基于自然驾驶数据的变道切入行为分析
2018-09-11王雪松杨敏明
王雪松, 杨敏明
(同济大学 道路与交通工程教育部重点实验室, 上海 201804)
车辆变换车道是驾驶过程中尤为常见的基本操作,交通流状况在很大程度上受到车辆变道行为的影响.既有研究已证实,车辆变道容易造成交通阻塞和交通冲突,甚至引发交通事故.2015年我国因违法变更车道、违法超车与汇入等不良驾驶行为造成的事故占事故总量的4.9%[1].美国每年有24万~61万起交通事故的直接致因为不当的车辆变道和汇入行为,占机动车事故数的6%[2].
变道切入是指后随车在正常行驶过程中,相邻车道前车变换至其所在车道的变道行为.与变道定义略有区别,变道切入要求目标车道必须有后随车,而一般的变道对此并无要求.频繁和紧急的变道切入行为会对交通流产生负面影响,主要表现在造成道路通行能力下降、交通瓶颈、车流“时停时走”,甚至引发交通事故.随着新技术的发展,变道切入行为也将对高级驾驶辅助系统(advanced driver assistance systems, ADAS)与自动驾驶车辆的安全运行产生不利影响[3-4].自动驾驶汽车厂商在实现量产之前,需要分析不同复杂场景下的变道切入行为,保证车辆运行的绝对平稳与安全[5].
自1986年Gipps[6]提出第一个变道模型以来,不少发达国家的学者在变道行为特征与模型等方面开展了深度研究[7-8],这些成果被广泛应用于交通安全分析、交通仿真、驾驶模拟以及车辆安全技术等诸多方面.由于缺乏有效的数据采集技术,目前中国的交通仿真模型大多基于西方发达国家的试验结果,这与我国非机动车、行人交通复杂,驾驶员驾驶风格激进,以及车辆频繁抢道变道等实际情况是不相适应的[9].因此,研究我国真实环境的驾驶行为,对于提升交通仿真技术的有效性和鲁棒性具有重要意义.
自然驾驶研究(NDS)是指自然状态下(即无干扰、无实验人员出现、日常驾驶状态下)利用高精度数据采集系统观测、记录驾驶员真实驾驶过程的研究[10].因其采集的数据全面、真实、可靠,样本代表性广泛,非常适合于驾驶行为特征分析和模型标定与验证.“上海自然驾驶研究”是我国首个自然驾驶项目,开始于2012年12月,结束于2015年12月,历时3年,共采集60位驾驶员近161 055 km的驾驶数据.该研究基于上海自然驾驶数据(SH-NDS),通过建立变道切入行为自动化提取标准,从变道切入目的和转向灯使用,持续时间和危险程度,以及后随车反应等方面系统分析中国驾驶员的变道切入准备、实施、影响3个层面的行为特征,力求深化我国变道理论及其应用的相关研究.
1 研究综述
既有研究普遍关注一般变道的基本特征.在变道之前,Gipps[6]认为驾驶员需要分析变道的可能性和必要性.Yang和Koutsopoulos[11]根据不同变道目的将其分为强制性变道和自由性变道.前者常出现在当前车道终止、阻塞,进出交叉口区域,进出匝道,以及规避障碍物、车道禁行等情况;后者常出现在前方有低速车辆或大型车辆、路侧有公交车辆和慢行交通,以及车辆自主变换至快车道或慢车道等情况.
使用转向灯是变道行为的重要特征,后随车通常根据转向灯辨别前车变道意图.在变道之前,合理地使用转向灯,能够有效提高交通效率和防止碰撞事故[12].Ponziani[12]和Olsen[13]研究发现,变道过程因未使用转向灯造成的事故比例高于驾驶分心.世界上大多数国家对驾驶过程中的转向灯使用均有明确规定,转向灯使用率成为判别国家和地区驾驶风格的重要依据[14].
持续时间是变道实施过程的关键特征.持续时间是指相邻车道前车从原车道开始偏移至完全稳定于目标车道所经历的时间长度.这一特征对驾驶模拟的输出有显著影响,如变道车的加速行为以及后随车的反应等[15].既有研究表明,一般的变道持续时间多在1~16 s之间[15-16].
碰撞时间(time-to-collision, TTC)也是变道过程的重要特征之一,常被用于评估ADAS的性能.碰撞时间等于前后两车的间距除以相对速度.由于变道行为容易引发追尾、侧碰事故,因而碰撞时间成为判别变道行为危险程度的重要指标.Olsen[13]根据碰撞时间将变道划分为四个危险级别,即不紧急,紧急,紧迫以及濒临事故等四个紧急程度.Talmadge[17]认为碰撞时间可以用于避撞系统的预警触发,在危险变道情况下向后随车驾驶员发出警报.
变道行为不可避免地对目标车道后随车的驾驶行为产生影响[18].Zheng等[19]提出,变道容易使得后随车从正常行驶的平衡态转变为速度波动的非平衡状态,而后又从非平衡状态过渡到新的平衡态.Cassidy等[20]证实在交通拥挤的上游路段,当车辆变道至快车道的比例超过一定阈值时,就会造成下游路段交通不稳以及通行能力下降.Laval和Daganzo[21]认为这种通行能力下降是由于变道车辆的有界加速度使得后随车反复制动产生跟车空隙,从而造成“时停时走”现象以及交通流振荡.这个结论和Zheng等[19]的研究具有一致性.
综上所述,既有研究缺乏专门针对变道切入行为全面系统的梳理.更进一步来说,既有的变道行为结论大多基于发达国家的研究,其结论并不一定适用于中国驾驶环境,而中国道路交通环境复杂,驾驶员的驾驶风格迥异,可能致使某些研究结论存在偏差.由于变道切入相比于一般变道更具有典型意义,其对交通流的影响也更为显著,因此迫切需要使用有效数据开展深入研究.本文基于上海自然驾驶数据对变道切入特征进行分析,能够丰富国内驾驶行为和交通流理论研究,保证研究成果的真实可靠.对变道切入行为的分析结论,在一定程度上也能反映驾驶员驾驶风格,从而针对不安全的驾驶风格进行安全教育与干预纠正;同时,相关分析结论可以为研究所在地ADAS和自动驾驶的开发与应用提供重要的参考依据.因此,变道切入行为研究具有广泛的应用价值.
2 数据准备
2.1 数据采集系统
研究数据来自“上海自然驾驶研究”项目,该项目由同济大学、通用汽车公司、弗吉尼亚理工大学三方合作开展,旨在了解中国驾驶员的车辆使用、操纵及安全意识.5辆测试车安装了先进的SHRP2 NextGen数据采集系统,包含车辆总线数据接口、三轴加速度计、可跟踪8个目标的雷达系统、温度及湿度传感器、GPS定位系统和4路摄像头.数据采集系统的不同设备设置了不同的采样频率,分布在10~50 Hz之间[22].数据采集系统在车辆点火后自动启动、熄火后自动关闭,全时记录实际驾驶过程中驾驶员的驾驶行为、车辆运行状况等数据.经过处理,所有采集得到的信息将以CSV文件和视频方式保留.
2.2 变道切入行为自动化提取
研究中,自然驾驶测试车始终以后随车的视角再现相邻车道前车的变道切入行为.如图1所示,自然驾驶测试车作为后随车,其雷达系统记录变道切入车的位置和速度信息.位置信息通过两个变量确定:纵向间距和横向间距,前者指后随车(即测试车)和变道切入车的纵向距离,后者指测试车和变道切入车的横向距离(左为正,右为负).类似地,速度信息可由测试车和变道切入车横向、纵向的相对速度确定.
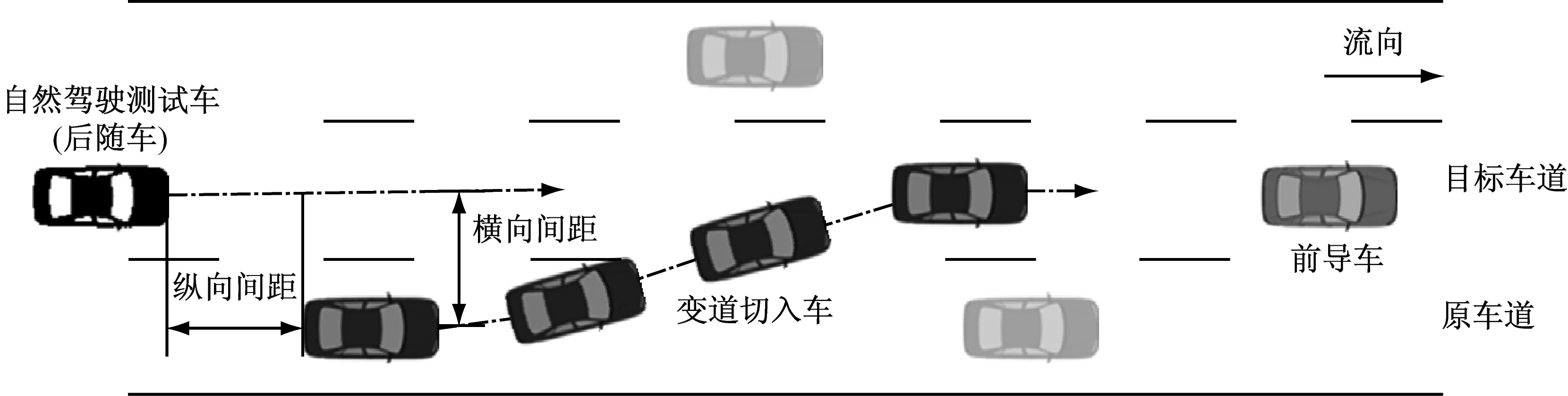
图1 变道切入行为场景及雷达目标信息
在进行变道切入行为自动化之前,需要确定变道切入过程中一些关键变量的阈值范围.从自然驾驶数据库中人工筛选300个变道切入片段,结合前向视频、雷达以及车辆总线数据,分析各项参数的分布范围,最终设定自动化提取算法的准则如下:
(1) 横向间距阈值.在变道切入车开始变道前,其与测试车的横向间距 > 2.2 m;在变道切入车完成变道后,其与测试车的横向间距 < 1.2 m.该准则保证变道切入车横跨车道完成切入行为.
(2) 纵向间距阈值.变道切入车与测试车的纵向间距不宜大于120 m,否则变道切入将无法影响测试车的驾驶行为.该准则保证变道切入行为的影响具有实际意义.
(3) 速度阈值.变道切入车和测试车在片段全过程中,纵向速度均大于 1 m·s-1.该准则保证前后两车始终处于运动状态.
利用上述准则自动化提取,与此同时,定义了3个关键时间点:起始时刻、越线时刻和终止时刻.图2是提取到的一个典型变道切入行为片段.
在变道切入车开始横向运动后,其与测试车的横向间距不断减小,定义横向间距(绝对值)不断减小前的最后一个局部最大值为变道切入起始时刻;当变道切入车不断靠近目标车道,某一时刻,其与测试车的横向间距(绝对值)等于测试车与车道边线距离,定义该时刻为变道切入越线时刻;当变道切入车成为雷达正前方目标后,定义两车横向距离(绝对值)等于0的第一个时刻为变道切入终止时刻.
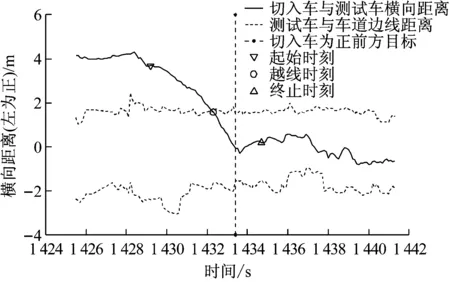
图2 变道切入过程横向距离变化及关键时刻
2.3 提取结果
经过视频验证,共计得到涉及51位驾驶员出行过程中的4 734个前车变道切入片段.51位驾驶员的年龄分布在23岁至51岁之间,平均驾龄7.2年,其中男性44人,女性7人.在进行视频验证的同时,记录各片段所在道路类型,变道切入目的以及变道切入车转向灯使用等基本信息.4 734个变道切入片段有926个在地面道路,1 219个在高速公路,2 589个在快速路.
3 变道切入行为特征分析
3.1 变道切入目的
沿用Yang和Koutsopoulos[11]变道行为的分类方法,将变道切入分为强制性和自由性两种.通过观察前向视频,强制性变道切入目的有:进出交叉口区域;进出匝道;规避施工区或障碍物等.自由性变道切入目的有:规避原车道前方慢车;变换切入至快/慢车道;无明显意图等.根据不同道路类型,判别驾驶员实施变道切入的根本动机,统计以上两类6种变道切入目的如表1所示.
对于3类道路,原车道前方车辆速度慢是变道切入车变换车道最主要的原因,综合占比达到50.9%,高于Olsen[13]针对一般变道的研究结果.在其研究中,州际公路和高速公路上因前方慢车导致的变道占所有变道数目的比重最大,达37.24%.对此结果合理的解释是:原车道前方车速度低于变道切入车,使得其行驶受阻或跟车过近,诱发变道切入车驾驶员实施变道切入至测试车所在车道,从而规避前方慢车,并获得速度和空间优势.
由于地面道路存在平面交叉口,车辆在选择对应的进口道和出口道时,常发生变道切入行为.尤其是当驾驶员意识到车辆处于错误的进口道时,更容易发生切入抢道行为.因进出匝道而导致的变道切入最常出现在快速路,而车辆自主变换切入至快/慢车道最常出现在高速公路,这与道路实际情况相符.令人比较意外的是,各类道路均存在一定比例的无明显意图变道切入.考虑可能的原因是:当目标车道及原车道前方均无其他车辆时,变道切入车不受前导间距的限制,驾驶自由度显著增加,因而诱发部分驾驶员实施变道切入.此外,一些驾驶员驾驶风格较为激进,客观上也可能随意变道切入.
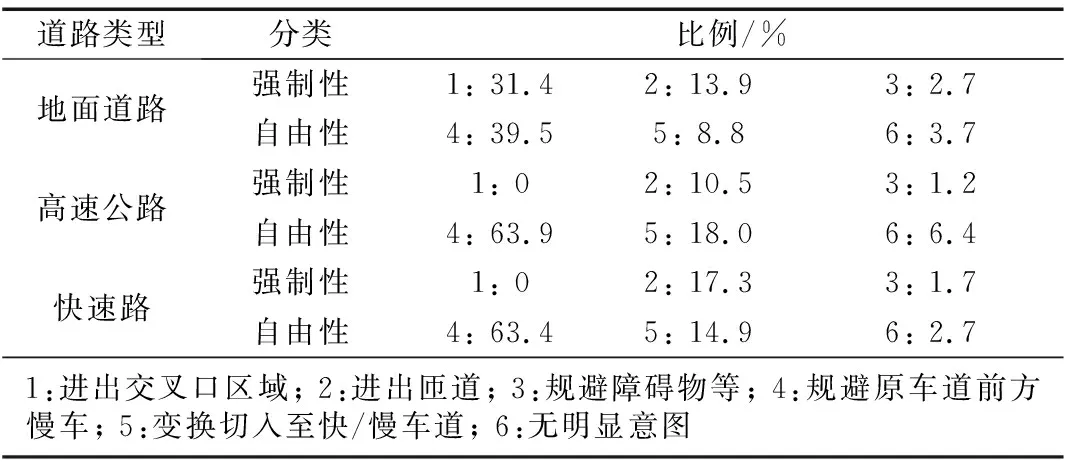
表1 不同道路类型变道切入目的比例
3.2 转向灯使用
车辆变道切入前须开启转向灯提示后随车.表2统计了不同道路类型变道切入车转向灯使用情况.可以看出,各类道路转向灯使用率均不高,总体的使用率仅为50.2%,而快速路转向灯使用率最低(45.5%),这表明有相当比例的驾驶员安全意识淡薄,也从侧面反映了驾驶员在实施变道切入操作普遍较为急促,对转向灯使用并不重视.
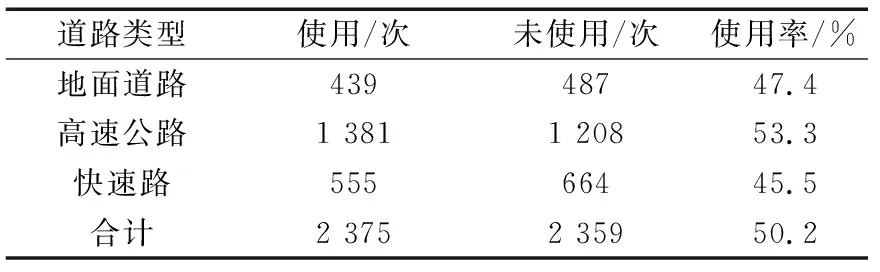
表2 不同道路类型转向灯使用比例
Olsen等[13]研究得到美国紧急情况变道转向灯使用率为53.3%,王建强等[23]研究得到中国高速公路一般变道的转向灯使用率为65.0%,均高于变道切入发生的转向灯使用率.归纳来说,驾驶员在变道切入未使用转向灯的原因有:忘记开启;短时间内不能及时开启;强制加塞而不开启等.
3.3 持续时间
变道切入持续时间定义为起始时刻到终止时刻所经历的时间长度.此定义与Toledo[15]关于一般变道持续时间的定义相似,其规定变道车横向运动开始时间点和结束时间点所经历时长为持续时间.依照该定义,图1中的持续时间约为5.7 s.
所有4 734个切入片段的持续时间最小值为0.7 s,最大值为12.3 s,均值3.82 s,方差2.28 s.对不同道路类型的切入持续时间进行差异性检验,结果表明差异不显著(P值为0.345 1).
变道切入持续时间的分布可以作为微观交通仿真的重要输入参数[15].选定8种可能的分布类型,包括指数分布、Gamma分布、正态分布、对数正态分布、Logistic分布、对数Logistic、拉普拉斯分布以及Pearson 5分布等,利用统计分析软件@RISK对变道切入持续时间分布类型进行研究,以赤池信息量准则(AIC)为拟合优度比选标准,AIC越小表示拟合效果越好.结果表明对数正态分布对变道切入持续时间的拟合效果最好,其分布如图3所示.这与Toledo[15]和Hetrick[16]关于一般变道持续时间的分布研究相一致.
对数正态分布的密度函数如下:
(1)
式中:μ为对数正态分布均值;σ为对数正态分布标准差,可由样本均值和样本方差求得,即
(2)
计算得到:μ= 1.174,σ= 0.517.Toledo[15]基于美国1 790个一般变道行为,得到样本均值为5.5 s,μ= 1.376,σ= 0.550,较本文的研究结果更大.这表明变道切入持续过程时间比一般变道更为短促,驾驶过程更为紧张.对此可能的解释是驾驶员在变道切入过程中,往往面临后随车迫近的压力,使得变道实施更为迅速.
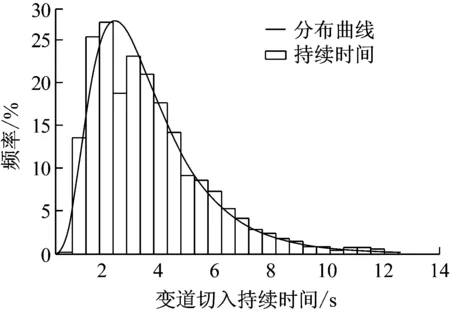
图3 变道切入持续时间分布(对数正态分布)
3.4 变道切入危险程度
TTC常被用于评估驾驶安全性,特别是对于追尾与侧碰场景.对于变道切入实施过程,碰撞时间是衡量其危险程度的重要指标.Olsen[13]基于碰撞时间,对3 228个一般变道片段(TTC为正)划分了4个危险级别:无危险(1级,TTC大于5.5 s);紧急(2级,TTC大于3 s,小于等于5 s);紧迫(3级,TTC大于1 s,小于等于3 s);濒临碰撞(4级,TTC小于等于1 s).由于TTC等于两车间距除以相对速度,而相对速度等于后随车速度减去变道切入车速度,因此正的TTC有实际意义.在全部4 734个变道切入片段中有2 008个TTC为正值.为了与Olsen的研究成果相对比,本文沿用其分级方法,计算变道切入行为片段平均TTC,得到不同道路类型条件下的危险程度分布.
如表3所示,79.4%的切入行为片段属于无危险级别.高速公路和快速路紧急和紧迫变道切入比例低于地面道路,表明地面道路的变道切入行为更为突然,危险程度更大.对此合理的解释是地面道路交通流混合且复杂,驾驶员因进入错误进口道、规避突然出现的行人或路面障碍物等均可能导致其采取紧急变道切入行为.与Olsen[13]的研究相比,变道切入行为在紧急、紧迫和濒临事故等危险程度上均比一般变道更具风险,对交通安全的不利影响也更为突出.
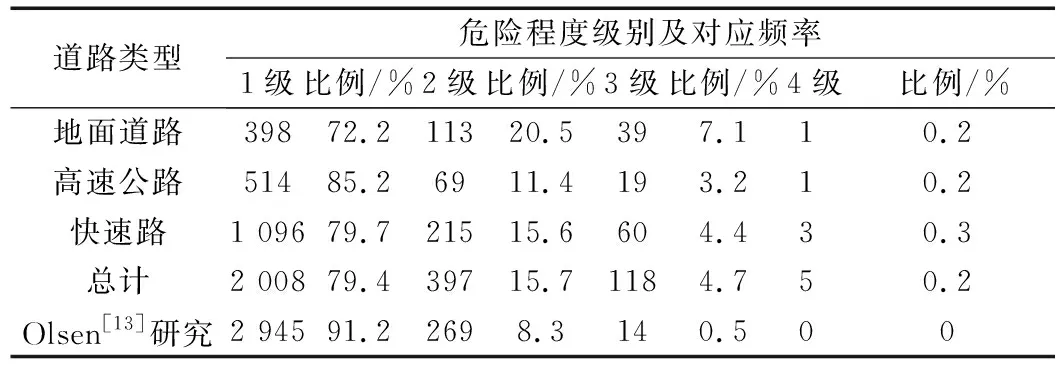
表3 不同道路类型变道切入危险级别分布
3.5 后随车反应
变道切入对后随车影响主要体现在迫使后随车减速让出空间.但在实际情况中,存在着相反的行为,即后随车驾驶员向前加速,迫使变道切入车无法正常插入.因此,后随车的速度变化是变道切入影响的直观体现.本文比较变道切入起始时刻和终止时刻(如2.2定义)自然驾驶试验车的速度差异,从而分析变道切入对后随车的影响.速度差异可以用速度变化百分比衡量,即始末时刻速度差值与起始速度的比值,如下:
(3)
式中:Pv为速度变化百分比;v1为试验车起始时刻速度;v2为试验车终止时刻速度.
一般认为测试车在前车变道切入前6 ~ 3 s属于正常行驶过程,计算该时间内测试车速度变化百分比得到正常速度波动范围.结果表明,90%的测试车速度变化百分比速度在5.2%以内.因此,测试车速度增降幅在5%以内可视为车辆速度的正常波动.统计不同道路类型速度变化百分比绝对值大于5%的变道切入行为片段,分析变道切入车辆对后方测试车的纵向速度影响,结果如表4和图4所示.
由表4及图4结果可知,不同道路驾驶员减速和加速的比例在7∶3左右.地面道路急加速或者急减速(|Pv| > 20%)比例大于高速公路和快速路;相反,地面道路速度变化百分比较小的比重小于高速公路和快速路.相比于高速公路、快速路,后随车在地面道路行驶时,更容易受到变道切入的影响,速度波动也较为明显.可能的原因是地面道路交通处于间断流状态,车速较低,因交叉口、路段出入口以及慢行交通等干扰,车辆变道切入行为往往比较激进,从而导致后随车反应更为剧烈.
虽然变道切入过程后随车减速是常态,但也不能忽视加速情形.在所有变道切入片段中,近15% 的后随车速度变化百分比超过10%,反映出一些测试车驾驶员在意识到前车有变道切入意图时并未采取谨慎的驾驶态度.这也从侧面说明部分中国驾驶员在驾驶过程中表现出的激进风格:一方面,对正常切入行为的“不礼让”;另一方面,对异常切入行为(违法变道和紧急加塞等)的“不容忍”.
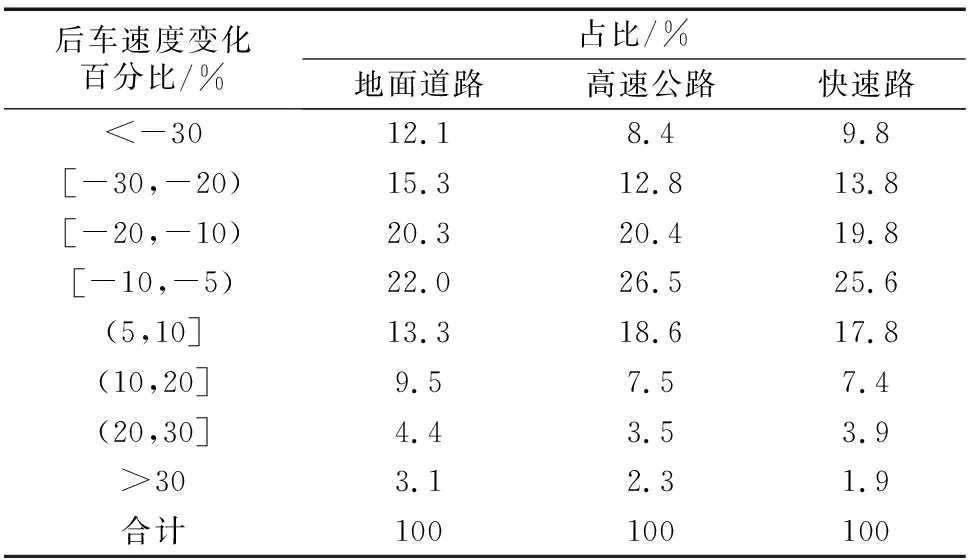
表4 变道切入车辆对后随车速度变化的影响分布
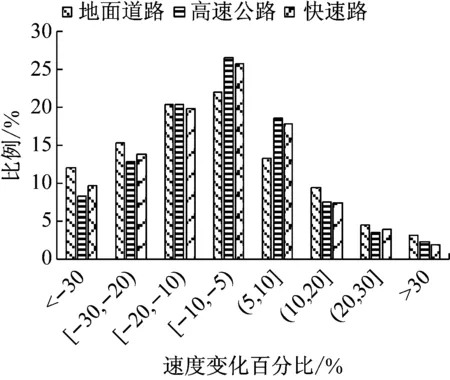
图4 不同道路类型后随车速度变化百分比差异对比
4 结语
基于自然驾驶采集的真实驾驶行为数据,提取4 734个变道切入行为片段,从变道切入准备、实施过程,以及对后随车的影响等方面解析中国驾驶员的变道切入行为.结果表明,规避原车道前方慢车是车辆采取切入行为最主要的原因,各种道路设施上均存在一定比例的无目的变道切入行为;中国驾驶员切入持续时间与转向灯使用比例均小于美国,表现出较为激进的驾驶风格;近15%的后随车驾驶员在前车变道切入时速度变化百分比超过10%,表现出明显的“不礼让”或“不容忍”.相比于高速公路和快速路,地面道路的切入行为对后随车的影响更大,其危险程度也更高.本文针对变道切入行为进行的特征分析在驾驶员驾驶风格划分与安全教育方面具有良好的应用价值.研究结果有利于深入理解车辆变道切入特征,为国内微观交通仿真、驾驶模拟以及自动驾驶研究提供一定的参考依据;同时,从中美对比角度分析变道切入行为,也将丰富国内微观驾驶行为和交通流理论研究.
