炮弹发射弹道目标精度校正估计仿真*
2018-10-08吴清怡吴中红
吴清怡, 吴中红
(海军工程大学 电子工程学院, 武汉 430033)
准确、实时的弹道估计可大幅度提高炮弹观测与校正的精确度,优化武器系统的作战效能.在实际弹丸定位过程中,常采用传感器[1-2]、全球定位系统[3-4]和雷达[5]等无线定位手段,以实现弹道的估计.但这些定位技术仍存在易受大气和噪声等环境因素影响,抗干扰性弱,测量实时性较低,不能对记录目标进行准确标记等问题.因此,本文采用超宽带(ultra-wide band,UWB)技术,利用该技术不易受环境因素影响、抗干扰性强、启动时间短、体积小、易安装和多条数据同时记录等优点,可有效解决上述问题.
文献[6-12]对几种弹道估计的滤波方法进行了分析对比.文献[6]提出了一种基于空域追踪的修正算法,通过非线性滤波器从原始信号中粗提出基线信号,利用多步迭代微分算子消除噪声误差;文献[7-8]采用扩展卡尔曼滤波(EKF)降低目标定位误差;文献[9-10]使用无迹卡尔曼滤波(UKF),通过提高滤波的收敛速度来实现优化估计精度的目的;文献[11]提出了引入积分预测算法来减少离散卡尔曼滤波器一步预测的误差;文献[12]采用方差补偿方法建立自适应卡尔曼滤波算法完成目标跟踪.其中,EKF由非线性方程进行泰勒展开保留一次项得到,由于其忽略了高次项使得精度降低,且EKF对初始值较敏感,设置不当易造成滤波发散,需要计算雅克比矩阵,复杂度较高;UKF是一种求采样点的非线性滤波方法,计算精度可达到二阶或三阶的泰勒展开精度,性能优于EKF,但当非线性系统维度大于3时,该方法很有可能受到非正定协方差的影响,造成滤波发散,使估计精度大大降低.
为了避免出现非正定协方差,本文采用平方根无迹卡尔曼滤波(square root unscented Kalman filter,SRUKF)进行弹道估计,仿真结果表明,EKF具有较低的复杂度,但估计精度明显低于SRUKF和UKF,且SRUKF与UKF相比具有较强的稳定性.综上所述,在针对六维弹道估计问题上,EKF、UKF、SRUKF三种滤波方式中,SRUKF具有最优越的综合性能.
1 模型建立
本文以质点弹道方程为依据建立模型,坐标系中Y轴与地面相垂直,弹丸质点坐标为(xk,yk,zk);各定位基站坐标分别为(x1,y1,z1),(x2,y2,z2),…,(xk,yk,zk),定位基站i相对于弹丸目标的俯仰角为αi,方位角为βi,定位系统模型如图1所示.

图1 定位系统模型Fig.1 Model for location system
1.1 系统状态方程
为了简化定位算法的复杂度,以质点弹道方程为依据建立系统状态方程,现假设弹丸为一质点,该质点的位置坐标与各方向上的速度表示为[x,y,z,Vx,Vy,Vz]T,则质点弹道方程组[13]可表示为
(1)

当y≤10 000 m时,空气密度函数依据经验公式[13]可表示为
(2)
空气阻力函数表达式[13]为
(3)

G(Vx)=4.737×10-4VCXONVx/Cs
(4)
综上所述,选取弹丸位置、速度(x,y,z,Vx,Vy,Vz)为状态变量,设X=[x1,x2,x3,x4,x5,x6]T,则离散状态方程可表示为
Xk+1= f(Xk)+wk=
(5)
式中:f()为状态转移函数;ΔT为抽样时间间隔;wk为过程噪声,其均值为零,协方差为Qk.该方程在计算过程中必然会存在受各种因素影响所产生的误差,因此需要对误差进行补偿处理.
1.2 系统测量方程
系统采用测量到达时间差与到达角度的方法建立系统测量方程.将1号定位基站设为参考基站,系统需要测量相对于参考基站各基站接收目标信号所需要的时间差Δti1,以及各个基站接收目标信号的俯仰角αi与方位角βi.
1.2.1 基于到达时间差的测量方程
基于到达时间差测量方程的表达式为
(6)
(7)
(8)
式中:ri为定位基站i与目标弹丸的距离;ti为第i个基站接收目标信号所需时间;t1为第1个基站接收目标信号所需时间;r1为第1个基站与目标的距离;c为电波传播速度.由式(6)~(8)可得基于TDOA算法的测量方程,即
vk-TDOA
(9)
式中,vk-TDOA为测量到达时间差的测量噪声.
1.2.2 基于角度的测量方程
设第i个基站测得目标俯仰角为αi,方位角为βi,则有
(10)
由式(10)可得,基于AOA方法的测量方程为
vk-AOA
(11)
式中,vk-AOA为测量角度时的测量噪声.
1.2.3 到达时间差与角度联合的测量方程
基于到达时间差与角度联合的测量方程所需测量值为z=[ri1,α,β]T,则测量方程为
(12)
2 SRUKF滤波算法
无迹卡尔曼滤波算法(UKF)通过选取一组采样点(sigma点)来计算系统的协方差,有效提高了估计精度,降低了算法复杂度,在解决非线性问题中具有广泛的应用[14].但是,该方法在使用过程中可能会出现非正定协方差,导致滤波不稳定甚至发散.为了解决这一问题,Steven等[15]于2008年提出平方根无迹卡尔曼滤波.SRUKF建立在UKF的基础上,直接利用协方差矩阵的平方根参与递推运算,避免了协方差的非正定性,能有效提高滤波稳定性.
使用SRUKF算法,首先需要建立非线性的状态方程与测量方程[16],即
(13)
具体步骤如下:
1) 初始化,其表达式为
(14)
(15)
式中,Xa为扩充状态向量,Xa=[XT,WT,VT],XT为状态变量,WT为系统噪声,VT为观测噪声.
2) 选取权值,即
(16)

3) 取sigma点,即
(17)

4) 预测误差协方差,其表达式为
(18)
式中:qr表示QR分解;cholupdate表示choleskey一级更新.
5) 预测互协方差平方根,计算一步预测、方差以及互协方差平方根,其表达式为
(19)
6) 计算状态误差方差平方根,即
(20)
结合式(14)~(20),通过UWB设备中定位基站测得的炮弹坐标为系统提供采样点,则可实现基于平方根无迹卡尔曼滤波算法的弹道估计.
3 算法仿真及结果分析
在实弹试验中设置坐标系,将发射起点布设在X0=[20 000,0,80,-879,190,-12]T坐标点上,定位基站分别布设在坐标原点、(50,0,0)、(-50,0,0)三个坐标点上,发射后,通过高清摄像和UWB设备可得两组轨迹,如图2所示.由高清摄像所得轨迹为炮弹实际运动轨迹,通过UWB设备所得轨迹为炮弹测量轨迹.由图2可知,UWB测量轨迹相对误差较大,需对其测量结果作进一步校正.在上述试验的基础上,使用EKF、UKF、SRUKF三种滤波算法对UWB测量轨迹进行仿真处理,并分析仿真结果.首先设状态变量X=[x,y,z,Vx,Vy,Vz]T的初始值为X0=[20 000,0,80,-879,190,-12]T;测量TDOA的定位基站坐标分别为BS1(50,0,0)、BS2(-50,0,0);测量方位角与俯仰角角度的定位基站坐标为BS3(0,0,0);ΔT为0.25s;纵风Wx为10m/s;横风Wz为10m/s;过程噪声方差q=1;距离测量噪声标准差σr=50m;角度测量噪声标准差σα=σβ=0.5°.
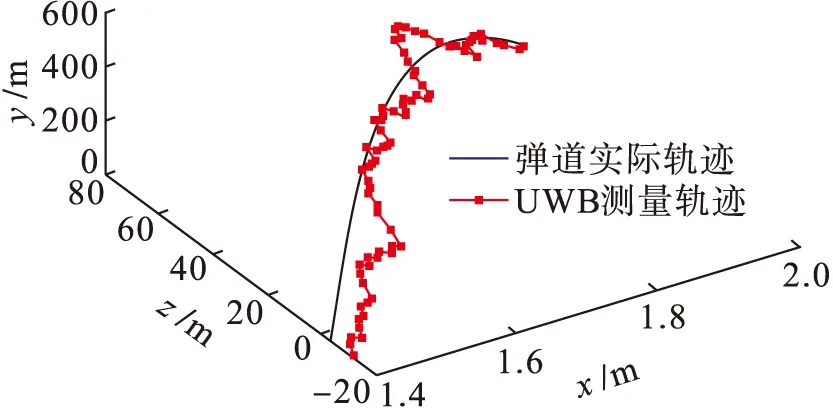
图2 弹道运动轨迹与测量轨迹Fig.2 Motion and measurement trajectories
现以均方根误差(root mean square error,RMSE)为评判依据,对EKF、UKF、SRUKF三种滤波的性能进行仿真与分析,即
(21)
根据设置初始条件和参数,进行300次Monte-Carlo仿真,其中,UKF算法在运行过程中由于出现非正定协方差矩阵将仿真次数缩减为200次,EKF、UKF、SRUKF三种滤波算法所得目标位置与速度的误差对比曲线如图3、4所示,误差均值对比如表1所示,200次Monte-Carlo仿真运行时间对比如表2所示.
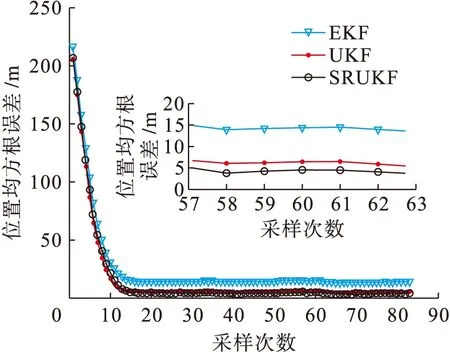
图3 三种滤波方式的位置均方根误差Fig.3 RMSE of position for three filtering ways
由图3、4可以看出,在三种滤波方式中,SRUKF估计精度最高,UKF略低,EKF估计精度明显低于前两者.由表1可以看出,SRUKF较EKF和UKF的位置估计精度分别提高了42.11%和9.84%,速度估计精度分别提高了31.13%和7.98%.由表2可以看出,UKF与SRUKF所需时间分别是EKF的2.8和2.4倍,由此可知,EKF复杂度明显低于UKF和SRUKF,SRUKF由于直接使用协方差的平方根进行递推和计算,其复杂度略低于UKF,运行时间是UKF的86%.
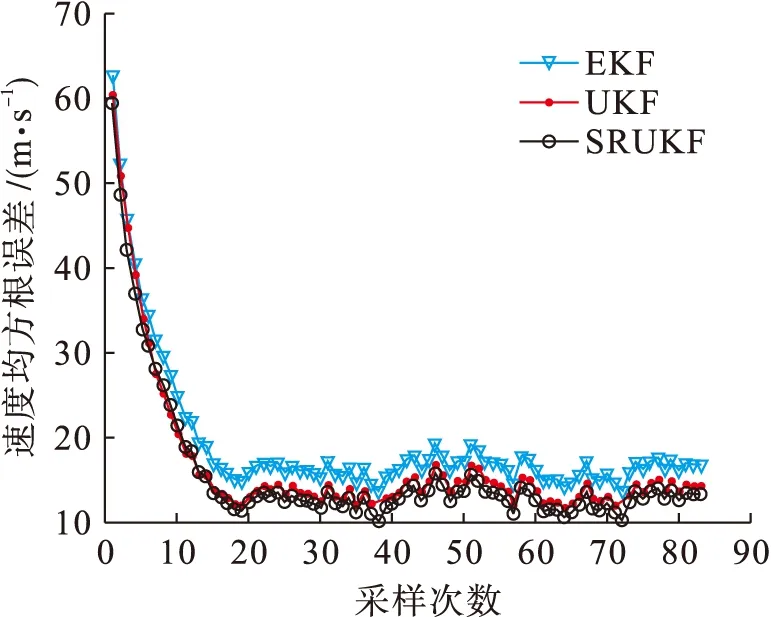
图4 三种滤波方式的速度均方根误差Fig.4 RMSE of speed for three filtering ways 表1 各算法精度对比Tab.1 Comparison in accuracy of each algorithm

表2 三种滤波方式运行时间Tab.2 Running time of three filtering ways
4 结 论
通过仿真试验表明,采用SRUKF进行滤波估计能较好地克服UKF的协方差非正定和复杂度较高等问题,且估计精度较EKF与UKF相比均有所提高,保证了弹道估计的高效性、稳定性及精确度.但在试验过程中发现,该方法在使用的过程中,基站的布设以及噪声的不确定性对定位精度仍具有较大的影响,需要做出进一步的研究和改进.