轴系减振器相位角的频域分析提取技术
2018-09-08新宋璇蒋
张 新宋 璇蒋 励
1.西安邮电大学电子工程学院,西安,710121
2.西安邮电大学计算机学院,西安,710121
0 引言
船舶轴系是船舶动力装置中必不可少的组成部分,其主要作用是将主机发出的能量传给螺旋桨,从而带动螺旋桨旋转,螺旋桨旋转的同时产生推力推动船体前进[1⁃2]。船舶主机是船舶的动力心脏,其安全稳定的运行是保证船舶航运安全的关键[3],目前绝大多数船舶都以内燃机中的往复式柴油机作为主机,其轴系是弹性系统,在运转过程中,当干扰力矩的频率和轴系的固有频率相同时会发生扭转共振,其危害极其严重,因此,船舶复杂推进轴系扭转振动问题越来越受到重视[4]。加装减振器是吸收振动最直接的方法[5]。当遇到扭转振动时,减振器能起到缓和冲击的作用,将“大能量一次冲击”变为“小能量多次冲击”,进而逐步将“小能量多次冲击”减少[6]。
针对减振器性能的判断,目前国内外并未见具体研究。本文提出了船舶轴系减振器相位角频域分析提取算法,通过船舶轴系扭振测量仪测得减振器内、外圈扭角速度曲线,计算得到减振器相位角,对相位角数据用最小二乘法筛除误差较大数据,并进行曲线拟合,得到减振器相对相位角曲线;再计算后得到阻尼系数曲线,将其与标准阻尼系数曲线对比,即可判断该船舶轴系减振器的性能。
1 减振器相位角频域分析提取算法
船舶航行时减振器能有效减小轴系的扭转振动,避免断轴等危险事故。减振器属于易耗品,其性能随着时间的推移有所衰减,由此需要在航行时实时检测轴系减振器的性能。
针对目前无法直接测得减振器相位角这一问题,本文提出了减振器相位角频域分析提取算法。该算法通过扭振测量仪测得减振器内外圈扭角曲线,经过计算,最终得到减振器相位角及阻尼系数曲线。
使用某船舶轴系扭振测量仪测量得到减振器内圈扭角曲线Ainn(t)、外圈扭角曲线Aout(t),求导得到内圈扭角速度曲线Vinn(t)、外圈扭角速度曲线Vout(t),根据实时差值求导得到相对扭角速度时域曲线Vrel(t):

对Vout(t)和Vinn(t)的傅里叶变换进行频域分析,得到两个时域曲线的各谐次幅值An、Bn,其中,n代表第n谐次。

作为n缸机主谐次的n谐次扭转振动占主要地位,其他谐次干扰很大,可忽略。第n谐次的相对扭角速度(t)满足如下关系式:

式中,An为Vout(t)第n谐次幅值;Bn为Vinn(t)第n谐次幅值;Cn为Vrel(t)第n谐次幅值;φ为减振器相位角;θ为弹性扭矩与阻尼扭矩的矢量合成角。
由式(2),得
由减振器外圈角加速度产生的减振器内外部分的总扭矩Ttot(弹性扭矩及阻尼扭矩),可以通过减振器扭角加速度a(t)与减振器的转动惯量J相乘得到,即
根据计算所得的合成角θ,弹性扭矩Tela和阻尼扭矩Tdam分别为

最后可计算出阻尼系数

2 误差分析
2.1 误差产生的原因
上文提出的减振器相位角频域分析提取算法在理论层面是准确的,但在实际测量中,难免会产生误差,原因如下:
(1)由于测量环境是基于固定在轮机舱甲板以及减振器外壳的传感器获得原始信号,故扭转振动通过机舱振动传递到传感器,使传感器自身存在一定的扭摆抖动,其中,减振器内圈的扭振信号来自主轴自由端的光电编码器,角码器自身也存在一定的扭摆,该扭摆的幅度会更大,这两者的扭摆给相对扭角速度的测量和计算带来一定的误差,该误差进一步影响到相位角φ和扭矩矢量合成角θ,产生较大的误差干扰,导致计算获得的相位角和扭矩矢量合成角在同一转速下产生较大变化。
(2)船舶振动中除了扭转振动,还存在由海上复杂环境所引起的其他振动,因此,获得原始信号的传感器会受到船体其他振动的影响。
(3)传感器自身会受到经由船体传导的振动信号,该信号具有多径性和回声性,会对原始信号产生干扰。
(4)对减振器性能的分析是基于船舶匀速行驶时采集的数据,因此,船舶在紧急加速和减速状态下行驶的数据会有一定误差。
2.2 误差消除的方法
当误差无可避免时,为了使结果更准确,需要消除数据误差,一般有2种方法:利用数字滤波技术消除误差;人工数据处理消除误差。
数字滤波技术是针对可能存在的误差,建立数字滤波器模型,对测得数据进行数字滤波。该方法方便快捷,可应对大量数据,但目前效果不如人工手动处理,还需后续进一步研究改善。而人工数据处理是将测量得到的数据进行曲线拟合,得到一条相对平滑的曲线。将原始数据(图1、图3)与拟合曲线(图2、图4)进行对比,见图1~图4,人工删除相差较大的点。该方法效果较好,但费时费力。
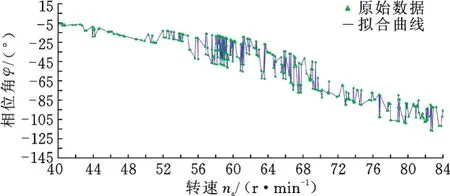
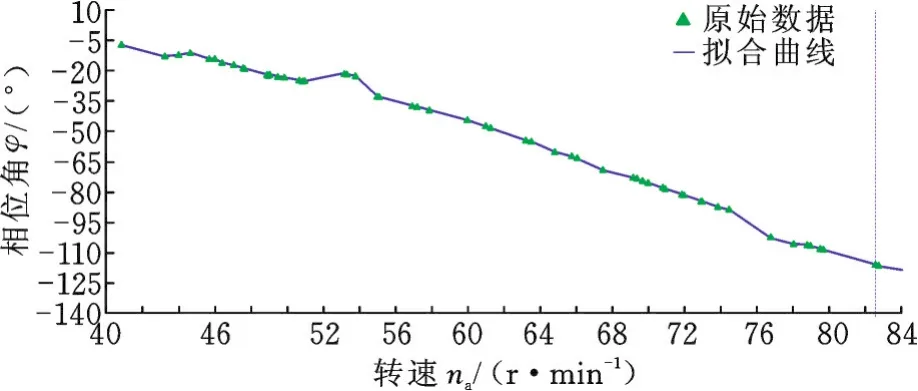
图2 误差处理后的减振器相位角曲线Fig.2 Phase angle curve of dam per after error p rocessing
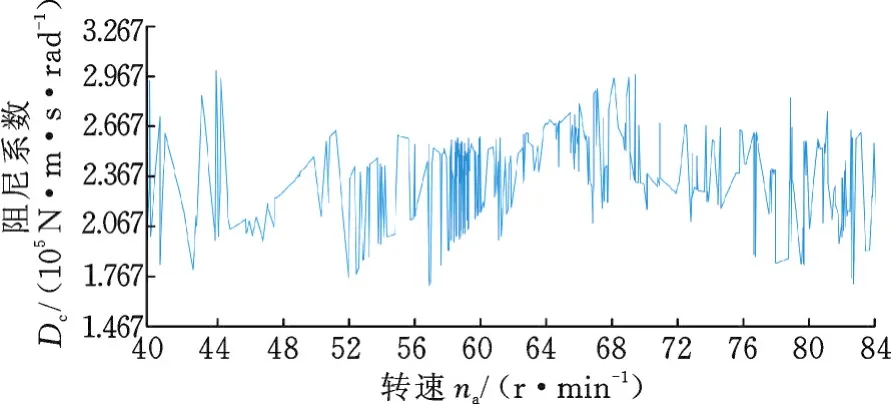
图3 误差处理前的阻尼系数曲线Fig.3 Dam p ing coefficien t cu rve before error p rocessing
3 实船测试
应用本文提出的减振器相位角频域分析提取算法,在某船厂“春和”号轮船上进行扭转振动测试,船舶在压载工况下保持正常发火及直线航行,主机转速以1 r/m in的步长从40 r/m in缓慢加速至85 r/m in,在每个转速工况下至少稳定1m in时记录数据。该船舶为5缸机船舶,故n=5,应用本文算法进行计算分析。
在减振器内外圈测得1节点5谐次扭振共振,共振转速为52.84 r/m in,内圈共振振幅1.218°(21.254m rad),外圈共振振幅2.342°(40.876m rad)。根据测得工况,合成给出的减振器内外圈和相对扭角振幅的频域曲线,见图5、图6。
根据上文算法,计算出相位角数据,再利用M ATLAB中基于最小二乘法原理的polyfit函数对所得数据进行曲线拟合,并筛除误差较大的数据,最终拟合的减振器相对相位角曲线见图7。根据减振器外圈扭角速度计算得到的扭角加速度曲线见图8。
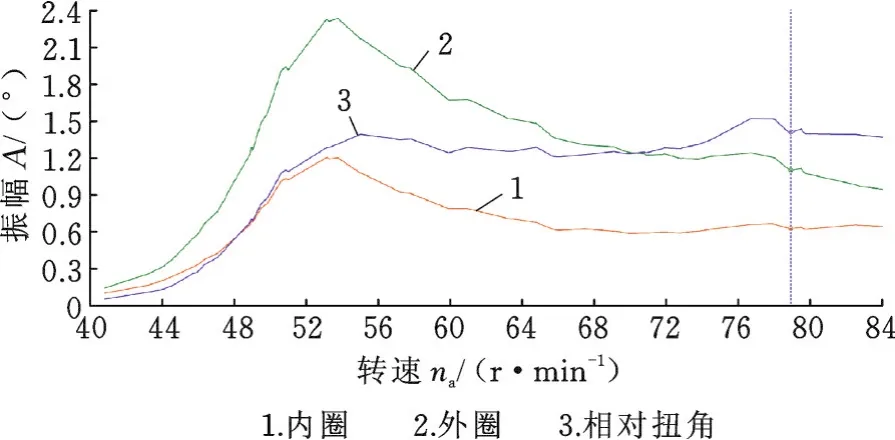
图5 减振器第5谐次扭角振幅曲线Fig.5 Am p litude cu rve of torsional angle of fifth harm onic dam per
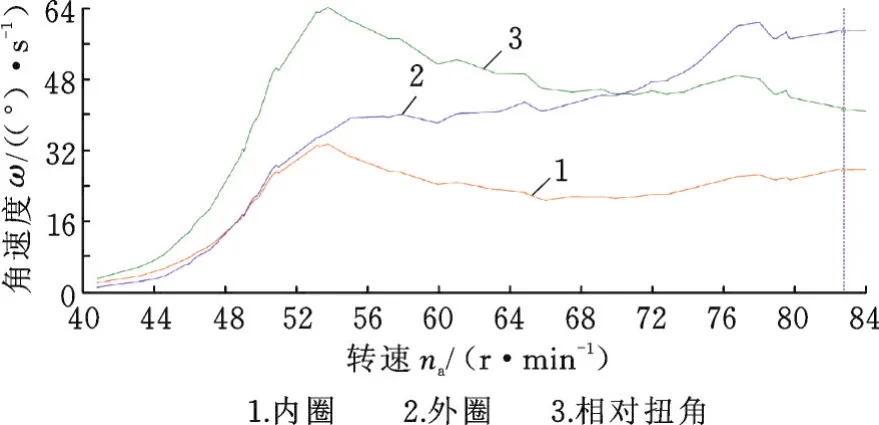
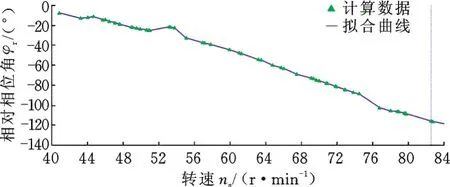
图7 减振器相对相位角曲线Fig.7 Relative phase angle curve of dam per
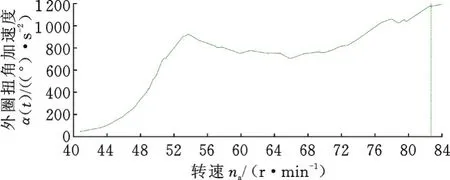
图8 减振器外圈扭角加速度曲线Fig.8 Tw ist angle acceleration curve of dam per ou ter ring
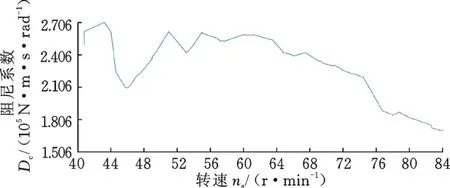
运用本文算法,最终计算得到的减振器弹性扭矩和阻尼扭矩曲线见图9。根据式(5)~式(9)计算得到阻尼系数Dc,见图10,根据船舶自身参数,式(6)中转动惯量J=13 900 kg·m2。
通过图7、图10实船测试得到的相位角曲线和阻尼系数曲线,与国际标准曲线图11、图12对比,即可判断出该减振器的性能。由此证明,本文提出的减振器相位角频域分析提取算法的准确性。
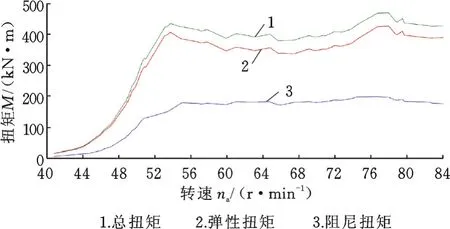
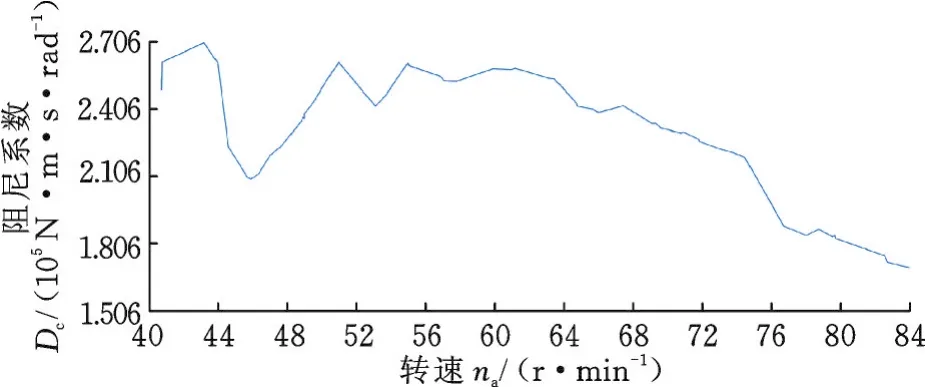
图10 阻尼系数曲线Fig.10 Dam p ing coefficient cu rve
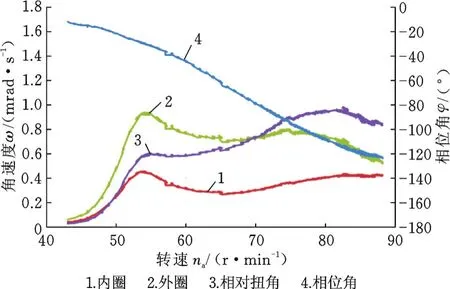
图11 相位角的标准曲线Fig.11 Standard curve of phase angle
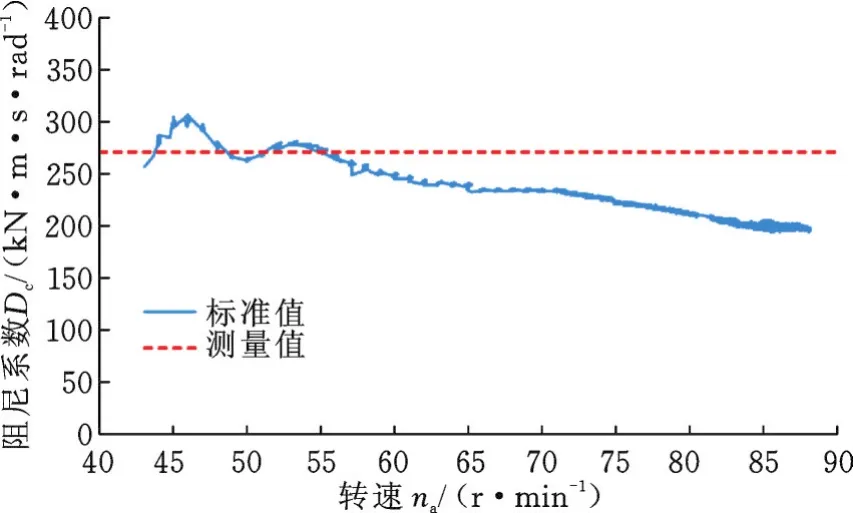
图12 阻尼系数的标准曲线Fig.12 Standard curve of dam ping coefficient
4 结论
本文针对船舶行进过程中无法判断减振器性能这一问题,提出了减振器相位角频域提取技术,使用船舶轴系扭振测量仪测量得到减振器内外圈扭角速度曲线,通过傅里叶变换进行频域分析,得到两曲线的幅值曲线,再经过三角变换得到减振器相位角与合成角,经计算得到阻尼系数曲线。通过与标准阻尼系数曲线对比,判断减振器性能。通过实船测试,验证了该算法对减振器相位角、合成角和阻尼系数计算的准确性,以及该算法的实用性,算法可广泛用于轴系减振器测量分析中。
