基于无线传感网络和CAN总线技术的综采面喷雾降尘系统*
2018-09-27吕自力
丁 飞, 吕自力
(辽宁工程技术大学 机械工程学院,辽宁 阜新 123000)
0 引 言
综采工作面采煤机截割煤岩时产生大量粉尘,虽然采煤机自身携带内喷雾降尘装置,但效果甚微,通常在综采工作面液压支架上安装外喷雾降尘装置弥补采煤机内喷雾降尘装置的不足[1,2]。文献[3,4]对综采工作面采煤机外喷雾系统进行了深入研究和改进,提高了综采工作面采煤机外喷雾系统的喷雾降尘效率。以上研究多采用红外传感装置对采煤机运行位置进行检测,在实际综采工作面中得到广泛应用,但也存在一定的弊端。
本文设计的基于无线传感器网络(wireless sensor networks,WSNs)和控制器局域网(controller area network,CAN)总线技术的综采工作面喷雾降尘系统能够对采煤机工作状态、实时位置等信息进行采集,进而联动控制液压支架外喷雾降尘装置工作,实现综采工作面的高效降尘[5]。
1 综采工作面喷雾降尘控制网络
系统总体结构如图1所示。

图1 系统总体结构
由于综采工作面环境恶劣、复杂,结合CAN总线和ZigBee无线传感网络组成综采工作面喷雾降尘控制网络,发挥各自网络的优势,能够提高综采工作面喷雾降尘控制网络的高效性和实时性[6]。
在采煤机身上安装有基于WSNs技术的终端节点,能够采集采煤机的运行速度等状态参数,通过WSNs传输至液压支架上的路由节点,同时根据定位算法能够确定传感节点的实时位置,即采煤机实时位置。将采煤机实时工作状态和位置信息通过高效CAN总线传送至主控制器。主控制器根据预先设定的控制程序以及综采工作面各关键设备运行状态和风流方向确定外喷雾装置工作,通过CAN总线下发控制指令,实现外喷雾装置跟随采煤机工作位置进行高效喷雾降尘,主控制器能够将外喷雾系统控制信息和状态信息通过井下以太环网传输至井上的上位机监控系统,上位机监控系统亦可向下发送远程手动控制信号或进行远程参数设置。
通常综采工作面内风流方向固定,采煤机沿着刮板输送机来回截割煤岩时会有顺风采煤和逆风采煤之分,顺风采煤和逆风采煤时粉尘漂移距离不同,因此液压支架下方的外喷雾装置工作状态要对应调节。
2 监控网络硬件系统
系统硬件主要由无线传感器节点以及通信装置组成。在ZigBee网络中主要包含协调器、路由节点以及终端节点三种节点类型。无线传感器节点主要由路由节点、终端节点以及外围采集控制模块组成。
每个传感节点可以通过网络协议组合成ZigBee网络,通信装置为网络的主控节点,这种路由能够在维持网络结构的基础上将网络节点与CAN总线连接起来,通过该模块还能够传输后台服务器和网络节点之间的数据。
本文的无线传感器网络系统的主控芯片为TI 公司2.4 GHz射频芯片CC2530。图2所示为CC2530最小系统的硬件电路。为了保证主控器的正常运行必须要保证最小系统电路设计的完善性。

图2 CC2530最小系统电路
1)无线射频电路
在设计无线射频电路的过程中,单端口和双端口之间的转换可以通过巴伦电路来实现,并保证馈线和天线的匹配达到最优的状态。无线射频匹配电路,如果需要将数据通过CC2530模块向外发送,差分射频端口 RF_P,RF_N可向巴伦电路发送数据,完成单端信号的命令后可利用天线发射。如果数据需要通过CC2530模块接收,巴伦电路能够转换天线接收到的信号并向RF_P,RF_N 端口进行发送。
2)供电电路
采用220 V交流电源供电,利用稳压芯片LM7812、桥堆以及变压器转换为5V直流电源和12 V直流电源,分别供给传感采集电路和控制器工作。经LM1117—3.3芯片5 V直流电源可以转换为供给外围电路和CC2530芯片工作的3.3 V直流电源。
由于无线模块的主控芯片CC2530无法直接与CAN总线芯片连接,因此,本文设计的路由节点采用STC89C52+CC2530双MCU形式。双MCU之前采用通用异步收发传输器(universal asynchronous receiver/transmitter,UART)串行通信模式,解决不同控制芯片之前的电平兼容问题[8]。基于SJA1000芯片CAN总线模块接口电路如图3所示。
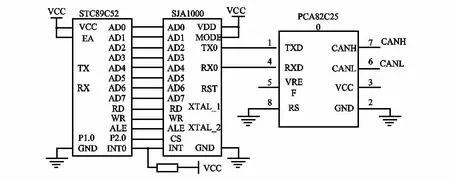
图3 基于SJA1000芯片的CAN总线模块接口电路
3 系统软件设计
3.1 基于WSNs的采煤机运行位置检测
与传统的外喷雾系统采用红外传感装置检测采煤机运行位置不同,本文使用WSNs技术对采煤机运行位置定位。
设P为需要定位的采煤机节点,如果只存在1个测量参考点,那么只能对P点的相对位置进行测量,该点在以R1为半径,A为圆心的圆周上。如果存在2个参考点,那么2个点为圆心所对应的圆会产生2个交点,因此2个交点中的一点为P的位置,但对于具体的点无法确定。如果存在3个参考点R1,R2和R3,可以得到3个点(A,B,C)的相对距离,通过解析几何即可对计算P点位置。因此,只要3个参考点未处于同一条直线上即可准确定位[9]。
由于液压支架上安装的路由节点呈直线型排列,因此无法找到满足条件的点A,B,C,但由于采煤机节点P运动轨迹基本为直线,或与正对的液压支架相对位置不变,即P点在y轴方向上距离A,B点距离始终为一定值。如图4所示。
设液压支架的路由节点A和B以及采煤机节点P的坐标分别为(xa,ya)、(xb,yb)和(xp,yp)。采煤机节点P至路由节点A和B的距离设定为dpa和dpb。则各节点坐标和距离具有如下关系式,可据此判断采煤机节点P的位置
(1)
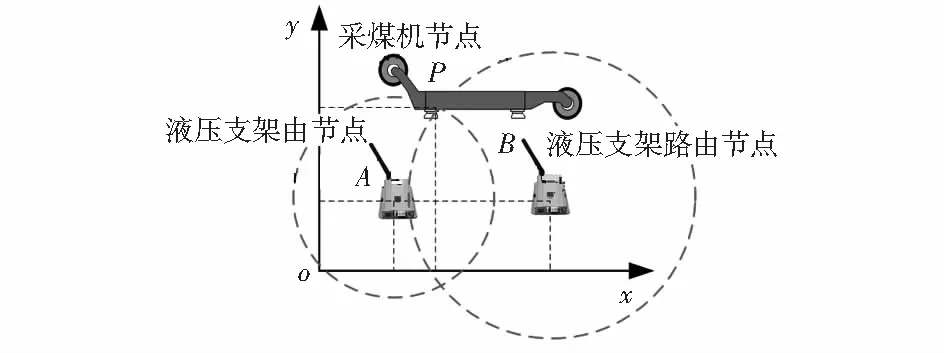
图4 采煤机节点P定位原理示意
3.2 终端节点软件设计
终端节点一般在上电后初始化系统,之后扫描通信范围内的路由节点,并在搜索到可用路由节点后申请加入该节点,以向该节点发送数据。终端节点软件流程如图5。
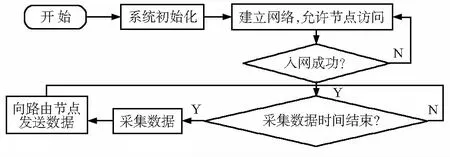
图5 终端节点软件流程
3.3 路由节点软件设计
相比于终端节点的软件设计,路由节点的软件设计难度比较大,除了对相关数据进行接收,还要保证其他功能的完成,具体表现为:
1)路由节点在WSNs中是网络的协调者,负责分配网络地址并组建网络,同时交换终端节点的ZigBee;
2)2个不同的网络由路由节点连接,由于在数据帧格式上2个网络传输具有比较明显的差距,经过路由节点可以将WSNs数据转换,所转换的数据帧格式在CAN总线上传输,保证转换2个不同网络数据帧,其效果等同于网关;
3)路由节点相当于CAN节点,在接收到湿度和温度的相关数据以后即可向工业控制端发送CAN数据包。
CAN总线以及WSNs之间的通信可以通过路由节点来实现,上电复位后首先建立网络,然后终端节点可以通过发送指令实现加入,在接收到指令后传感器采集节点处理采集到的数据,并向路由节点发送,在对数据进行校验和分析后路由节点即可利用CC2530模块向CAN节点发送数据,最后数据经过CAN总线向地面监测中心传送,图6所示为路由节点的工作流程。
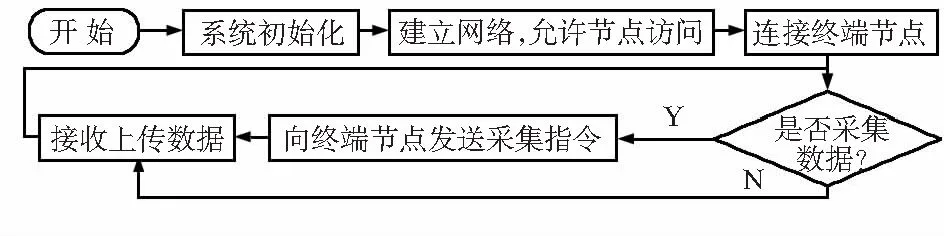
图6 路由节点软件流程
3.4 SJA1000收发程序
初始化SJA1000芯片后,进入工作模式。首先开启中断,通过访问状态寄存器确定总线状态。报文在总线处于空闲状态时发送报文。判断报文格式以及SJA1000状态,当发送位处于中断状态时可关闭中断进入到发送模式。判定所发送的帧是否为数据帧,在SLA1000发送缓冲区中对应的CAN帧位置写入报文,本文需要将8B数据写入到缓冲区中。在向SJA1000缓冲区正确写入数据后可启动SLA1000,成功发送1次报文。当缓冲器锁定时说明报文正处于发送状态,无法访问缓冲区。
在中断接收过程中,SJA1000能够接收报文,CAN控制器能够在64B的接收缓冲区中依次存入接收的数据。当完成数据接收后,接收缓冲区在接收寄存器中填充相关数据,并发出中断信号,该中断信号用于单片机的外部接收中断,在接收相应中断以后微控制单元对读取接收缓冲区中的数据,进而清空CAN控制器的接收寄存器,完成CAN总线数据接收过程[11]。
4 监控网络通信测试
地面环境模拟井下采煤机与液压支架,实现监控网络通信测试。通信测试主要针对ZigBee无线网络和CAN总线网络通信。
使用CAN总线分析仪测试CAN模块与上位机通信情况进行,在上位机上的ECAN Tools分析软件显示CAN总线上设备与上位机上通信正常。
5 结 论
本文研究了一种基于CAN总线和ZigBee技术的综采工作面喷雾降尘监控网络。测试结果表明,设计的监控网络能够实现上位机与各节点的正常通信,满足设计要求。