高空管线遥控探伤施工技术研究
2018-09-22郝冠男张元蛟
郝冠男,张元蛟
(中建安装工程有限公司,江苏 南京 210023)
0 引言
探伤作业作为焊接质量的直接把关,其工作要求不断提高。为了更好地利用空间,大部分管廊工程会选择铺设多层管线,这样就存在大量高空管线的焊缝探伤作业,而管道探伤一般为X射线探伤,具有X射线辐射危险性,在射线机工作期间,作业人员必须远离射线机至少30 m。使用常规的高空管线探伤施工技术,作业人员需频繁地攀爬脚手架、搬运探伤设备上下高空、将辅助爬梯移位;再者,探伤作业一般在夜间进行,受夜间视线受限、管道表面凝结露水以及探伤设备过重的影响,作业人员上下高空存在较大的危险。
本文详细介绍了高空管线遥控探伤施工技术,采用该技术进行高空管线探伤作业,作业人员不需要上下搬运探伤设备,极大提高了高空管线探伤的工作效率,最大程度保证了作业人员的安全。
1 工程概况
由本公司总承包的海南省洋浦港油品码头及配套储运设施工程项目,位于洋浦经济开发区神头港区,是海南省重点建设项目,主要建设30万t级原油泊位和5万t吨级成品油泊位各1个。从水陆分界点至泊位的管道共计4 km长,管廊分为4层共11根管道,顶层管道距离地面高达7.5 m,高空管线探伤作业的工程量非常大,再者整个工程工期紧,留给探伤作业的时间不充裕。其中有一根“24”成品油管道属于单根管线,旁边没有其他支撑点,此管线探伤的难度很大。
2 工艺原理
选用厚度10 mm的钢板制作成弧度为270°的环状导轨,导轨宽度根据磁力行车的尺寸制作,环形导轨的下方设有若干组定向滑动轮,分为主动轮和从动轮,主动轮上设有电机提供导轨前进的动力,从动轮为弹簧结构克服装配误差。环形导轨的下方还设有与环形导轨相适配的电磁铁,保证磁力行车在沿导轨移动时导轨不会转动,具体结构如图1所示。

图1 环形导轨结构示意
将探伤设备固定在磁力小车上,磁力小车可以沿着环形导轨行走,由于磁力小车为磁力轮结构,其吸附力能够保证磁力小车沿圆周方向转动而不会因自身重力而掉下地面。磁力小车与环形导轨组成探伤辅助推车。
在需要探伤的高空管线端头处搭设脚手架平台,作业人员到达平台上将辅助推车安装在待检测管线上,再将探伤设备固定在磁力小车上,检查各个连接是否牢固后手动推动辅助推车滑行一段距离,确保辅助推车的重心在运行时不会发生偏离。
作业人员回到路面上,在路面上手持辅助推车的遥控装置控制环形导轨前进,行进至待检测焊缝处后,通过辅助推车的遥控装置给环形导轨上的电磁铁通电,环形导轨牢牢吸附在管道上。再操作磁力小车使其行走到需要检测的焊缝段。接通探伤设备的电源,完成曝光准备后通过探伤设备的遥控进行延时曝光。曝光完毕后操作磁力小车回到环形导轨正上方,断开环形导轨的电磁铁供电。继续控制辅助推车前进到达下一个待测焊缝,重复以上步骤。
3 施工工艺流程及操作要点
3.1 施工工艺流程
施工准备→环形导轨的制作→主动轮电机的选型→磁力小车的选型→环形导轨的安装→辅助推车在管线上行走→探伤设备通电曝光。
3.2 操作要点
3.2.1 环形导轨的制作
由于环形导轨的缺口部分比探伤的管径直径小,所以在制作时将导轨分成两半制作,两半导轨相连接端均设有一带连接孔的角钢,两角钢通过螺栓相互固定,使得两半导轨固定连接。
环形导轨的重心需要让其固定在管线重心上方,为使导轨能够沿着管线轴向方向移动而不产生圆周方向转动,通过分析环形导轨的力学性能,在导轨内侧安放4对轮子,上方是一个主动轮和一个从动轮,下方是两个从动轮,每个轮子跟竖直方向成45°,如图2所示。
为了克服装配误差导致轮子与管线的不充分接触及辅助推车通过焊缝位置产生的震动,在从动轮上安装弹簧辅助结构,如图3所示,通过调节弹簧压紧螺栓调节压紧力,控制主动轮正压力,使导轨沿轴线方向的运动更流畅。

图2 导轨内轮子安放示意
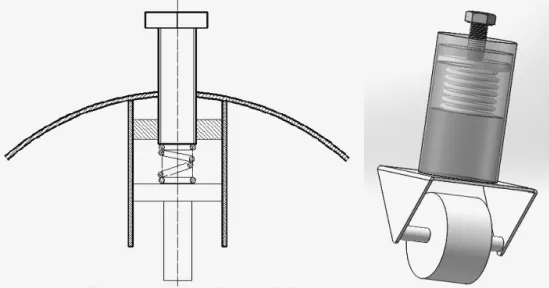
图3 从动轮-弹簧结构示意
所有轮子采用Ф40 mm的不锈钢轮,加上有40 mm长的弹簧和10 mm厚的压块,探伤管线为DN600的管线,管道外径为610 mm,所以环形导轨外框直径为 610+40×2+40×2+10×2=790 mm。
由于磁力小车沿环形导轨的行走运动和环形导轨沿着管线水平运动是分开的,所以在磁力小车行走时需要保证导轨是固定不动的。
为了达到这个要求,考虑在环形导轨内侧、四个轮子的中间安装4个电磁铁,如图4所示。在磁力小车沿环形导轨行走时,给电磁铁通电,让电磁铁吸住管道进行固定;在环形导轨需要行走的时候断开电磁铁的电,使电磁铁松开管道。
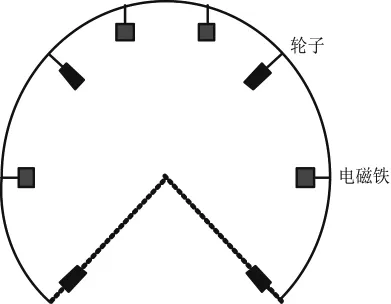
图4 导轨内侧电磁铁安放示意
对安放的电磁铁进行受力分析:
分析可知,小车反作用于导轨上的最大旋转力矩为:
导轨轮摩擦阻力矩:

因此所需要的滑轨轮-管道摩擦力大于等于156.7 N·m;基于此,为了防止导轨在小车运行时同时旋转,可以采用171.3 N吸附力的电磁铁,选择Φ40 mm圆柱状的电磁铁。
3.2.2 主动轮电机的选型
环形导轨在管线上行走,必须给主动轮提供动力,所以在主动轮上设有电机,电机可通过控制线控制电机的运转情况,电机选型通过对环形导轨进行如下水平运动受力分析。
(1)质量和尺寸。环形导轨外框直径为790 mm。磁力小车自重20 kg,探伤设备质量约20 kg,环形导轨的质量约20 kg,其他配件质量约5 kg,故整体质量约65 kg。
(2)各轮受力分析。由于上方两个轮受重力原因必为压紧的状态,而下方轮仅起辅助行走作用,故整体重量有上方两个轮承担。
故主动轮的正压力为:

(3)驱动力分析。主动轮的驱动力最终是由车轮的静摩擦力形式提供,从动轮有摩擦阻力,但都是以滚动摩擦形式提供。因此需满足的条件为:
①驱动力最大值小于最大静摩擦力,以防止打滑;
②驱动力矩大于其余3个轮的滚动摩擦阻力。
(4)计算
主动轮的最大静摩擦力矩:

针对不锈钢-碳钢接触,取μ静=0.3,

从动轮的滚动摩阻力偶矩:

针对不锈钢-碳钢接触,取δ=0.5 mm,

所以电机驱动力矩应满足以下条件:

即所需电机额定力矩 2.3~270 kg·cm。
通过计算选型以及综合分析后,选择电压为DC 6 V、功率为30 W、额定力矩为6 kg·cm的电机,该电机自带减速箱,能够选择比较慢的前进速度,符合探伤作业的要求。
3.2.3 磁力小车的选型
磁力小车承担带动探伤设备沿着环形导轨行走的任务,自身提供的动力需克服自重和探伤设备的重力以及与环形导轨之间的摩擦力。磁力小车直接采用成品商品,为工地上最常见的磁力管道切割机。其本身自带磁性轮,吸附力为100 kg。
该选型下对磁力小车进行受力及驱动力分析:(1)小车行走受力分析(图 5)

图5 小车受力示意
图5小车与中心连线跟竖直方向成θ角度。小车从右边往左边走时,主动轮受滑动摩擦力,方向垂直于导轨中心与小车中心连线向下;从动轮受滚动摩擦力,方向垂直于与连线向下。由小车的内部结构可知,有两个主动轮和两个从动轮。
定义小车跟中心的连线与水平线的夹角θ按逆时针转为正值,定义F滑沿图示方向时为正值。将小车简化成质点,画出受力分析图6。

图6 小车受力分析
小车吸附力为F吸=100 kg,假设小车跟导轨的材料都是碳钢,则取滚动摩阻系数。则单个从动轮的最大滚动摩阻力偶矩为Mmax=δN,N为单个轮的正压力。小车最后一级由蜗轮蜗杆传动,蜗轮分度圆直径d=mZ2=1×52=52 mm,将滚动摩阻力偶矩换算成阻力,则单个从动轮的滚动摩擦阻力为f滚=Mmax/d。
将重力mg分解到如图6所示的N和f滚方向,两个垂直的方向分别受力平衡。


则驱动力的最大值在θ=0.27°时候取到,为396.7 N。
(2)小车驱动力分析
查阅磁力小车自带的产品说明书得知磁力小车的传动机构如图7所示。
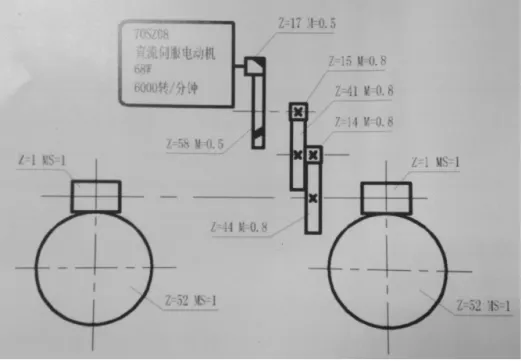
图7 小车传动机构
查阅设计手册,可得齿轮副的效率大约为97%,而蜗轮蜗杆副的效率约为70%,则电机的功率经过三级齿轮副和一组蜗轮蜗杆副传递到蜗轮,单个蜗轮的输出功率为:

经过三组齿轮副和一组蜗轮蜗杆副的减速,输出到蜗杆的转速为:

则一根蜗杆的输出转矩为:

则单个主动轮可以输出的最大驱动力为:

磁力小车在总载重40 kg情况下,两个主动轮所需的最大驱动力为396.7 N,所选小车单个主动轮能提供1 011 N的驱动力,故能够满足磁力小车在环形导轨上运行的驱动要求。
3.2.4 环形导轨的安装
在需要探伤的管线一端搭设脚手架平台,作业人员将环形导轨、探伤设备搬运至管线上,通过连接处的螺栓将两片导轨锁紧安装在管线上,调节螺栓的松紧程度保证环形导轨的轮子与管线接触。
将探伤设备固定在磁力小车上,再把磁力小车安放在环形导轨正上方,形成一个整体。磁力小车在安放前需检查环形导轨上是否有油污或者杂质,再检查磁力小车的磁性导轮上是否吸有铁屑等其他杂质,若有杂质一定要先将其清理干净。随后将磁力小车轻轻放到导轨上,先将一组磁性导轮与导轨接触,再将另一组磁性导轮缓慢放下,待两组磁性滚轮与导轨都接触到时,用力摇摆磁力小车几次,保证磁力小车与导轨全部吸牢。
检查各个连接处是否牢固,作业人员手动推动辅助推车滑行一段距离,查看各个部分重心均无明显偏移后接通电源,分别让环形导轨、磁力小车试运行一遍,均无明显偏移后即可进行下一步工作。
3.2.5 辅助推车在管线上行走
作业人员在路面上手持辅助推车的遥控装置控制环形导轨缓慢前进,作业人员跟随辅助推车共同行进至待检测焊缝处后,停止环形导轨的电机供电。然后通过遥控装置给环形导轨上的电磁铁通电,环形导轨将牢牢吸附在管道上。由于后续探伤作业采用双壁单影外透法,遥控操作磁力小车使其行走到预先布好片的检测区域正对面,即保证放射源与胶片连成一条穿过管线中心的直线。磁力小车行走的位置示意见图8。
3.2.6 探伤设备通电曝光
探伤设备在使用前训机完毕,在检查电源电缆无损坏、接地无误后接通探伤设备电源,电源灯亮、冷却风机旋转,如若不正常立即切断电源。通过探伤设备的遥控设置好管电压、时间、延时等参数后,启动延时曝光,作业人员撤离到安全区域。曝光完毕后,探伤设备自动切断高压电源,作业人员关闭探伤设备电源开关并拔下电缆,操作磁力小车回到环形导轨正上方位置,然后断开环形导轨的电磁铁供电,继续控制辅助推车前进到达下一个待测焊缝。
4 结语
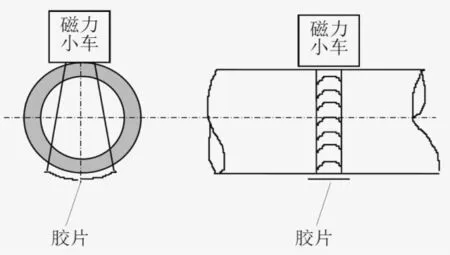
图8 磁力小车行走位置示意
高空管线遥控探伤施工技术在本工程的投入使用,不但解决了高空管线探伤作业施工难度大、工作效率低、安全风险高的难题,而且满足了高空管线探伤的质量要求及进度要求,获得到了业主和监理对公司技术水平的高度认可。
高空管线遥控探伤施工技术适用于存在大量高空管线,并且对管线探伤比例有一定要求的工程。相对传统的施工技术,高空管线遥控探伤施工技术有着明显的社会效益和经济效益。工业的快速发展将会有越来越多的高空管线,本技术的有效实施,将为同类施工起到较强的示范作用,通过更多的实践及完善,可以应用到更广泛的施工领域。
