永磁同步电机SVPWM调制原理图解分析
2018-10-08黄葳
黄 葳
(南京越博动力系统股份有限公司,江苏 南京 210000)
永磁同步电机常见的控制方法有梯形波法、正弦脉宽调制法(SPWM)、空间矢量脉宽调制法(SVPWM),其中空间矢量脉宽调制算法相对其他两种方法具有较高的系统效率。目前讨论SVPWM算法大多使用CLARK变换与PARK变换(将ABC三相静止坐标系变换成αβ两相正交静止坐标,再用αβ坐标系描述正交旋转坐标dq,最终通过dq合成所需量)。CLARK变换与PARK变换原理不易理解,并且其复杂的推导过程和大量的计算公式让许多初学者望而生畏。
本文通过图解分析的方法,简明扼要地论述永磁同步电机空间矢量调制(SVPWM)原理。并以此计算出三相桥臂门极驱动PWM占空比与调制系数、矢量电压角度的关系。
1 基本电压矢量
三相桥电压型逆变器如图1所示。桥臂的开通用“1”表示,桥臂的关断用“0”表示。

图1 三相电压型逆变器
由于相同桥臂不允许同时开通以避免桥臂短路,因此三相逆变器桥臂的工作状态由a、b、c三个场效应管的工作状态决定,对应8种基本电压矢量,见表1。
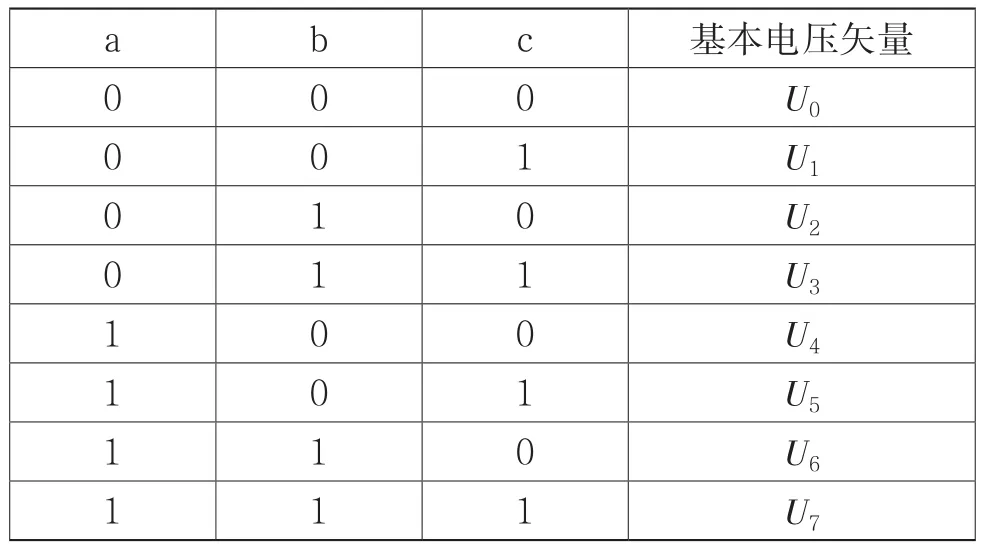
表1 桥臂状态及其相应基本矢量
假设ABC相线的位置如图2所示,假设射线AN方向为0°方向。
当桥臂工作状态为000和111时:|UAN|=|UBN|=|UCN|=0;所以合成的基本电压矢量U0、U7为0。
当桥臂工作状态为001时:
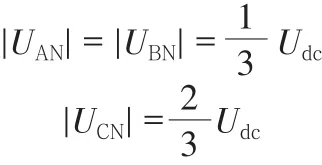
基本电压矢量U1如图3所示。
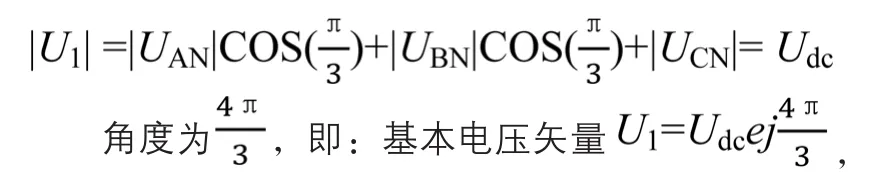

图2 三相线分布图
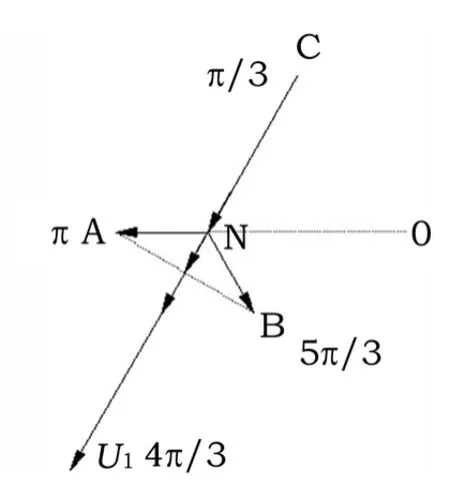
图3 基本电压矢量U1

图4为所有基本电压矢量分布情况。
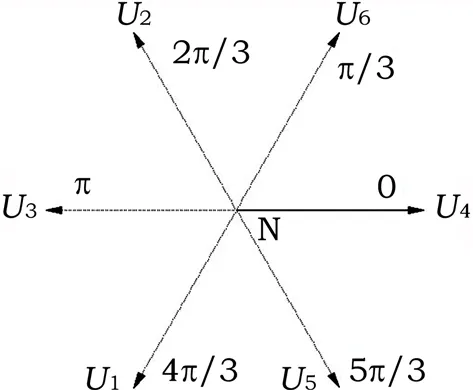
图4 基本电压矢量分布
2 SVPWM调制原理
下面讨论利用6个基本电压矢量如何调制任意角度的电压矢量。设任意角度的电压矢量U大小为|U|,角度为θ。电压矢量U由两侧相邻的基本电压矢量通过作用时间的长短合成。令U1到U6的作用时间分别为T1到T6。假设门极驱动PWM信号周期为TS。
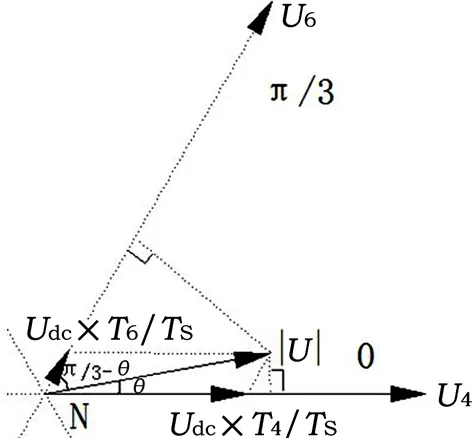
图5
由图5可知,电压矢量U在基本电压矢量U4方向上的分量为:

由此可算出

电压矢量U在基本电压矢量U6方向上的分量为:

由此可算出

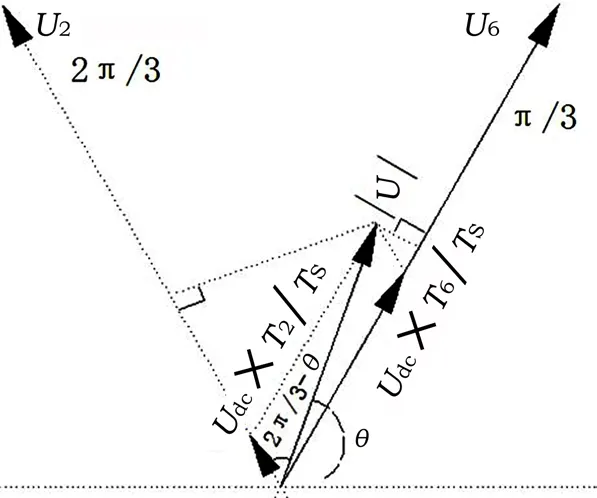
图6
由图6可知,电压矢量U在基本电压矢量U6方向上的分量为:

由此可算出

电压矢量U在基本电压矢量U2方向上的分量为:

由此可算出
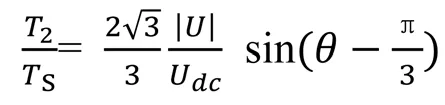

图7
由图7可知,电压矢量U在基本电压矢量U2方向上的分量为:

由此可算出
电压矢量U在基本电压矢量U3方向上的分量为:

由此可算出
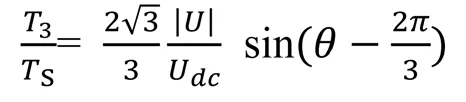
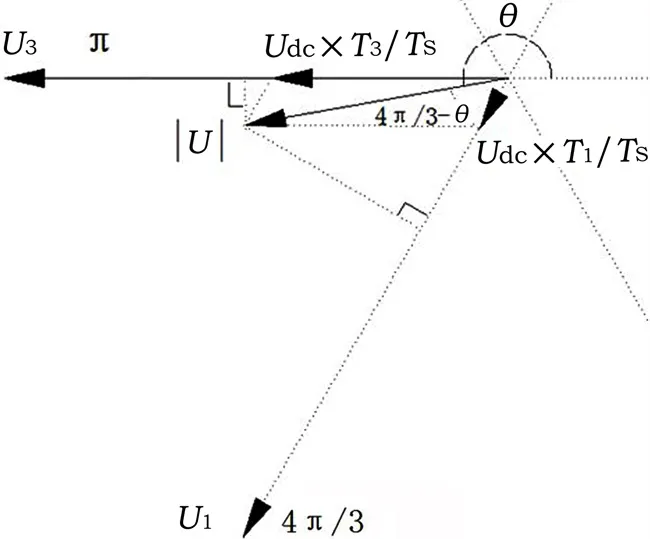
图8
由图8可知,电压矢量U在基本电压矢量U3方向上的分量为:

由此可算出
电压矢量U在基本电压矢量U1方向上的分量为:

由此可算出
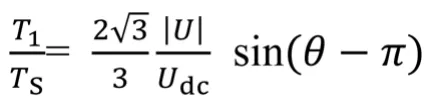
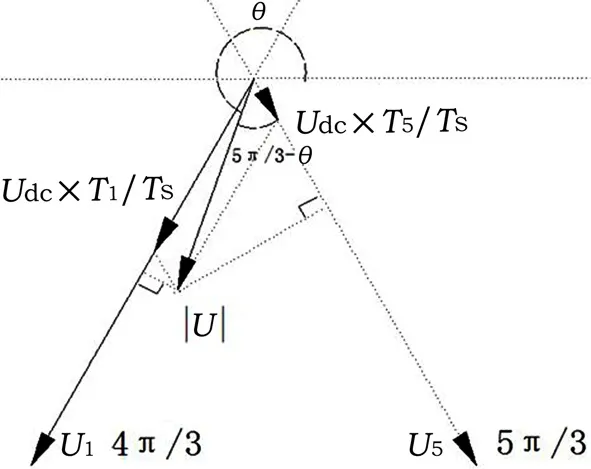
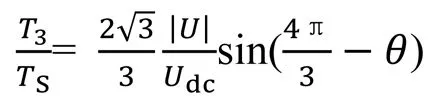
图9
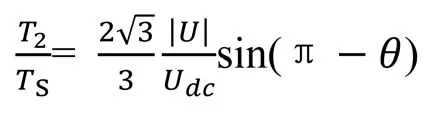
由图9可知,电压矢量U在基本电压矢量U1方向上的分量为:

由此可算出

电压矢量U在基本电压矢量U5方向上的分量为:

由此可算出
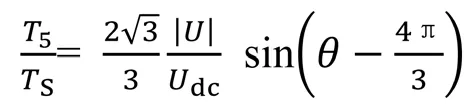
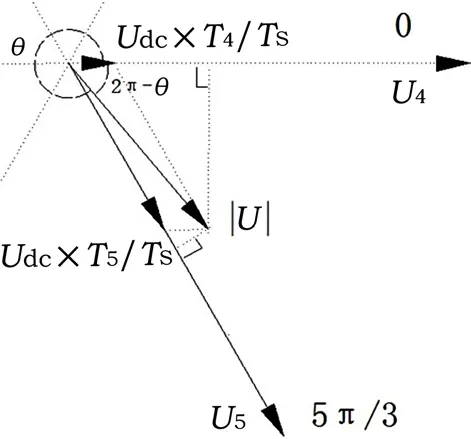
图10
由图10可知,电压矢量U在基本电压矢量U5方向上的分量为:

由此可算出

电压矢量U在基本电压矢量U4方向上的分量为:

由此可算出

综上,可用表2总结以上公式。
3 基本电压矢量U0、U7的使用
在SVPWM调制方案中,零矢量的适当选择可以最大限度地减少开关损耗。在每次开关状态转换时,只改变其中一相的开关状态。并且对零矢量在时间上进行平均分配,以使产生的 PWM 对称,从而有效地降低 PWM 的谐波分量。可以发现当U4(100)切换至U0(000)时,只需改变A相上下一对切换开关,若由U4(100)切换至U7(111)则需改变 B、C 相上下两对切换开关,增加了一倍的切换损失。因此,要改变电压向量 U4(100)、U2(010)、U1(001)的大小,需配合零电压矢量U0(000),而要改变U6(110)、U3(011)、U5(101),需配合零电压矢量U7(111)。
因此,a、b、c门极驱动PWM波形与调制后电压矢量的关系如图11~图16所示。

表2 基本电压矢量作用时间与调制电压矢量的关系

图11 门极驱动

图12 门极驱动

图13 门极驱动

图14 门极驱动

图15 门极驱动

图16 门极驱动
设非零基本电压矢量Ux、Uy作用时间为Tx、Ty(x、y=1、2、3、4、5、6),则
4 调制后电压矢量的取值范围
如图17所示,线段U6,U4所在的方程为:

转换成极坐标方程得:

可得线段U6,U4极坐标方程为:

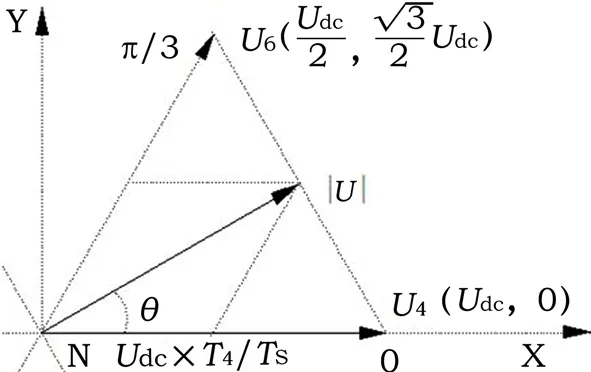
图17 矢量的坐标表示
同样由图17得:

当T4+T6= Ts时

由于
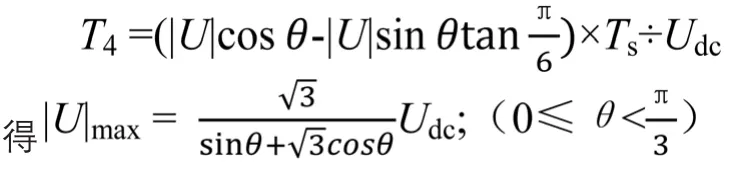
可以发现|U|max= r,即调制后的电压矢量的最大值与线段U6,U4重合。当θ =时,|U|max最小,等于。如图18所示,当|U|小于六边形的内切圆时,旋转角度可取任意角度。因此为最大不失真调制系数。
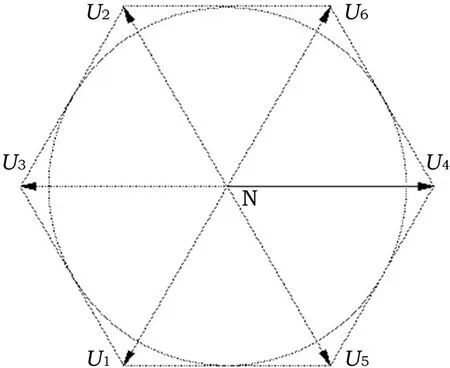
图18 调制后电压矢量范围
5 调制算法实际验证
电机为18槽7对极永磁同步电机,利用飞思卡尔单片机MC9S12系列进行算法编程。实测门极驱动波形见图19,相电压波形见图20,线电压波形见图21,相电流波形见图22。由于电流传感器测量精度为20mV/A并且电机电流很小,所以测得的电流波形受纹波电压影响较大,失真比较严重。
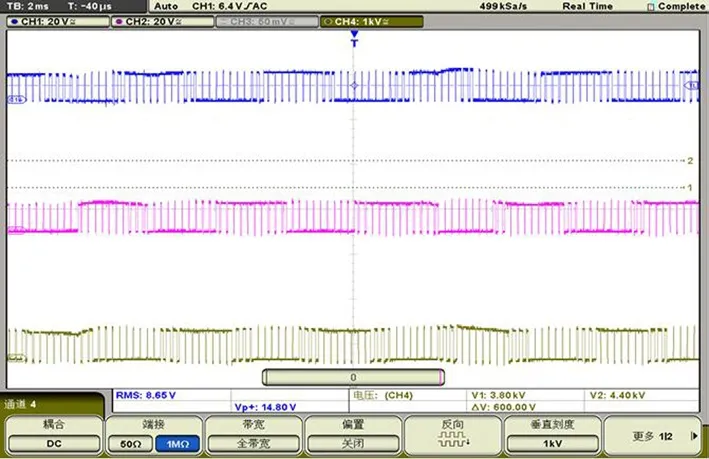
图19 门极驱动波形

图20 电机相电压波形
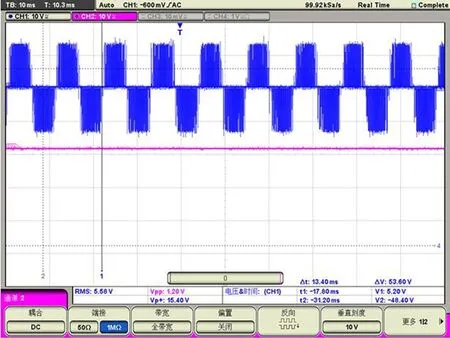
图21 电机线电压波形
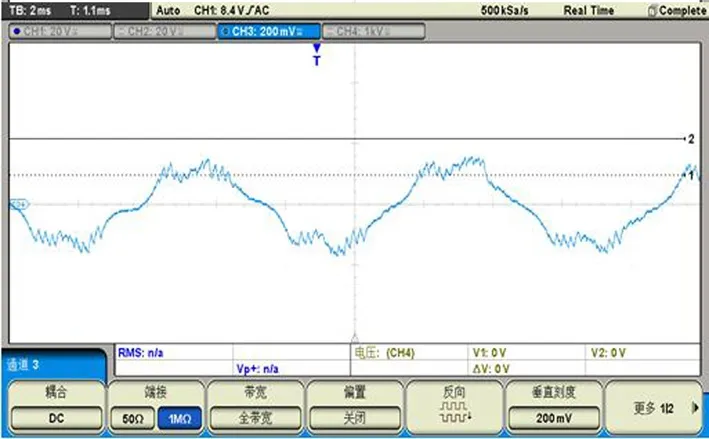
图22 电机A相电流波形
6 结论
通过以上对SVPWM调制原理的图解分析和实际测试,验证以上所述的准确性。通过此种SVPWM调制算法,避免CLARK变换和PARK变换,容易实现。