柔性蒙皮形状监测的光纤光栅传感及重构方法*
2018-09-27张俊康孙广开祝连庆
张俊康, 李 红, 孙广开, 祝连庆
(北京信息科技大学 光电信息与仪器北京市工程研究中心,北京 100016)
0 引 言
飞行器的气动特性由柔性蒙皮的形状直接决定,必须采用有效的技术方法实时监测柔性蒙皮的变形形状,使其达到既定的变体形状和位置精度,对保证飞机高速飞行状态下的气动特性、机动性、稳定性和安全性至关重要[1]。
作为柔性蒙皮的主要研究方向之一的柔性表层结构[2],就融入结构基体的分布传感技术而言,光纤Bragg光栅[3,4](fiber Bragg grating,FBG),构成的柔性蒙皮适用于机翼变形物理量的实时监测,可将光纤传感技术与面型重构方法和图形可视化技术结合起来,根据光纤传感网络测得的飞机机翼各测点应变等物理量信息,重构变形后的三维形状,实时监测机翼变形姿态。
在国外,美国LUNA创新公司的Duncan R G等人[5]利用波分复用的光纤光栅传感器阵列构建光纤全局定位系统,实验数据表明利用光纤传感技术可以准确重构出结构的二维和三维形状,误差值可以达到1.2 %。Blandino J等人[6]研究了FBG传感器对飞机吊杆结构弯曲形状和运动跟踪的传感。Kressel I等人[7]将光纤光栅传感器嵌入用于临床手术的器械中,利用传感器的监测信号实现对手术器械在体内腔道中的形状和位置进行实时监测。Jutte C V等人[8]在机翼地面载荷试验中,利用光纤光栅传感器阵列进行了全尺度机翼弯曲和扭曲形态的测量。国内,上海大学钱晋武教授课题组的邱亚等人[9]研究了利用光纤光栅传感器测量空间曲率信息进而对线性、杆形结构形态重构的方法。张合生等人[10]研究了太空柔性伸展机械臂的光纤光栅传感与重构方法。狄海廷等人[11]提出了利用环形光纤曲率传感器进行三维曲面重构的方法。与国外相比,目前我国在针对变体飞机柔性蒙皮形态的光纤传感技术方面,针对性的研究工作十分匮乏、技术差距明显,而国外一贯实行严密的技术封锁。因此,本文对硅胶板构成的变形机翼柔性蒙皮,建立机翼曲面的仿真模型,在变形机翼实验原型的基础上对柔性蒙皮变形角度进行测量。
1 形状重构原理
柔性蒙皮三维形状重构近似为空间面型的曲面重构问题。根据曲面微分几何学,曲率信息是曲线、曲面的关键表征参量,曲率和弧长信息决定的曲面的唯一形状,在实时监测时,通过FBG得到测量点的应变信息,进而转化为该点的曲率信息。
1.1 曲率检测原理
FBG传感器的中心波长为
λB=2neff·Λ
(1)
式中λB为FBG的中心波长,neff为有效折射率,Λ为光栅周期。温度保持恒定时,光纤光栅受纵向拉伸或压缩作用,即其仅受轴向应变ε,光栅周期Λ将会改变,此时中心波长会发生漂移ΔλB为ΔλB=λB·(1-Pe)·ε,Pe为光纤的弹光系数。FBG的被测点可以建模为圆形截面的变形梁,当对其施加一个轴向应变时,变形梁上下表面会同时承受拉伸和压缩,会形成一个圆弧,如图1所示。在变形弯曲变形区内,在缩短和伸长的两个变形区之间,应变中性层的长度始终不变,即应变量为0。图中虚线表示中性层,L为微元长度,ΔL为结构微元长度的变化量,ρ为曲率半径,θ为圆弧的圆心角[12]。
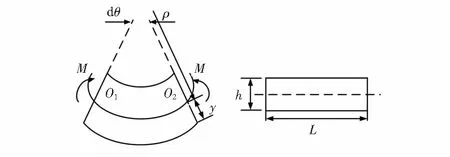
图1 曲率推导模型

(2)
对于FBG传感器,λB,h,ΔλB,Pe均为常量,因此式(2)中A为常数,曲率k的大小与ΔλB呈线性关系,只要检测FBG传感器测点的中心波长变化量ΔλB即可获得k的大小,为基于曲率信息的机翼原型曲面重构算法提供基础数据。
1.2 曲面重构算法
将曲面离散为多条平面曲线,首先完成曲面上多条曲线的重构,然后通过B样条插值的数值计算方法实现曲面重构。

(3)

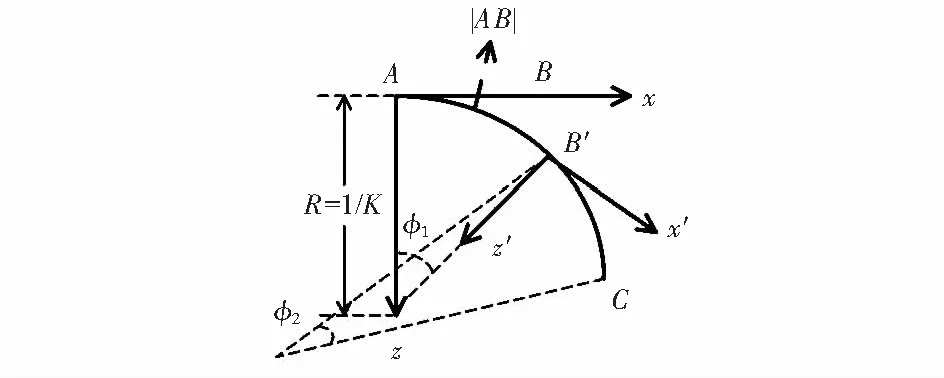
图2 曲线上点坐标计算几何模型
图3为曲面变形角度计算示意,本文曲面变形角度的定义是曲面在xz平面的投影曲线末端切线与x轴的夹角,即图中两个虚线的夹角。图中曲线C为曲面在xz平面内的投影,则曲面的变形角度为θ=α+Δα。
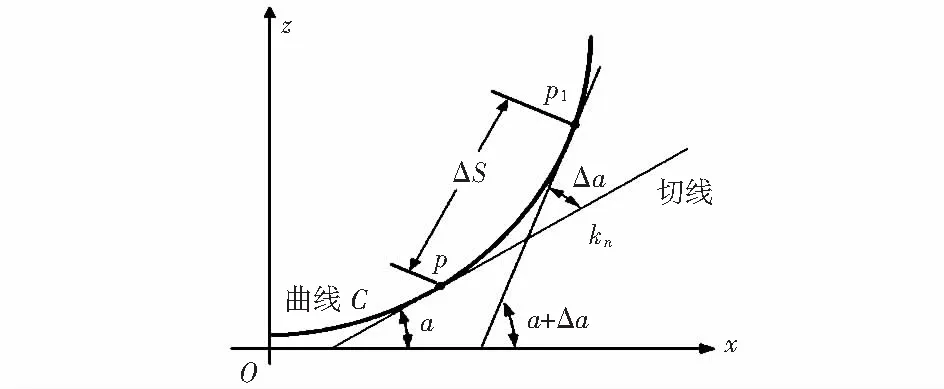
图3 曲面变形角度计算示意
2 实验系统设计
采用一台ASE宽带光源作为试验用光源,光源为c波段:1 530~1 565 nm;采用实验室紫外刻写的光纤光栅作为传感器,FBG波长为:1 536.53,1 539.76,1 544.25,1 546.33,1 557.37,1 561.43 nm;采用一台笔记本电脑作为上位机,用来显示柔性蒙皮面型重构结果;采用一台实验室自主研制解调仪作为实验的解调装置,解调仪CCD像素为512,解调速率最高可达17 kHz,实验用解调速率为100~200 Hz ,保证动态实时显示结构形态和准确定位。采用自主设计的柔性机翼原型作为实验对象,翼梁材质为钢,翼肋材质为航空专用铝合金,机构变形的驱动为电机驱动。采用上海力全橡塑有限公司生产的硅胶薄板作为柔性蒙皮的材料,硅胶薄板的厚度为0.05 mm。
将两块硅胶用道康宁732单组份多功能密封橡胶粘起来,然后将光纤光栅传感器夹在两块硅胶中间。以此保证柔性蒙皮的变形能够更好地传递到传感器,布局方式为:传感器之间间隔10 cm,沿机翼弦向变形方向等间距布设,保证柔性蒙皮变形时产生的弯曲形变方向与FBG轴向感知方向一致。
柔性蒙皮曲面重构过程原理如图4所示,状态一为蒙皮初始状态下的平面,状态二为蒙皮变形后的曲面,由状态一到状态二过程中,FBG传感器拉伸,中心波长漂移,解调仪解调出中心波长的漂移量,利用曲面拟合程序将中心波长的漂移量计算为每个点坐标值,最后在坐标系中拟合出蒙皮变形后的曲面。

图4 曲面重构过程原理
3 仿真分析
通过实验标定出FBG与硅胶板粘贴时应变系数,构建柔性蒙皮仿真模型,验证柔性蒙皮曲面重构算法的可行性。
建立的硅胶蒙皮模型尺寸为40 mm×10 mm,蒙皮厚度为1 mm,曲面变形角度与被测点曲率的关系为变形角度为-30°,10°,20°,30°时,对应曲率分别为-1.047 2,0.349 1,0.698 1,1.047 2。在MATLAB中将曲面的变形角度对应的曲率作为输入,利用曲面重构算法及可视化技术对曲面进行重构,图5为对应的仿真曲面。
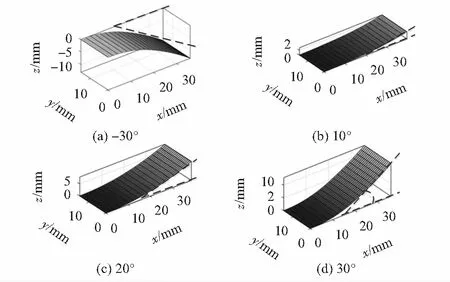
图5 不同变形角度曲面重构仿真
4 实验与结果分析
柔性蒙皮形状重构实验系统驱动器为步进电机,电机减速比为1︰90,通过电机控制器控制输出脉冲进而控制步进角,变形机翼采用4轴旋转结构,第1个轴为固定轴,通过调节另3个驱动轴转动不同的角度实现机翼的变形,机翼带动柔性智能蒙皮变形。解调仪将FBG的中心波长上传给上位机,解算波长漂移量,换算为被测点的曲率信息,由曲面重构算法重构翼面形状。
实验过程中柔性智能蒙皮的变形角度为15°,30°,分析可知:当柔性蒙皮变形角度增加时,FBG中心波长红移,当变形角度减小时,FBG中心波长蓝移,但不同位置传感器漂移量不相同,如图6所示,因为变形机翼变形时不同的旋转轴旋转角度不相同,导致不同位置的传感器的变形量不相同;由分析可知,柔性蒙皮变形角度与FBG传感器中心波长漂移量呈线性关系。
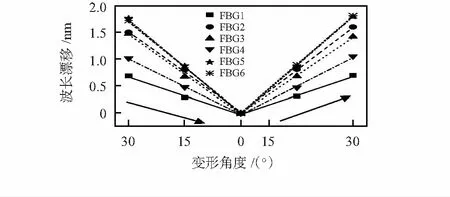
图6 不同位置FBG波长漂移量与变形角度的关系
5 结 论
1)基于曲率的曲面重构算法实现柔性蒙皮的曲面重构具有可行性,为变形机翼柔性蒙皮监测的实现奠定了理论基础。
2)柔性蒙皮曲面监测时FBG传感器中心波长漂移量与柔性蒙皮变形角度呈线性关系,且与被测点的位置有关系,在布置传感器时要考虑被测点的变形能够被FBG监测且未超出FBG的最大测量范围。
3)基于光纤光栅的柔性蒙皮曲面重构方法适用于变形机翼蒙皮的监测,但曲面重构算法还需要进一步优化,由于实验条件所限对于柔性蒙皮的重构精度还需进一步提高。