电子控制技术在汽车中的若干应用
2018-10-10
汽车电子化、智能化是现代汽车发展的重要标志之一。汽车电子的应用可以大幅度提升汽车的安全性、稳定性、舒适性等各方面性能。随着市场和产业的发展,汽车已不再是一种单纯的代步工具,而是成为了集休闲娱乐为一体的个性化产品。汽车电子技术产品刚好可以满足消费者这一需求。本文将从几个角度对电子技术在汽车上的应用进行总结。
1 自主驾驶及无人驾驶多电机电动赛车的扭矩矢量控制[1]
具有多个电动机的电动车辆支持连续的直接横摆力矩控制,也称为扭矩矢量控制。例如,通过延长车辆转向不足特性的线性区域,可以显著地增强转弯响应和获取最大横向加速度。对于传统的驾驶员操纵的汽车来说,这些技术有很好的表现和应用,但是有关自动/无人驾驶车辆所能提供信息很有限。特别是在过去几年中,用于自动驾驶的转向控制器在转弯极限驾驶中已经取得相当程度的提升,但目前还不清楚这些控制器应该如何与扭矩矢量系统整合到一起。
本文讨论了扭矩矢量控制的集成和自动驾驶,包括为新奇自动驾驶电动汽车比赛设计和完成的扭矩矢量控制器。该论文介绍了主要的车辆特性和控制架构(见文中Figure 3)。引入准静态模型来预测在不同纵向加速度下转向不足的特性。该模型与先前调查的离线优化扭矩矢量控制的潜在好处链接到一起。增益预定比例积分控制器增加偏航阻尼,从而增强瞬态响应。仿真结果证明了该方法的有效性。

Figure 3.Simplified schemartic of the TV control structure
案例研究电动赛车的转弯响应很明显受其空气动力学特性的影响,即车辆转向不足和转向过度的程度完全受车速影响并随车速而变。在一些操作条件下,没有扭矩矢量控制器的车辆被动响应不稳定。由前馈和反馈增益组成的相对简单的扭矩矢量控制结构允许塑造车辆转向不足的特性,并确保它们与纵向加速度的一致性。可以设计转弯极限处的非线性特性以实现稳定的操纵。需要时可以使用单输入单输出反馈PI控制器跟踪参考横摆率并限定车辆侧滑角。
2 一种应用于无信号交叉路口联通自动车辆的离散式能量控制最优框架[2]
本文解决了联通和自动车辆(CAV)在没有任何明确的交通信号条件下穿过市区十字路口的最佳控制的问题,以便在满足流量最大化要求的情况下而能量消耗最小化。表明流量最大化问题的解决方案仅取决于强加CAV的硬性安全约束条件和其结构实现了能量最小化离散的最佳控制问题模式。作者提出一个这些离散问题的完整解析解决方案,并推演出满足可行解决方案的所有安全约束条件。通过仿真说明了所提出的解决方案的有效性(见文中Fig.5),提出的离散框架具有实质性的双重效益,也改善了续驶里程。

Fig.5.Fuel consumption and average travel time improverment.
这种方法的含义是车辆没有在交叉路口停下来,从而节省动力和燃料,同时也增加行驶时间。此外,通过优化每辆车的加速/减速,最大限度地减少了发动机的瞬态操作,因此从燃油消耗方面也带来益处。已经解决了CAV在没有任何明显交通信号情况下穿越城市交叉口最佳控制问题。目标是尽量减少能耗受制于吞吐量最大化要求和严格的安全限制。表明后者的解决方案仅取决于对CAV施加了严格的安全限制条件,它的结构实现分散的能量最小化最优控制问题模式。作者提出了一个完整的分析解决方案,并推演出满足可行解决方案所有已有的安全约束条件。通过仿真验证了所提出的解决方案的有效性,该仿真表明所提出的框架优点是真实的。
3 使用卡尔曼滤波器和基于神经网络方法的精确定位车辆估算[3]
准确检测车辆位置在许多智能运输系统中起着重要作用,尤其是车-to-车应用。在本文中,作者提出了一种基于扩展卡尔曼滤波器(EKF)的方法来检测这种基于车辆的应用的全球定位系统(GPS)误差(文中Fig.2)。为了把卡尔曼滤波器参数与车辆定位校正GPS误差应用调谐好,提出了一种机器学习方法,作者还提供了在以前的车辆GPS轨迹上训练的自由神经网络模型用以预测当前的车辆位置。基于实际数据所完成的实验结果表明,这个用作探测和减少GPS错误系统有效。用于EKF参数调谐的机器学习算法可以通过车载学习得以推行。而所建议采用的GPS错误探测方法可以在车载应用当中加以推广。

Fig.2.Architecture of GPS error-correcting neural network.
从上述试验中,该系统经过基于固定线路所收集的数据训练和测试,但有多个驱动程序。作者使用相同的卡尔曼滤波器参数计算,见第4分章节B部分,但测试了一条全新的路线。这条路线在当地开车约9英里12 min(见文中Fig.13)。采用两个数据采集系统。第一个提供高质量的GPS测量结果,采样率为100 Hz。使用此设备捕获的信号被认为正确标记数据。第二个为拥有采样率为1 Hz的低质量设备。这个设备信号被认为是发送到卡尔曼滤波器的有噪音的输入信号。
如图14所示标绘出作为时间函数的卡尔曼滤波器估算错误细节。需要注意的是,运行开始时的错误量很大,但过了一段时间后,卡尔曼滤波器在去除噪声方面非常有效。

Fig.13.A new route consisting of 9 miles of city driving and approximatcly 12 minutes.
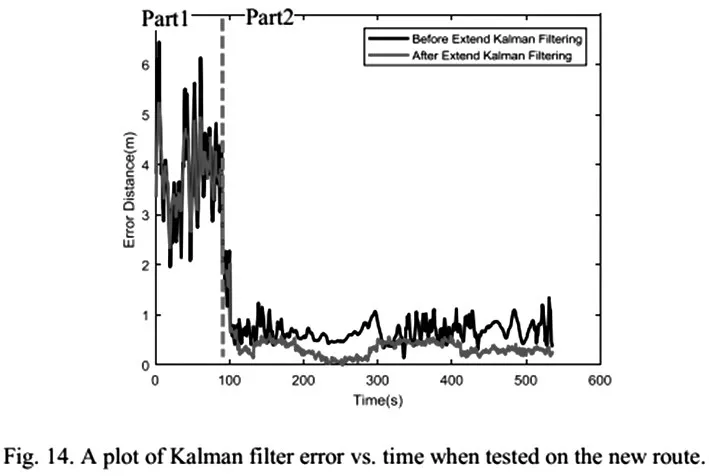
Fig.14.A plot of Kalman filter error vs.time when tested on the new route.
4 控制交通流量的方法—有限状态过渡模型的自动控制合成[4]
如今,随着人口越来越多,城市越发需要智能交通系统,以便有效利用现有的交通基础设施。然而,无效的交通流量管理是普遍存在的,包括69亿小时的额外旅行时间和31亿美元加仑燃料浪费。为了降低这些成本,下一代运输系统将包括互联车辆,互联的基础设施和提高自动化水平。此外,在可预见的未来,这些进步点必须与传统技术共存。这种复杂性使得改善移动性和安全性的目标更令人生畏。为了解决这种复杂性,需要为运输系统配备可变化和自动验证和综合技术。为了确保安全和改进移动出行,正规验证方法和集成控制系统是为人们提供很具有未来前景的自动化手段。最初开发了用于指定和验证软件和硬件系统的正确行为以及合成该系统的正规方法。现在一项重要的研究工作是确保这些这些方法对于传输系统是可变的,具有高度适应能力和可靠性。
本文将LTL视为规范语言。LTL允许考虑使用的特定时间范围重复申请运营商。其他时间逻辑,例如信号时间逻辑,允许直接包含时间范围,例如,通过指定某个时间逻辑观察发生在指定的时间范围内。另外,可以考虑概率规范并在合成控制器时包括最优性约束。特别是概率保证适用于运输管理等领域需要正确控制但不是绝对关键的。例如,规范可能是“概率为95%,交通链路仍未拥堵。
本文介绍了一种正式的控制方法:交通流网络。首先,一个动态模型可以控制重要的交通流现象(见文中Figure 8,Figure 9),例如考虑到流量受阻产生了拥堵。为了实现这个模型,我们做了几个简化的假设;例如,所有车辆都采用“单个商品”的观点假设行为相似。

接下来,本文回顾了基于有限状态抽象的系统离散时间动态有限记忆控制器形式合成的一般方法,这种抽象超越了潜在的动态。具体来说,对于每个输入,抽象至少可以实现可能的转换真实的系统。这种方法确保了适合抽象的控制器合成,可以保证真实系统满足相同的规范。
5 基于使用低成本传感器融合速度和航向角观测器的车辆定位[5]
车辆定位系统可用于各种汽车应用。本文主要关注实用性,提出了一种使用低成本传感器融合系统的新的车辆定位方法,它结合了全球定位系统的数据(GPS)以及来自易于使用的车载传感器的数据。作为车辆定位一部分,就车辆速度和航向角估算设计了一种新型非线性观测器。利用李雅普诺夫稳定性分析,研究了估计误差的收敛性。基于该估计信息,具有基于规则逻辑的新的自适应卡尔曼滤波器提供给人们更加稳健而且高度准确的车辆位置估算。它调整噪声协方差矩阵Q和R以便适应不同驾驶操控和不断变化的GPS条件等各种环境。通过使用商用车辆的试验结果验证整个系统性能。最后,通过比较研究,所提出的算法的有效性得以确认。
近年来,已经为智能交通系统(ITS)、自动车辆应用和高级驾驶辅助系统(ADAS)开发出车辆定位系统。特别是一些ADAS应用,如电子收费、交叉路口碰撞警告和弯路速度警告、与车辆定位有重要关联。值得注意的是,全球定位系统(GPS)变成大多数户外陆地导航的普遍使用的传感器。然而,标准商用GPS用于某些GPS停运条件,例如市区、隧道、和其它恶劣环境下还存在太多问题。
为了实现准确、不间断、可靠的车辆定位系统,许多研究人员和行业专家已开发出由其它传感器辅助的集成GPS。对于惯性导航系统(INS),由于其相对高的采样率和准确性,而被认为是常规的解决方案。
本研究提出了一种新的车辆定位方法(见文中Fig.1),包括非线性观测器和新的自适应卡尔曼滤波。使用低成本传感器融合的非线性观测器在车辆速度和航向角方面呈现出高精度和可靠的估算结果。另外,由于它易于调谐和实施,可以很容易地应用于生产。新的自适应卡尔曼滤波器,它具有针对卡尔曼增益基于规则的逻辑,可在各种驾驶条件和恶劣的GPS环境中提供稳定的估算性能。
综上所述,本文提出的车辆定位算法
与以往的研究不同:
(1)它伴随着速度和航向角估计,既可用于ITS应用也可用于车辆控制系统中;

Fig.1 Flowchart of the proposed vehicle positioning system
(2)基于低成本传感器融合,具有成本竞争力;
(3)它由于计算量小,可用性高、更新速度快、可靠估算性能,因此可以在生产中轻松实现。
本文证明了所提出的基于非线性观测器的自适应卡尔曼滤波器,可以为开发精确的车辆定位系统做出重大贡献。
