基于单差正交模型的GNSS伪距差分定位技术
2018-09-01韩春阳梁宵秦红磊
韩春阳,梁宵,秦红磊
(1 北京卫星导航中心,北京 100094;2 北京航空航天大学,北京 100083)
0 引言
差分 GNSS(Differential GNSS,DGNSS)最初构思于20世纪80年代作为一种消除在空间上高度相关的卫星导航误差的手段。由于 2000年5月之前GPS C/A码的最大误差源是人为的时钟误差失真称为选择可用性(S/A),DGNSS的第一个动机就是希望消除这种人为引起的误差源。现在,S/A已经取消,DGNSS通过消除几乎所有由于卫星时钟和星历误差以及电离层和对流层延迟的原因引起的剩余空间相关误差,从而为用户提供更高精度的导航参数。伪距差分定位相较于载波相位差分定位虽然精度较差,但其不需要固定载波相位带来的整周模糊度,不受周跳等因素的影响,所以伪距差分定位可以作为GNSS载波相位差分系统的辅助或者是在精度要求不高的系统中实现快速定位。
1 传统的双差伪距差分定位方法
双差是差分定位中经常使用的一种方法,涉及到两个接收机在同一时刻对两颗卫星的测量值。它是在星间和站间各做一次差分,可以进一步消除测量值中的接收机钟差。假设移动接收机B和基准站接收机A同时跟踪卫星m和卫星n,如图1所示。

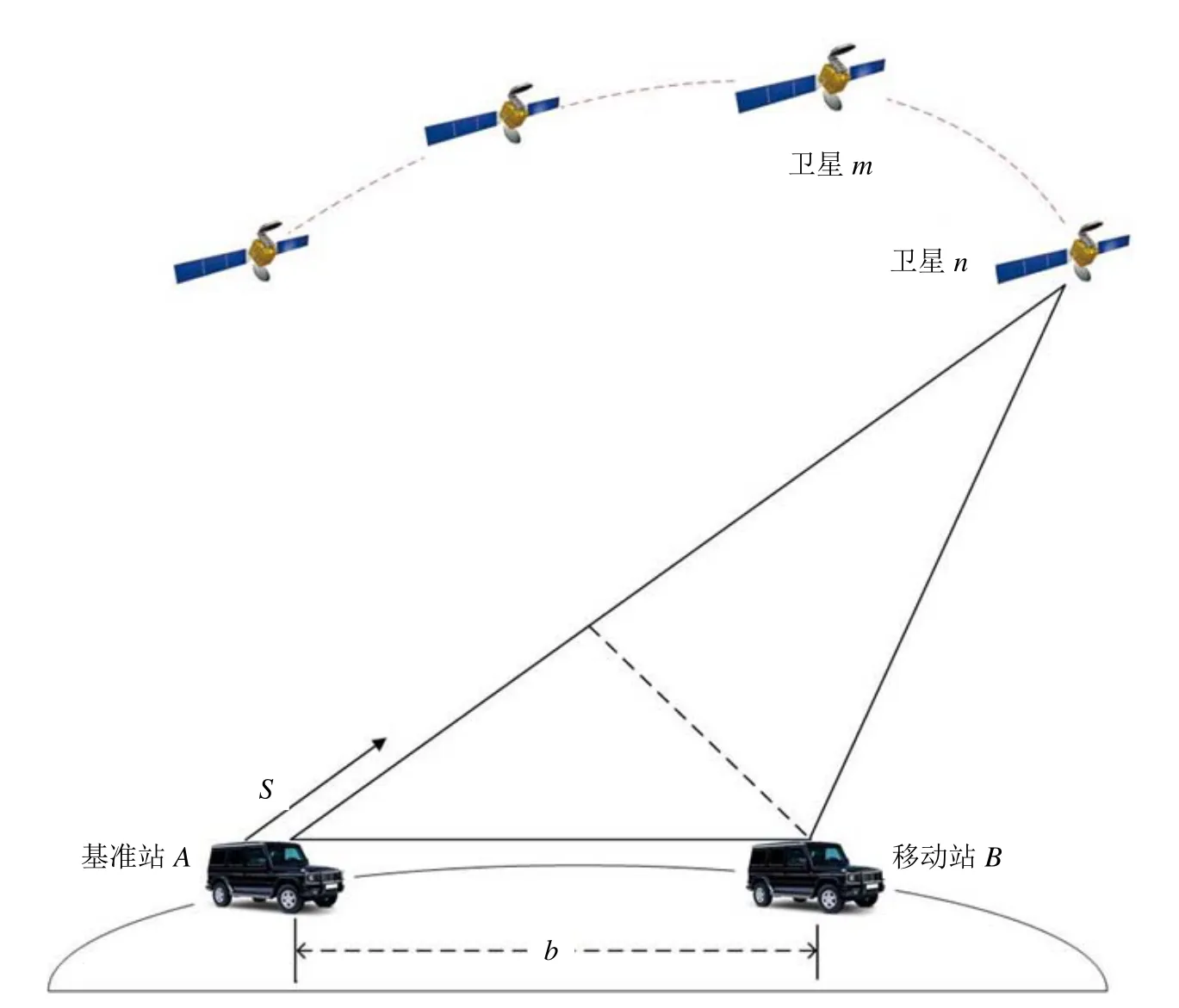
图 差分定位模型
卫星信号接收机A接收到卫星m的原始码伪距的观测值表示为[1]:其中,P表示接收机的原始码伪距观测值;上标m表示卫星号;下标A表示接收机;i表示频点;表示卫星信号传播到接收机的距,表示卫星和测站的位置矢量;dtA和δtm分别表示接收机和卫星钟差;表示对流层延迟误差;I表示电离层延迟误差,电离层延迟误差与频率成反比;e表示噪声项。
同理卫星信号接收机B接收到卫星m的原始码伪距的观测值表示为:

根据式(1)和式(2)对接收机A和接收机B做一次差分可得:

此时,单差公式表明卫星钟差δtm在单差后被彻底消除了。然而单差测量噪声的均方差却增大到原载波相位测量噪声或)的 2倍。
同时,天线A和天线B相对于卫星m的站星距的单差值可以看做基线b在视向矢量上的投影,记做则

继续对卫星m和n进行一次差分,可得:

若用户与基准站距离较近,则双差电离层延时约等于零,而当两者又处于同一高度时,双差对流层延时也会接近于零,

扩展为m颗卫星的差分定位可以进一步得到[2]:

其中,


2 单差正交伪距差分定位方法
除了经典的双差方法可以消除钟差项,采用单差的正交变换也能够消除钟差项,并且噪声项的统计特性不变。单差正交模型最初由华裔学者Chang Xiaowen提出。他将单差正交模型运用在了独立的载波差分定位中[3]和载波相位与伪距的组合观测量定位中[4,5],本文将构建应用于伪距差分定位的单差正交模型。下面进行具体阐述:
由式(2)和式(4)可知,

对于m个卫星而言,则有m个单差方程。其数学模型如下:

为了削减钟差项,需要进行Householder变换,具体如下:



可以看出,之后第一行是包含钟差项的,后(m-1)行则不含钟差项,将不含钟差项的(m-1)行方程提取出来:

最终根据式(12)进行基线的解算,实现差分定位。传统的单差方程含有接收机的钟差项,但双差方程又会扩大噪声项,使得噪声项变成观测值噪声的2倍,而本文提出的算法,很好的避免了上述两种情况的产生,从而提高了最终结果的解算精度。码差分无需整周模糊度的解算,能够在单历元得到米级或分米级的定位精度,可以用来辅助载波相位进行差分定位[6]。
3 实验验证
为了验证基于单差正交模型的GNSS伪距差分定位技术,我们进行了动态实际数据验证。在动态实际实验中使用的天线为HX-BS781A天线。接收机板卡为Novatel公司推出的OEM6 GNSS板卡。数据的更新频率为1Hz。在动态实验中,数据的采集位于北京市朝阳区大屯路路段。数据采集时,基准站固定不动,天线架设在一个 2.5m的支架上,确保高于周围行人和车辆,以此降低多路径效应的影响。基准站的坐标经过事后处理可知为东经116.406227,北纬40.009005。在车顶安放天线作为移动站。车沿着一个狭窄的矩形区域行驶。移动站天线放在一辆车的车顶上,车辆围绕大屯路以不同的速度运动,移动站的接收机放在车辆内。本次动态测试共分为两个实验,第一个实验以 35km/h的平均速度围绕大屯路绕行 7圈,第二个实验以50km/h的平均速度绕大屯路绕行7圈。图2为整个的实验过程中经过的路段,图2为整个的实验过程中经过的路段,途中圆点为基准站,矩形框为动态测试路段。

图2 动态测试实验示意图

图3 GPSL1频点码差分基线结果与IE处理结果差值图
为了测试当前系统在动态下的精度,本系统的输出结果需要有相应的比对标准才能验证精度。我们将解算结果与Inertial Explorer 8.50事后处理软件确定的精确相对位置相对比。Inertial Explorer(IE)后处理软件是 NovAtel 公司Waypoint研发的强大的、可配置度高的事后处理软件,用于处理所有可用的GNSS、INS 数据,提供高精度导航信息,包括位置、速度和姿态信息。基于NovAtel 硬件平台,IE能够实现厘米级定位精度。
实验中分别采用了GPS L1频点数据和北斗B1频点数据。同时利用事后处理软件IE对两种运动速度的原始数据进行处理,将两者的基线解算结果做差得到了图3所示的结果。

图4 北斗B1频点码差分基线结果与IE处理结果差值图
分析图4可知,伪距差分的结果相较IE处理结果的误差基本稳定在1m范围内,偶尔有超出1m的波动,是由于城市环境下,伪距观测值的多路径效应所引起的。为了更直观的对数据进行分析,将差值的绝对值进行统计处理如表1所示。
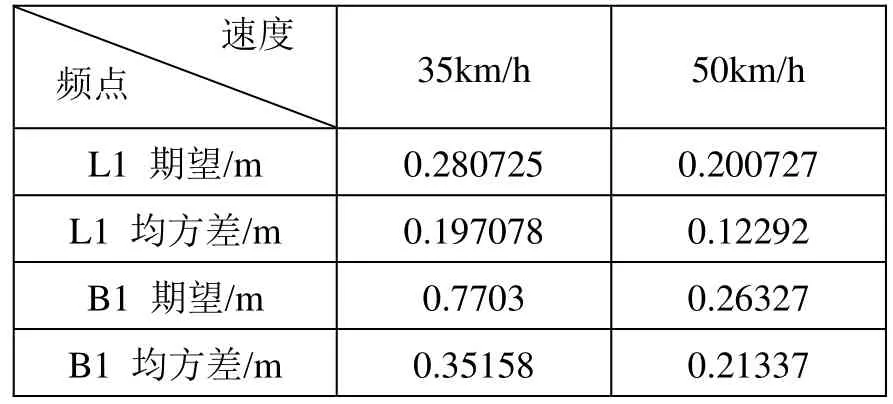
表1 码差分基线结果与IE处理结果的差值图
当速度较高时,码伪距差分结果更接近 IE事后处理软件。因为 IE软件事后处理是采用高精度的载波观测值,当速度变高时,载波的误差相应的也会变大,使得解算结果相较静态的毫米级误差有所改变。
4 结束语
伪距差分定位不需要进行整周模糊度的解算,可以实现单历元下的快速解算。根据分析和实验结果表明,基于单差正交方法的伪距差分定位可实现分米级的定位精度。从而可将码差分定位用于精度要求不高的差分定位应用中实现较高的定位可靠性。同时也可以利用伪距差分定位约束载波相位的差分定位,实现载波相位差分定位的快速、高精度解算。