AVP由汽车通过LTE备份通过短距离通信和嵌入式用户权限管理进行控制(见图5)

图5 AVP与代客泊车管理[2]
通讯片段:
●NB用于汽车唤醒和电池驱动的停车传感器
●uRLLC用于MEC应用和远程驾驶
MAP和精准定位:
●高精3D相对位置地图优化
●GNSS校正位置
●基于停车传感器的精准定位
泊车通讯:
●通过datex II
代客泊车(Automated Valet Parking-AVP)实时模型见图6,服务内容如下:
●车辆Check in/out;
●通过智能手机APP与用户界面;
●给进入的车辆发生3D高精停车地图;
●整合数据:基于群体的停车场检测(使用汽车传感器),登记离开汽车,历史模式,P-slot传感器和相机;
●属性放置并将路径发送到属性位置;
●管理额外的服务:洗车、加油、in-car-delivery,EV充电等;
●通过无线连接管理停车场访问权限,并通过汽车中的令牌作为离线备份来管理;
●交通管理:例如缓冲区的自动驾驶汽车优先考虑手动汽车行驶;
●事故管理+安全(避撞,如行人避撞)。

图6 AVP实时模型[2]
4 智能驾驶车载核心技术
德国博世公司描绘了3个智能驾驶场景,即高速路自动驾驶(2020年)、自动泊车(2018)和城市自动驾驶(2020以后)。
作为颠覆式技术的全球智能驾驶技术的经历着快速的演变,目前驾驶辅助技术系统已经成熟,已经匹配了批量生产产品,大规模、安全和低成本的技术增长促进自动驾驶成为可能,同时又不失驾驶乐趣。随着机电一体化技术的发展,智能驾驶技术会在内燃机和电驱动共存的基础上快速发展,这得益于不断改进的先进汽车电子技术和大批量应用。
互联技术、移动出行、移动数据、加速性、可获得性、可维修性和互操作性等是共享汽车商业发展的独特卖点,而IT和软件是其核心竞争力,未来电驱动和高端CE和模块化是智能共享汽车(SAEC)的动力总成和电子发展的竞争焦点。
Dr.Eckard Steiger提出智能驾驶的核心活动和核心技术包括感知、思考和行动。AI车载计算机的概念见图7,博世公司与NVIDIA公司合作,采用了NVIDIA公司的Xavier技术,打造了车载计算机,结合车载传感器的大量环境数据和云数据和占用网格,汽车变得越来越聪明。通过AI深度学习,汽车可以检测了解周围环境、可以按感知绘制局部地图,可以规划沿着绘制的路径驾驶、可以根据当前车辆驾驶状态优化驾驶动态特性。
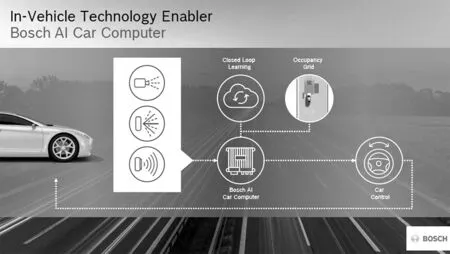
图7 车载计算机[3]
智能驾驶的另一核心技术是精准定位,博世公司提出了博世道路签名云的精准地图概念(图8)。博世道路签名系统与高精地图集成,通过OEM云、地图合作伙伴云、博世道路签名云,视频道路签名数据与雷达道路签名数据共同在博世道路签名云进行匹配来进行精准定位。
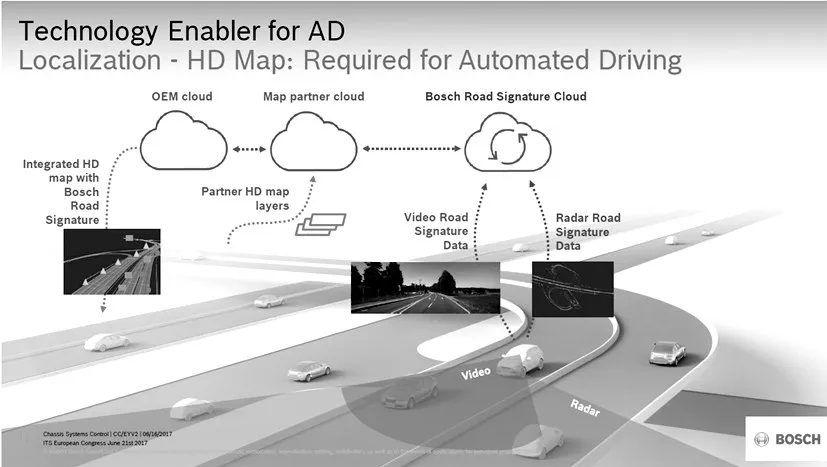
图8 道路签名系统与精准定位[3]
互联技术认证
博世公司提出了汽车互联技术认证流程,包括事件触发、记录事件、上传事件、在Bosch IoT云数据库上汇总雷达、视频数据,然后进行数据分析,Bosch IoT云由数据分析人员、车队管理人员和基础设施开发人员管理。通过使用事件触发数据记录降低数据复杂性,由于即时数据分析而导致的开发迭代时间很短(图9)。
Francisco Sanchez在12届欧洲智能交通大会上介绍了SISCOGA 4CAD未来实施计划、Autopilot、CMOBILE、C-ROADS项目(西班牙)[4]。
Project SCOOP:2016.1-2018年
功能:选择Day 1协同服务;
车队:10台互联智能汽车;
地点:SISCOGA4CAD城间和葡头牙智能走廊
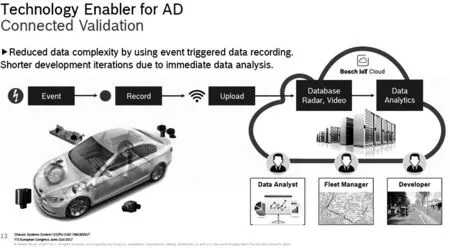
图9 互联汽车认证[3]
Autopilot:2017.7-2020.6
功能:自动代客泊车;
城市自动驾驶;
车队:4台智能驾驶车辆
地点:Vigo市
C-MOBILE项目2017.6–2020.11
功能:
●提升交通效率(绿色优先权、GLOSA,动态限速、尝试车辆数据)
●基础设施到车辆安全(RWW、RHW、EVW、违反信号警告、行人警告系统)
●车与车安全(城市ACC、紧急制动灯、SVW、VRUs警告)
车队:20台卡车、10台公交车、30辆轿车、10辆紧急车辆和10台摩托车
地点:Vigo城市与城间
C-ROADS项目(西班牙):2017.7-2020.6
功能:Day 1,Day 1.5协同服务;
●城市自动驾驶;
●自动代客停车;
●高速路代客驾驶;
●最后一英里自动驾驶接驳客车服务。
车队:30台私人车辆,15台出租车,30台公交车,5台紧急车辆,5台自动驾驶车辆
地点:葡头牙智能走廊
卓越的系统专业知识-应对自动驾驶挑战的关键
信息与通讯技术(ICT)在实现移动互联网中扮演重要角色,见图10。
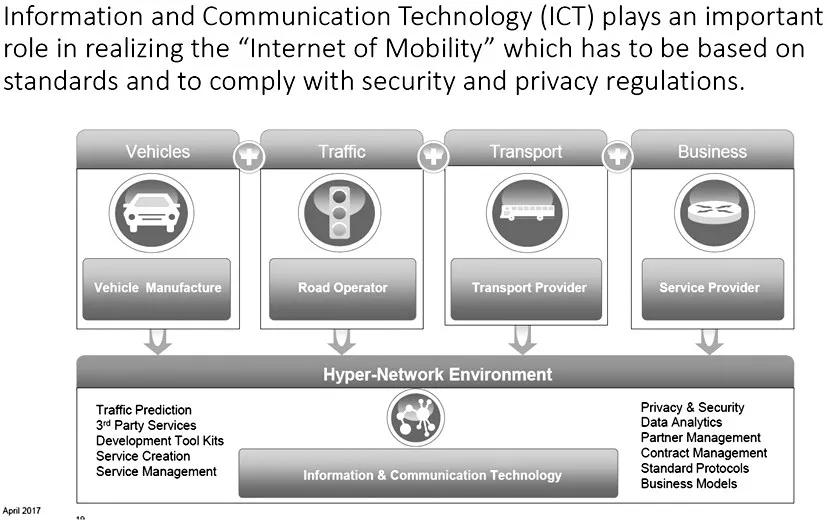
图10 信息与通讯技术(ICT)框架[5]
5 结束语
当前互联智能驾驶(Connected and Automated Driving,CAD)技术发展需要测试与认证技术整合,包括传感器和感知技术、功能与控制、道路和基础设施适应和人机界面技术(HMI)发展。
通讯技术公司与主机厂联盟,为智能汽车技术发展提供互联技术支撑。
Volker Fricke提出标准化、数据隐私与安全是成功部署互联移动(Internet of Mobility)的重要元素[5]:
●标准在当今国际标准中至关重要,在当今国际标准中必不可少,互联世界确保互联互通性和互操作性;
●联网车辆和C-ITS领域相关标准的选择和推广具有挑战性,因为有时在同一领域竞争;
●需要采用端到端安全方法来应对实际和未来的威胁,并满足所有标准机构的合规要求;
●黑客的威胁将随着时间增加而增加,并通过联网车辆的进一步数字化威胁将进一步增加;
●端到端安全审查是处理这些威胁的关键;
●这将对当前车辆构架产生影响;
●汽车制造商和供应商应面对这样的新挑战。
Dr.Eckard Steiger提出了全球主机厂高度关注智能驾驶核心技术[3],包括:
●环境感知:所有场景高度可靠;
●认证和发布流程:智能驾驶车辆和系统保障;
●系统智能化:解释形式、规划、决策和执行;
●定位:实时更新高精地图;
●法律:全球标准和清晰的职责;
●系统构架:感知、ECU和执行机构冗余;
●可靠和安全:技术失效的保护和网络攻击的保护。