一种特殊W-W型的2K-H差动轮系的应用探究*
2015-08-21丁渭渭王振鹏
丁渭渭,王振鹏,刘 航,李 耀,赵 悟
(长安大学道路施工技术与装备教育部重点实验室,陕西 西安 710064)
0 引言
2K-H型差动轮系在传动中容易实现运动和力的合成与分解,所以在各种工程机械、车辆、航天发动机等实际工程应用中多采用以2K-H型差动轮系为基础构造的混合轮系结构。在2K-H型差动轮系传动中分两种情况:一种是由两个基本构件输入,另一个基本构件作为输出;另一种是由一个基本构件输入,另两个基本构件作为输出。笔者以两个中心轮作为输入基本构件,行星架作为输出基本构件的特殊W-W型2K-H差动轮系为例,对2K-H型差动轮系在工程应用中需要考虑输入转速敏感度、传动效率等因素进行理论分析,以得出较为合理的应用条件。
1 W-W型的2K-H型差动轮系概述
工程上广泛应用的2K-H型差动轮系,通常为一种在运动学上具有两个自由度的机构,通过一系列的齿轮啮合传动,能够方便简单的达到动力分解与合成的目的。2K-H型差动轮系与一般的齿轮传动相比具有传动效率高、体积小、传动比大以及能够方便实现动力分解与合成等优点。随着社会经济的快速发展,工程中对2K-H型差动轮系的需求越来越广泛,故对2K-H型差动轮系进行探索研究具有很高的实际意义。
根据齿轮啮合配置房子进行分类,可将2K-H型差动轮系分为N-G-W、N-N、W-W、N-W等几种类型[1]。笔者主要以W-W型差动轮系中的以两个中心轮作为输入基本构件的特殊差动轮系作为研究对象,分析该机构的应用要求。该特殊差动轮系的原理图如图1所示,1、3两个中心轮作为输入动力的基本构件,并且可由一个动力源提供动力;行星架H作为动力输出的基本构件;行星轮2-2’为一双联齿轮。
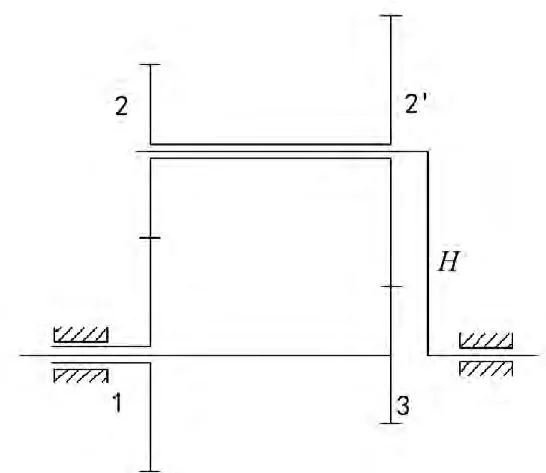
图1 特殊差动轮系原理图
研究的特殊差动轮系具有结构紧凑简单,动力源可减少,传动比范围较大,且不受齿圈加工困难的影响等优点。故探究该特殊差动轮系的应用条件及范围,对工程中应用该特殊差动轮系有理论指导意义。
2 特殊差动轮系的运动学关系
2.1 特殊差动轮系运动学关系
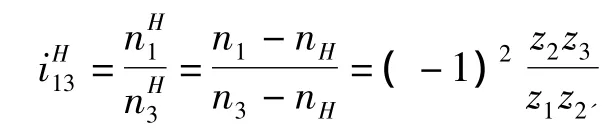
如图1差动轮系结构原理简图所示,差动轮系具有1,3两个输入基本构件和H一个输出基本构件并拥有2个自由度,通过对该特殊差动轮系的机构转化可以直观地分析其运动学和动力学关系。该特殊差动轮系利用转化机构法可以得到如下运动学关系式:

据此可看出差动轮系具有六个转化机构的传动比,并且六个传动比存在一定的关系,而不是完全独立的,根据传动比的概念,有

2.2 特殊差动轮系两输入转速的要求
由该特殊的差动轮系结构原理图可得出两中心轮与双联齿轮的中心距一致,即

得出m2'3/m12=(z1+z2)/(z2'+z3);且双联行星轮的转速一致n2=n2'。
当系杆H与中心轮1转向一致,即n1与nH符号相同时,该差动轮系为正号机构,反之则为负号机构。无论哪种机构都有以下关系:
当系杆的转速为0时,即行星轮只自转不公转时的中心轮3的临界转速为

该特殊差动轮系的一大特点在于:两中心轮的输入动力来可源于一个动力源,也可分别来源于独立的动力源,但是两个中心轮的输入转速必须得到严格的控制。如果动力源是靠皮带或者齿轮传递到两个中心轮的,就避免不了由于皮带打滑或者齿轮选择不到恰好的齿数甚至由于动力源启动时的输出不稳定性而引起输出转速的不确定性。故在选择两中心轮的转速时必须要保证严格的输入转速,即使不能在完全意义上避免输入转速的误差,也要尽量将这种误差对系杆输出转速的不确定性的影响减小。
下面以两个实际方案来对比讨论各种因素对输出转速的影响:
方案1:一W-W型2K-H差动轮系的系杆输出转速为30 r/min,电机输入转速为1400 r/min;设定 z1=30,z2=20,z3=20,z2'=20。
由以上分析可得方案1的中心轮3的实际输入转速在当系杆的转速为0时的中心轮3的临界转速上下15 r/min位置时,系杆输出转速为要求的30 r/min。此时如果中心轮3输入转速变化为1 r/min时,对系杆的输出转速影响为:
即 n1=1400 r/min,n3=2084/2116 r/min 时,此时系杆H的输出转速为:

带入数值得nH=32 r/min,即中心轮3的输入转速改变1 r/min就会影响系杆输出的2 r/min,即2倍关系。可推出中心轮3的实际转速与临界转速的差值与系杆要求输出转速的比例就是,中心轮3输入转速改变量对系杆输出转数的影响系数为30/15=2。
由于两输入轴是可由同一个动力源通过同步带进行传递动力,当动力源输出转速变化1 r/min时,对系杆输出转速的影响如下:
即此时的 n1=1399 r/min,n3=2085/1400×1399=2083.51 r/min时,此时系杆H的输出转速为:

带入数值得nH=29.98 r/min,即电机的输入转速改变1 r/min就会影响系杆输出的0.02 r/min。在此基础上把电机输入转速改变为1390 r/min,计算的nH=29.7857 r/min。可得出电机转速的改变对系杆输出转速影响很小。
方案2:一W-W型2K-H差动轮系的系杆输出转速为35 r/min,电机输入转速为1400 r/min;设定 z1=54,z2=41,z3=23,z2'=34。
由以上分析可得方案2中心轮3的实际输入转速在当系杆的转速为0时的中心轮3的临界转速上下3.8245 r/min位置时,系杆输出转速为要求的35 r/min。此时如果中心轮3输入转速浮动1 r/min时,对系杆的输出转速影响为:
即 n1=1400 r/min,n3=1252.16/1242.53 r/min时,此时系杆H的输出转速为:

带入数值得nH=44.1516 r/min,即中心轮3的输入转速改变1 r/min就会影响系杆输出的9.1516 r/min,即 35/3.8245=9.1515。可推出中心轮 3 的实际转速与临界转速的差值与系杆要求输出转速的比例就是,中心轮3输入转速改变量对系杆输出转数的影响系数为 35/3.8245=9.1515。
同样改变电机转速计算出的结果显示,得出电机转速的改变对系杆输出转速影响很小。
综上所述,由于传动比不能保证是整数,同步带传动或齿轮传动不能达到中心轮转速的精确输入,故选择i13的传动比时要选择较大的值,这样才会减小由于同步带或者齿轮传动带来的中心轮输入转速误差对系杆输出转速的影响。在该特殊差动轮系由同一个动力源提供动力时,电机在工作时转速的稍微变化对系杆的输出转速的影响很小。
3 特殊差动轮系的力学关系及传动效率
3.1 特殊差动轮系的力学关系
在摩擦损失忽略不计时,如图2所示,该特殊差动轮系1,3和H三个基本构件上的转矩关系应具有以下力能关系:

式中:T1、T3、TH是作用在基本构件1,3,H上的外转矩;n1、n3、nH为基本构件1,3,H 的转速。

图2 差动轮系结构图
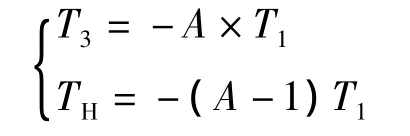
据上式可分析得出该特殊差动轮系传动中各基本构件之间有以下扭矩关系式:

由上式得,当A一定时,各基本构件转矩之间有一种确定的比例关系,并且整个系统的运动对这种比例关系没有影响;而且,只要系统中有一个构件具有确定的转矩的大小和方向,那么就可以确定另外两个构件上的转矩的大小和方向,外界的条件对此没有影响。该特殊差动轮系具有两个运动自由度,但是三个基本构件的转矩关系是单自变量的。除此之外,该特殊差动轮系的三个基本构件上所受转矩的大小具有一种内在联系,当外界施加转矩在这三个基本构件时,在理想状况下,只有当转矩的大小满足一定的比例关系时,该特殊差动轮系才能正常工作。
通过以上分析还可看出,该特殊差动轮系的三个基本构件上所受到的转矩必须有两个基本构件方向相同而与第三个基本构件相反,并且方向相同的两个转矩既可作为汇流转矩,又以作为分流转矩。该个性质在该特殊差动轮系使用时很重要。
综上所述,该特殊差动轮系可以有一个或两个成比例关系的转矩输入构件,但一定要有两个运动输入构件。因此要实现功率的分(汇)流,就必须安排合理的转速关系使它能够与转矩关系相对应[3]。
3.2 特殊差动轮系的传动比适用范围
通过对该特殊差动轮系的两个中心轮1、3依次视为固定构件,即取ω1=0或ω3=0,将该特殊差动轮系传动分解为两个简单的行星传动。县分别对这两种简单的行星传动进行传动效率计算,最后再按将这两个行星传动并联计算该特殊差动轮系的传动效率[4-6]。即在中心轮1和中心轮3作为两个输入基本构件,系杆H作为输出构件时,这种特殊的W-W型2K-H差动轮系的传动效率为:
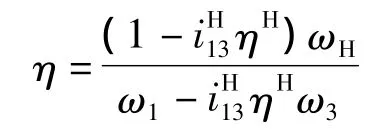
式中:ηH为转化机构的效率。
由以上该特殊差动轮系的传动效率公式可得,当差动轮系的传动比i1H、i3H取值较大时转化机构的效率ηH就会比较小。由于差动轮系转化机构的效率和传动比成反比,故在对该特殊差动轮系进行应用时需要考虑传动比不宜过大。
例如方案1所示的例子,即使在转化效率取值为ηH=0.99时,带入上式可得整个差动轮系的传动效率η=0.4278,可得出整个传动效率也是相当低的。
4 结论
(1)以两个中心轮作为输入基本构件的特殊W-W型2K-H差动轮系具有一个非常重要的结构系数A,它是影响差动轮系的运动和力学特性的重要参数。一旦差动轮系系统的结构一定,就可以得到确定的A值,这样其他五个传动比也就相应确定了。
(2)对于本文研究的特殊差动轮系应用时,为减小外界因素对传动的精确性的影响,在选择两个中心轮输入转速时选择较大的的i13。当两个动力来源于同一个动力源时,动力源转速输入的波动对该特殊差动轮系的输出转速的影响很小,故不用过多考虑动力源输入的波动影响。
(3)在应用该特殊差动轮系时,选择的总传动比i1H、i3H不宜过大,否则整个系统的传动效率很低。
[1]胡来瑢.行星传动设计与计算[M].北京:煤炭工业出版社,1996.
[2]孙振中.并联HEV用差动轮系特性分析与实验研究[D].西安:西安理工大学,2010.
[3]于 洋,唐进元,卢延峰.一种封闭式差动轮系传动比及力矩分析[J].机械传动,2008,32(2):30 -31.
[4]刘春荣.2K-H型差动轮系效率的简便计算[J].机械,1997,24(6):31-32.
[5]韩继光,董广强.差动轮系自锁条件的研究[J].徐州师范大学学报(自然科学版),2003,21(6):26 -28.
[6]王 成,方宗德.2K-H型差动轮系传动效率简化计算的研究[J].北京联合大学学报(自然科学版),2007,21(6):23 -26.
