基于智能视觉分析的水环境污染程度判断
2018-09-10周瑞芳
周瑞芳
摘要:水环境污染问题是关乎到人们身体健康的重要问题。水环境污染程度具有随机性和模糊性,导致传统的水污染程度判断模型需要大量的确定性数据,无法有效且高效地对水环境污染程度进行准确判断。通过建立基于智能视觉分析的水环境污染程度判断模型,利用USB摄像头获取水环境污染图像,对图像颜色特征和纹理特征进行提取,建立水环境污染程度分析模型,利用非均匀性响应算法对图像进行校正,弱化水污染环境图像边缘的信息敏感性,建立水环境污染图像的颜色对比度、人眼视觉范围内所能看到的最远距离及水环境消光系数之间的关系,最后引入绝对误差匹配法对水环境污染程度判断模型进行改进,完成对水环境污染程度的准确判断。实例仿真试验结果表明,提出的模型能够很好地对水环境污染程度进行实时判断,且判断结果准确。
关键词:智能视觉;水环境;污染程度判断
中图分类号:TP391
文献标志码:A
doi: 10.3969/j.issn.1000-1379.2018.04.021
有害化学物质(酸、碱、氧化剂,以及铜、镉、汞、砷等化合物,苯、二氯乙烷、乙二醇等有机毒物)造成水的使用价值降低或丧失,导致水体污染。污水会毒死水生生物,影响饮用水源、风景区景观。污水中的有机物被微生物分解时消耗水中的氧,影响水生生物的生命,水中溶解氧耗尽后,有机物进行厌氧分解,产生硫化氢、硫醇等难闻气体,使水质进一步恶化。目前,水环境污染已经严重影响到我国居民的健康,对水环境污染程度进行准确判断,根据判断结果对不同污染程度的水环境进行治理,是解决上述问题的重要途径。
主要的水环境污染程度判断方法包括基于线性滤波的水环境污染程度判断方法、基于粒子滤波的水环境污染程度判断方法和基于图像特征提取的水环境污染程度判断方法,其中最常用的是基于图像特征提取的水环境污染程度判断方法。但是传统的水环境污染程度判断方法存在实现过程复杂、耗时长、判断准确性差等弊端。
针对传统方法的缺陷,笔者建立了基于智能视觉分析的水环境污染程度判断模型,模型适用于叶绿素、石油类、化学需氧量等污染指标的判断。
1 水环境污染图像特征分解与提取
1.1 水环境污染图像颜色、纹理特征的提取
在水环境污染图像中,由于运动幅度图像特征(如水环境污染图像亮度、亮度空间位置信息、颜色、纹理等)存在一定的规律性,因此可以利用这些特征作为对运动幅度合理性分析的依据,本文对水环境污染图像颜色、纹理特征提取的具体实现过程如下。
为了得到成像质量较好的水环境污染数字图像,保证采集图像时成像条件的一致性不受环境光照强度等因素的影响,将USB摄像头固定安装在带有LED灯光照明的封闭箱体内,用灰黑色海绵材料作为背景进行图像采集,采集到的彩色数字图像以JPG格式保存。
将采集的一幅水环境污染图像定义为f(x,y),大小为M(长)×N(宽)像素。在水环境污染图像中任意选取两个像素点(X1,Y1)、(x2,Y2),设置这两个像素点之间的连线与横坐标轴之间的夹角为θ,则这两个像素点之间的距离d能够通过该夹角进行计算,利用θ和d计算出水环境污染图像的像素分布概率P(i,j|d,θ),其计算公式为式中:&{}为图像中运动幅度的像素数目;θ的取值限制在900之内。
对水环境污染图像颜色、纹理特征进行提取的公式为式中:V、K分别为水环境污染图像颜色、纹理特征当量;x、y为采用的像素点。
根据上述方法能够对水环境污染图像特征进行准确提取,为水环境污染程度判断提供准确依据。
1.2 水环境污染程度的可识别过程
在完成水环境污染图像颜色、纹理特征提取后,需要建立水环境污染程度分析模型。
设置水环境污染图像提取特征的数目为X,建立水环境污染图像颜色和纹理特征集:
P(X)=Mi=1∑aiPi(X)
(3)式中:P(X)为水环境污染图像颜色和纹理特征集;Pi(X)为水环境污染图像中关于颜色和纹理像素的高斯分布;χi为Pi(X)的权重。
获取水环境污染像素特征概率分布函数,获取公式为式中:R(θ为特征概率;l为图像范围;L()为像素点距离;Xl为某一特征数目。
然后对水环境污染像素特征概率分布函数进行细化处理:式中:T为时段;χi为权重;Pl()为图像特征集;xt为时段内图像分布;μi为污染像素特征概率分布。
细化处理后,进一步根据处理结果实现运动幅度特征的准确识别,并建立水环境污染程度判断模型:
n*=maxP(k|X)
(8)
根据上述方法,提取水污染环境图像中颜色和纹理特征,建立水环境污染程度判断模型,通过对图像中的颜色和纹理进行准确识别,最终实现水环境污染程度的合理分析。
2 水环境污染程度判断模型的改进
2.1 非均匀性响应的图像校正
由于水污染环境图像采集系统中存在非均匀性因素,会影响水污染环境图像的质量,因此需要对这种非均匀性因素进行校正,具体校正过程如下。
利用直线拟合的方法能够获得水污染环境图像采集设备响应xij(ψ)与校正输出y(ψ)之间的关系:
y(ψ)=Gijxij(ψ)+Oij
(9)式中:Gij為对水污染环境图像采集设备进行校正的增益;Oij为校正的偏置量。
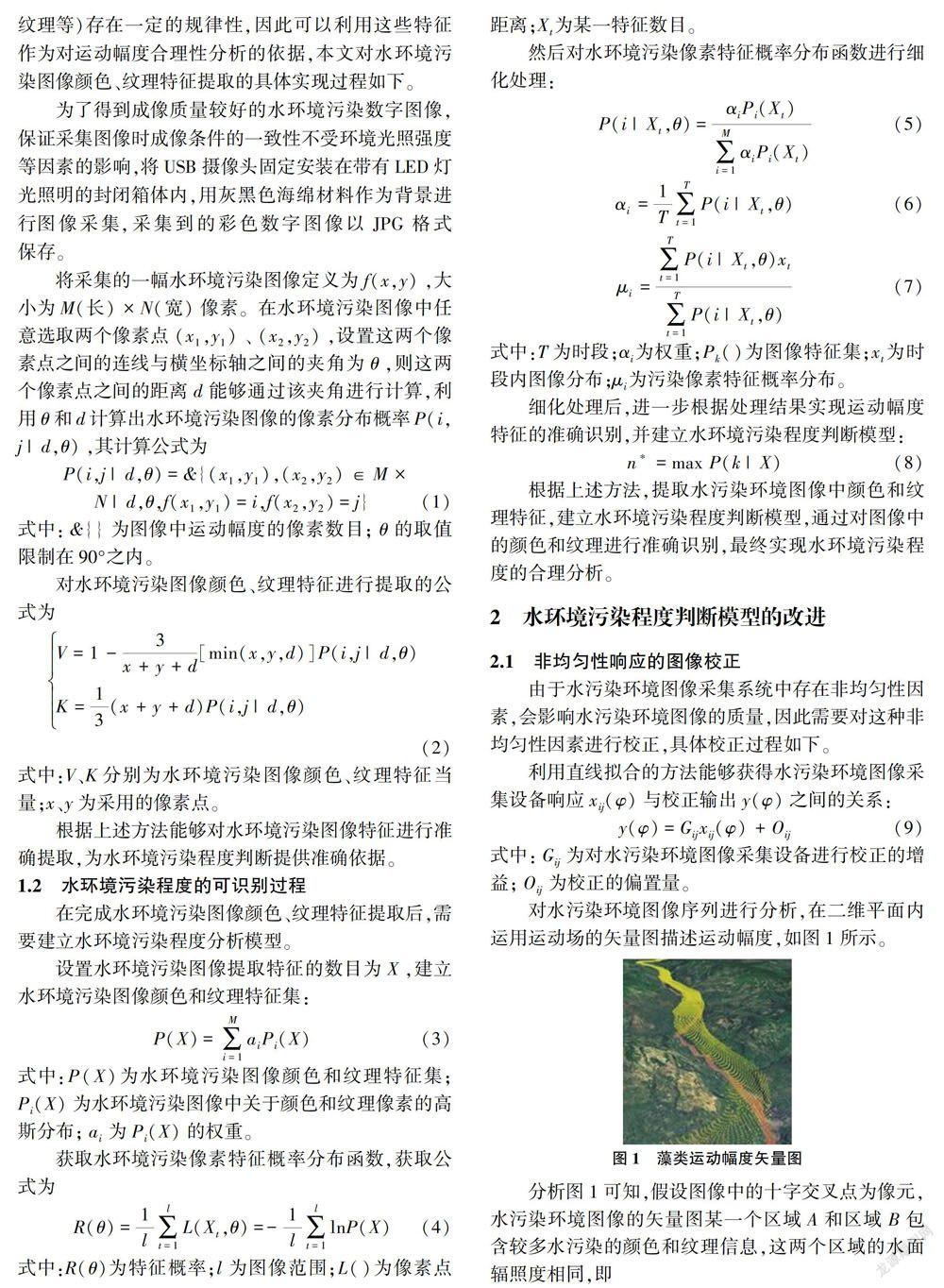
对水污染环境图像序列进行分析,在二维平面内运用运动场的矢量图描述运动幅度,如图1所示。
分析图1可知,假设图像中的十字交叉点为像元,水污染环境图像的矢量图某一个区域A和区域B包含较多水污染的颜色和纹理信息,这两个区域的水面辐照度相同,即
但由于水污染环境图像采集设备中存在着非均匀性响应,因此区域A的像元响应输出与区域B的像元响应输出不同,即
假如能在一个水污染环境图像序列中多次建立类似于区域A和区域B之间的关联,则利用最小二乘法能够建立区域A和区域B对应关系模型:式中:RAB、TAB分别为像元在区域A和区域B的颜色系数和纹理系数。在上述模型中,R,4B和TAB都能够随着水污染环境图像采集设备的非均匀性变化而改变。
假设在一个水环境污染图像序列中存在Ⅳ个此类的关联,则最小二乘的解为
按照相同的方法,能够对水污染环境图像其他区域(C~E)之间的关系进行描述:
利用替换法,能够建立x(C)与x(A)之间的变换关系,并可根据这些关联关系确定x(D)、x(E)与x(A)之间的变换关系,推至整个水污染环境图像,所有的响应值都能够归一化为A的响应值,这就实现了水污染环境图像的非均匀性校正。
2.2 水环境污染程度判断模型的改进
对水污染环境图像的非均匀性校正后,对水环境污染程度判断模型进行改进。由于人们视觉对水污染环境图像边缘的信息具有一定的敏感性,因此需要对这种敏感性进行弱化:
x'(A)=RABX'(B)
(16)
和亮度信息相比,人眼对颜色和纹理信息更加敏感,因此本文仅对图像的颜色和纹理信息进行研究,不考虑亮度信息。采用对数图像处理技术,塑造基于图像像素点的对数对比度模式,首先对图像进行灰度化操作,并设定相关阈值ε,假设水环境污染图像的颜色对比度为h,d为人眼视觉范围内所能看到的最远距离,s为水环境消光系数,这些参数的关系为
d=h/3s
利用绝对误差匹配法对水环境污染程度判断模型进行优化,并将式(17)计算的最大能见度d代人,实现水污染程度的判断,公式为式中:CSAD(i,j)为水污染程度;Ik为水环境的综合污染度。
如果CSAD(i,j)趋于人为设定的阈值ε,则当前水环境污染程度为轻度污染;如果CSAD(i,j)高于阈值ε,则当前水环境污染程度是重度污染;如果CSAD(i,j)低于阈值ε,则当前水环境污几乎没有污染。最小的CSAD(i,j)對应于最合理的污染程度判断结果。
3 试验结果及分析
3.1 试验环境设置
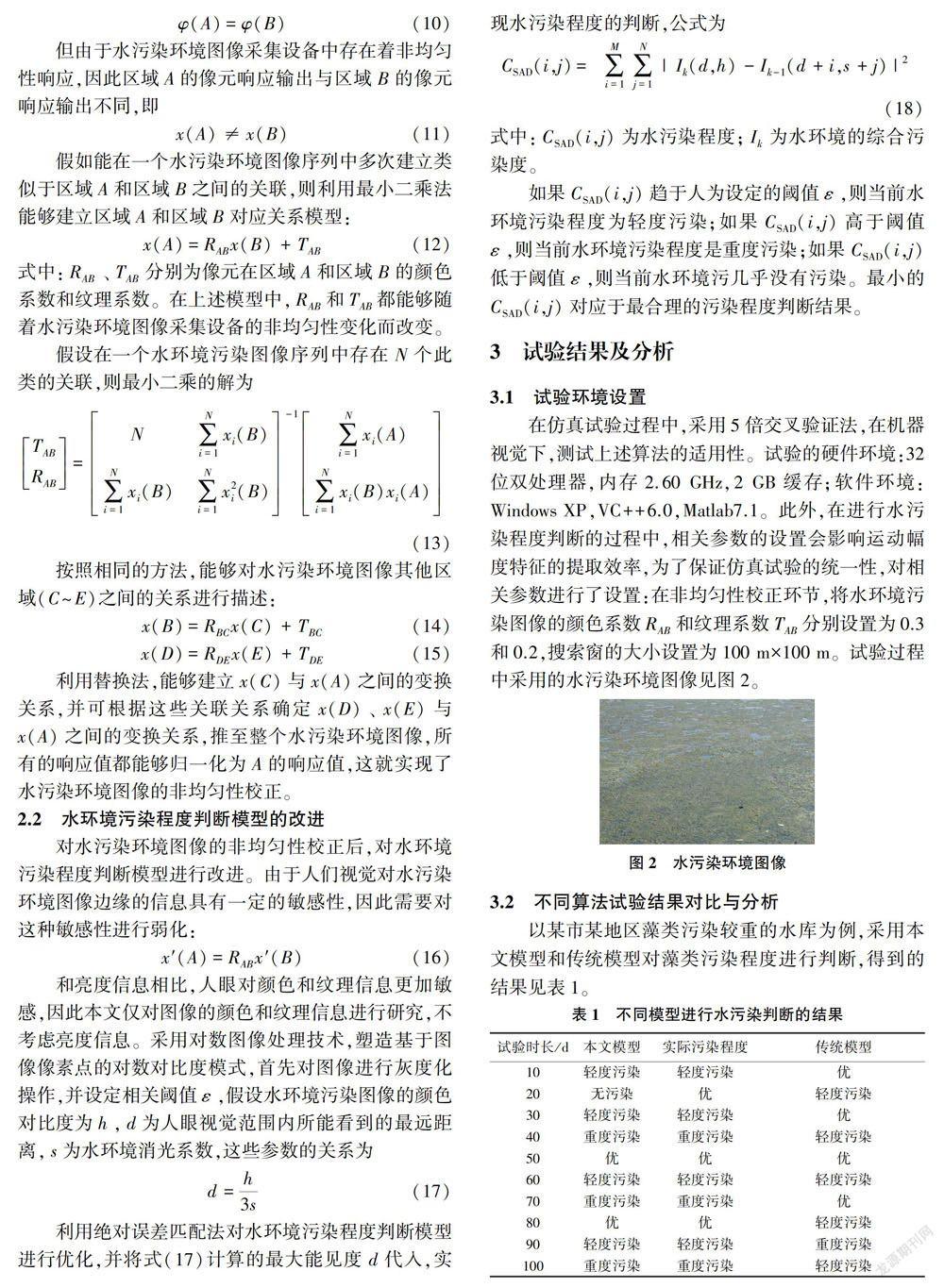
在仿真试验过程中,采用5倍交叉验证法,在机器视觉下,测试上述算法的适用性。试验的硬件环境:32位双处理器,内存2.60GHz,2GB缓存;软件环境:WindowsXP,VC++6.0,Matlab7.1。此外,在进行水污染程度判断的过程中,相关参数的设置会影响运动幅度特征的提取效率,为了保证仿真试验的统一性,对相关参数进行了设置:在非均匀性校正环节,将水环境污染图像的颜色系数RAB和纹理系数TAB分别设置为0.3和0.2,搜索窗的大小设置为100mxl00m。试验过程中采用的水污染环境图像见图2。
3.2 不同算法试验结果对比与分析
以某市某地区藻类污染较重的水库为例,采用本文模型和传统模型对藻类污染程度进行判断,得到的结果见表1。
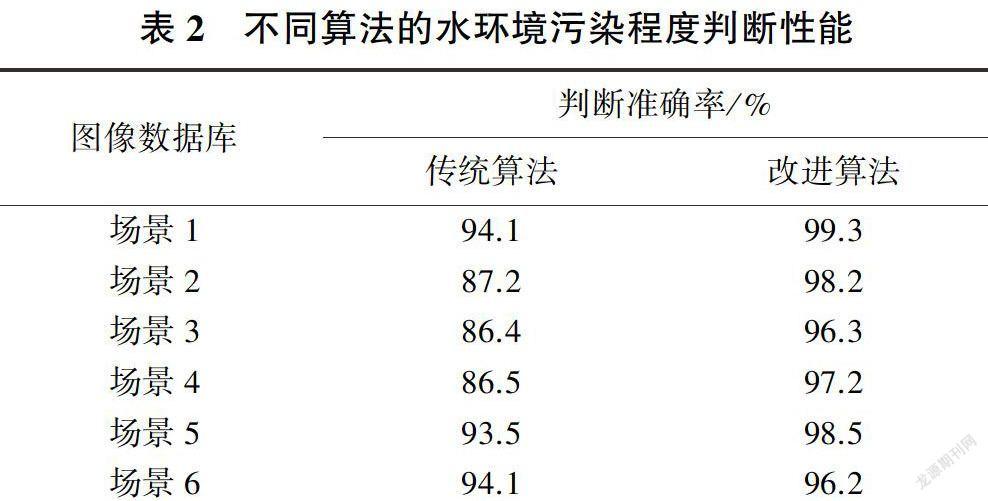
对表1进行整理,对不同模型下水环境污染程度判断的准确度进行对比,结果见表2。
由表2得知,改进算法对数据库中6种场景下运动幅度识别的准确率均高于传统算法的。原因是:首先,改进算法能够利用最小二乘法建立像素点之间的对应关系,实现图像采集设备的非均匀性校正:然后,利用矩形模块匹配的方法对运动幅度的合理性进行估算,并利用绝对误差匹配法对运动幅度合理性进行分析:最后,得到最小的绝对误差对应的运动幅度即为最合理的运动幅度,实现运动幅度合理性的分析。
为了进一步验证本文模型的效果,分别采用本文模型和传统模型对某市某地区水库藻类的污染程度进行判断,对模型的判断时间进行对比,结果如图3所示。
分析图3可知,在相同的试验时长条件下,本文模型进行水污染判断时,判断时间远小于传统模型的,判断效率高。
