城市交通信号控制的新思路
——基于综合待行区的交通控制方法研究
2018-09-10付丰
付丰
(上海市市政规划设计研究院有限公司,上海市 200031)
0 引言
随着经济社会的飞速发展、城市化的不断扩张,机动车辆日益增加,交通拥堵已成为城市生活的通病,尤其是特大城市,交通供需不平衡这一矛盾更为突出。该次研究就是在此背景下提出。
国内外针对城市交通信号控制已经有了大量的研究。当前的城市交通信号控制模式中,都是基于交叉口只有一条停车线来进行交叉口交通渠化组织与交叉口交通信号控制。大多数研究侧重于基于交通信息预测的交通信号控制优化以及区域自适应交通信号控制优化。陆化普等人研究了实时自适应交通信号控制优化理论模型,其关键思路是把交通延误和停车次数综合为一个性能指标对路网交通信号进行整体优化;杨兆升等人研究了交通信号控制与交通诱导的智能协作,建立了控制与诱导协同控制模型;Ding Zhongjun研究了T形交叉口基于元胞自动机模型的交通信号控制方案;Li Zhipeng面向城市干线交叉口信号控制,基于旅行时间短时预测,提出了一种改进的自适应指数平滑模型;Md.Shabiu Islam等人通过建立交通模糊逻辑规则,基于交叉口动态交通流进行信号配时优化设计;Zheng Xing等人对交叉口实时自适应控制系统的控制模型及控制算法进行了研究。
基于此,本文对基于设置双停车线的交叉口综合待行区的交通信号控制方法进行了研究,重点论述了该方法实施的理论基础、双停车线设置原则和双停车线交通信号控制策略,通过交通仿真模拟实验的运行数据,结果表明该方法对改善交叉口通行能力具有显著的作用。
1 相关定义
基于综合待行区的交通控制是指在一个城市交叉口的各个进口方向上,在原有的停车线后面加设一条停车线,使红灯期间等待放行的车辆分别排在前后两个排队区域内,停在第一停车区的车辆在绿灯放行时,能够充分利用交叉口和此间路段的通行空间,最大效率地利用有效绿灯时间,提高交叉口的通行能力。“基于综合待行区的交通控制”运用排队论、流体力学模拟理论等理论方法并充分结合现有交通检(监)测、定位、导航、诱导、智能控制ITS等技术,建立了一整套能最大限度利用交叉口、路段的通行空间,在交叉口上游路段增设一组或多组信号诱导装置,提前对分向车流进行指示诱导,有序进入综合待行区多车道预排队再通行的交通控制的技术和装置。综合待行区域内的车道方向不再固定,而是根据需要不同方向车流可以交替使用。设置综合待行区的交叉口功能结构示意图如图1所示。
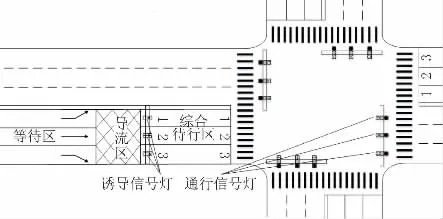
图1 设置综合待行区的交叉口功能结构示意图
在图1中,基于综合待行区的交通控制方法为通过在进口方向上的原有停车线后面加设一条停车线和车辆诱导信号灯,这样原有的车辆排队等待区就被重新划分为等待区、导流区、综合待行区三部分。车辆首先驶入等待区,等待诱导信号灯的指示;当诱导信号灯指示目标方向的通行即将开始,可提前进入排队区域时,车辆根据提示经过导流区驶入综合待行区相应车道;当通行信号灯指示目标方向可通行时,等待在综合待行区的车辆驶离综合待行区,快速通过交叉口。
2 方法特点
基于综合待行区的交通控制是采用双停车线的新型交叉口交通控制技术。该控制技术的特点主要有以下五个方面:
(1)实现了车辆的提前排队,减少延误,提高了交叉口的通行能力。
(2)交叉口信号灯相位组合更加灵活,每相位周期大幅缩短。
(3)充分利用交叉口车道资源,道路功能得到更大程度的发挥。
(4)投资小,适用范围广,效果突出,特别适用于已不能进行大规模拓宽改造的道路和大流量拥堵城市。
(5)减少了车辆停车次数,减少车辆怠速油耗,减少尾气污染、车辆磨损和交通出行时间,提高社会经济效益和优化生态环境。
3 双停车线位置选取原则
采用基于综合待行区的交通控制,涉及第二停车线的位置选择问题。如图2所示,影响两停车线间距D的主要因素有交叉口该方向的交通流量Q、两交叉口间道路长度L、是否设有公交站及其具体位置BL。
交通流量的大小是决定第二停车线位置的重要因素。两停车线间距与交通流量的关系可近似为图3所示的非线性关系,即D=f(Q)。在一定范围内,Q越大,第二停车线与第一停车线之间的D就要相应地扩大,但两停车线间的距离不能过大或者过小。另外,总长度L小于200 m的道路是不适宜设置综合待行区的。如果设有公交站的道路还应该满足BL≥D。
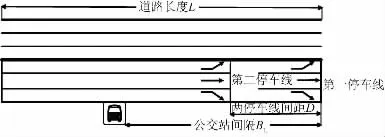
图2 停车线位置影响因素示意图
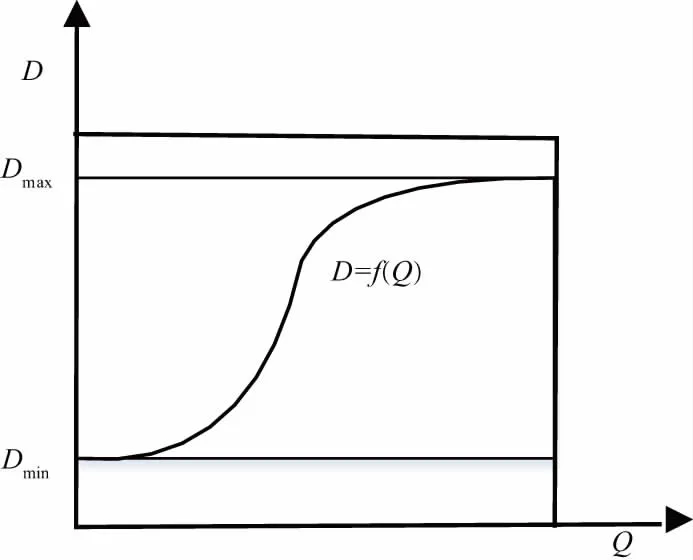
图3 两停车线间距与交通流量的关系示意图
4 相序研究
基于综合待行区的交通控制相序设计主要是指对通行指示灯和诱导指示灯相位顺序的设计。通行指示灯的相序相对于原先的交通信号灯相序来讲,组合方式更加灵活,相位配时大幅缩短。而对于诱导指示灯来说,其相序是超前于通行指示灯的。当通行指示灯为直行通行时,诱导指示灯为诱导左行填充状态,指引左行车辆驶入综合待行区等待;当通行指示灯为左行通行状态时,诱导指示灯为诱导右行填充状态,指引右行车辆驶入综合待行区等待;当通行指示灯为右行通行状态时,诱导指示灯为诱导直行填充状态,指引直行车辆驶入综合待行区等待;当通行指示灯为红灯等待状态时,诱导指示灯为诱导左、右行填充状态,指引左、右行直行车辆驶入综合待行区等待通过。
交叉口车流量是用单位时间内通过的车辆数来衡量的。基于综合待行区的交通控制采用相序“叠加”的方式,对要经过交叉口的车辆进行提前诱导排队,缩短了传统基于单停车线的控制方式中车辆换道排队的时间,大幅提高了通行效率。图4为多种交通信号控制方式下的交叉口车辆通行流量比较。

图4 多种交通控制方式信号相序比较
由图4可见,传统控制方式中各个通行方向的信号配时包括了排队与通行两部分,在拥堵的交叉口,车辆不能及时排队,通过交叉口的速度非常缓慢,严重的情况会导致多个交叉口间的连续拥堵。而基于综合待行区的交通控制方式将车辆排队提前,在当前相序阶段就有序地引导下一个相序阶段可以通过的车辆进行排队,这样在下一个相序阶段可以通过的车辆早已完成了排队,可以直接快速驶离交叉口。因此在图中三种交通控制方式的比较中,基于综合待行区的交通控制方式完成十字交叉口南北、东西两向的车辆放行所需的时间远小于传统控制方式,即基于综合待行区的交通控制的交通信号相序周期明显缩短。
5 仿真方案设计
5.1 双停车线位置选取
假设某平面十字交叉口南进口所在路段全长500 m,南向北方向距上游交叉口200 m处设有公交站。北进口所在路段全长600 m,北向南方向距上游交叉口300 m处设有公交站,南北进出口道均为三进三出车道规模。
南北方向距该交叉口50 m处设立了诱导信号灯,试进行基于综合待行区的交通信号控制。
5.2 交通信号相位设计
通行信号灯与诱导信号灯的相位图如图5所示。根据前文所述,诱导信号灯的时序总是超前于通行信号灯,当通行信号灯为红灯等待状态时,诱导信号灯为左、右行车辆诱导状态(见图5a、b);当通行信号灯为直行通过状态时,诱导信号灯为左行车辆诱导状态(见图5c);当通行信号灯为左行通过状态时,诱导信号灯为右、直行车辆诱导状态(见图5d);当通行信号灯为右行通过状态时,诱导信号灯为直、左行车辆诱导状态(见图5e、f)。
5.3 交通信号配时设计

图5 基于综合待行区的交通信号控制相位设计
双停车线法信号周期和各相位绿灯时长的计算是在经典Webster法基础上进行修正得到的。以延误做交通效益指标,用Webster定时信号交叉口延误公式优化,可得定时信号最佳周期时长:

式中:L为信号总损失时间;Y为流量比总和。整个交叉口中,各个相位的y值的总和,即Y=∑y,y是流量与饱和流量的比值。
信号总损失时间的计算:

式中:Ls为启动损失时间;A为黄灯时间;I为绿灯间隔时间;k为一个周期内的相位数。
根据式(2)确定的最佳周期时长,可得每周期的有效绿灯时间:

把Ge在所有信号行为之间按各相位的最大流量比值进行分配,得各相位的有效绿灯时间,如

由于采用双停车线法进行控制,第一停车区内排队的车辆放行时所用的时间比单停车线法控制时相同排队车辆数所需的时间短,根据双停车线法和单停车线法放行车道数的关系,修正后的有效绿灯时间为

式中:t直为单停车线法到双停车线法控制折算后的平均直行车排队长度放行所需的时间。
该式计算的时间为直行相位所需的时间。同理,左转相位所需的时间为

将各相位的有效绿灯时间加起来,再加上信号总损失时间就是双停车线法的最佳周期时间。然后再算得各相位的实际显示绿灯时间:

根据该交叉口的实际情况,本文设计了90 s的信号周期,如图6所示即为该交叉口南北方向的信号配时设计图,其中在通行信号灯的直绿、左绿、右绿时序内都包含了诱导信号灯的诱导时序。
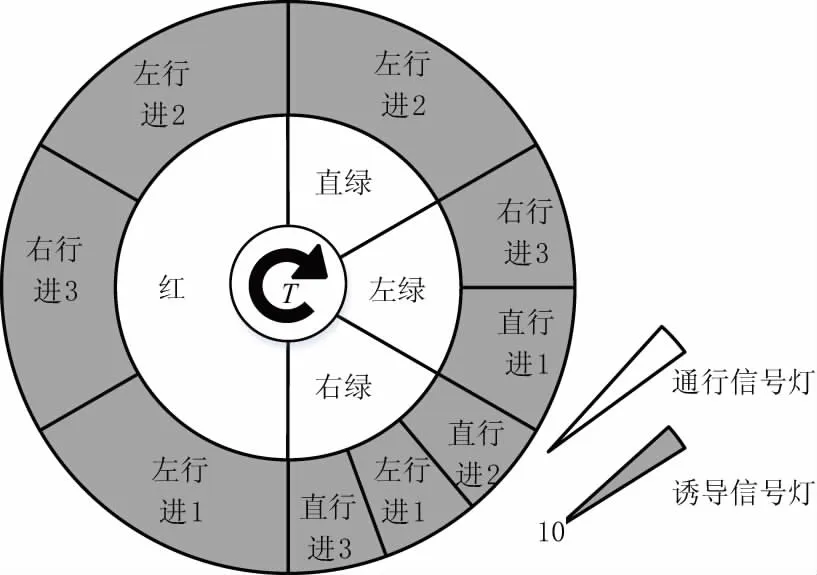
图6 基于综合待行区的交通信号控制配时设计
6 对比分析
目前仅在南北方向设计了综合待行区,试运行基于综合待行区的交通信号控制模式,对仿真结果进行分析。
根据实验数据,在提高交叉口通行能力方面,现有模式下,由于综合待行区的存在,使车辆提前进入准备阶段,从而提高了车辆通过交叉口的通行速度。据实验数据,现有模式下,南北向通行能力较传统的信号控制方式可增加约100%,整个交叉口通行能力可增加约70%。
在减少交叉口延误方面,以北进口为例,较传统的信号控制方式,运用排队理论简易算法计算出的最大降低延误约8倍,排队长度缩短约90%。
7 结语
综上所述,基于综合待行区的交通信号控制用于严重拥堵交叉口,可以充分利用交叉口的通行空间,保证良好的交叉口行车秩序,有效提高车辆通过交叉口的效率,降低交叉口行车延误,从而降低交叉口的交通排队和拥堵现象。如果大量使用该控制模式,可以从整体上降低能耗和交叉口汽车尾气污染,改善城市交通环境,特别是对于大流量的城市道路交通,应用基于综合待行区的交通控制系统将会有更明显的使用效果。这为解决当前城市道路交通问题开辟了新的解决思路,能带来巨大的经济和社会效益,相关方法可为城市交通设计及拥堵治理提供参考。
