基于挖掘机GNSS精确定位的开采姿态监测系统
2018-08-26张峰
张 峰
(长治市煤矿安全技术培训中心, 山西 长治 046000)
引言
目前挖掘机在进行开采时,主要依靠驾驶员的经验,在操作室中观察铲斗位置来进行挖掘作业。该方式对驾驶员依赖较高,但每铲位置不能准确定位,每铲是否达到挖掘目的不得而知,并且由于驾驶员无法精确定位挖掘机位置,实际挖掘作业区域与计划挖掘作业区域可能存在较大误差。结合近年来自动化技术的快速发展,挖掘机智能化作业水平也在不断提高,目前挖掘机自动化系统基本采用在挖掘机工作装置上安装传统的位移传感器及角传感器来对挖掘机的工作姿态进行测量[1-2]。但在挖掘作业中,工作装置无法避免与待挖掘物质接触,甚至碰撞,很容易造成传感器的损坏。因此作者从实际出发,以GNSS高精度定位测姿与视觉测量技术为基础,对挖掘机开采姿态的监测系统进行研究。
1 开采姿态监测原理
挖掘机主要是由行走机构与工作装置构成的,行走机构负责完成挖掘机的行走动作,工作装置(见图1)则通过液压系统驱动回转装置、动臂、斗杆以及铲斗配合动作来完成挖掘动作,铲尖即为挖掘作业实际作业点。因此挖掘机的开采姿态完全取决于动臂、斗杆和铲斗间的相对位置。
将挖掘机工作装置简化为连杆机构,在工作平面内以动臂和机身铰接点建立直角坐标系,如图2所示。

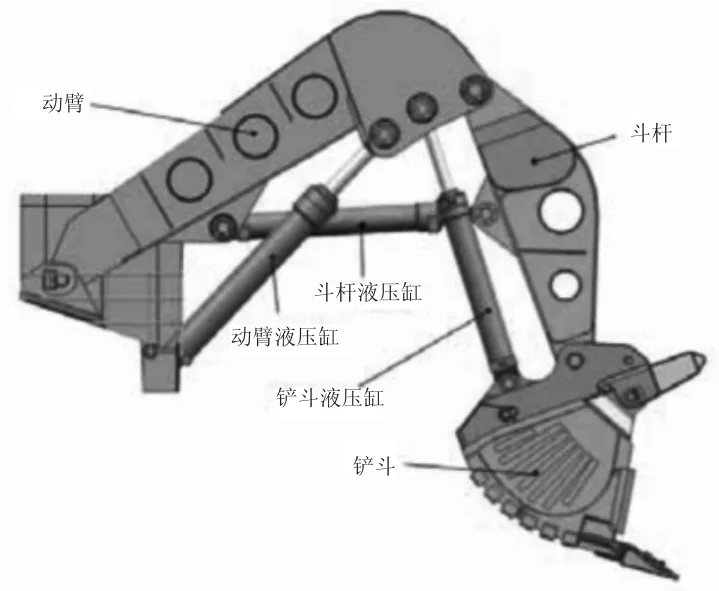
图1 正铲挖掘机的工作装置

图2 挖掘机工作装置简化连杆结构坐标系示意图
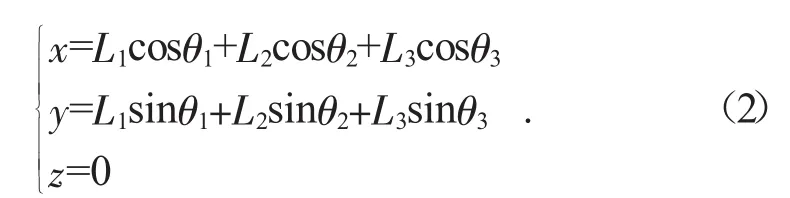
由式(1)可知,铲尖的位置坐标是由动臂与水平方向夹角θ1(动臂姿态角)、动臂与斗杆夹角θ2(斗杆姿态角)、斗杆与铲斗夹角θ3(铲斗姿态角)所决定的,要实现挖掘机开采姿态的监测就需要准确测量这三个姿态角。通过测量出三个姿态角的数值,可以计算出铲尖C相对于动臂与平台铰接点O的相对坐标,再利用GNSS系统高精度定位,可以计算出点O的实际经纬坐标,进而推导出铲尖C的实际经纬坐标,即可实现对挖掘机开采位置及开采姿态的准确监测。
2 GNSS精确定位测姿
2.1 GNSS精确定位
定位功能是卫星系统的基本功能,本项目采用的GNSS接收器是双系统定位接收器,采用双系统定位解算算法,最大程度消除不利误差,能显著提高定位精度。
定位解算模块是GNSS接收器精确定位的核心模块,是定位解算算法的载体。通过基带解算模块提供的每个卫星的导航电文、伪距和伪距时间和载波相位对每个卫星进行捕获与跟踪,从而解算出接收器的实际经纬位置[3]。通常的定位解算算法适用于单系统定位,靠四颗卫星进行定位,精度较差,受电离层效应、卫星轨道误差及卫星时钟误差的影响较大,常用如下单系统卫星导航公式:

式中:Δp 是伪距,Δtu是卫星时钟差,a 为系数,Δxu、Δyu、Δzu是卫星坐标与接收机坐标的差值。
双系统中只有cΔtu是不一致的,假设只能接受到3颗A系统卫星信号,2颗B系统卫星信号,则B系统的导航公式为:

将式(7)与式(8)相减可得:

用式(9)与A系统导航公式联立,即可求解接收器坐标。
以我国北斗2卫星系统和美国GPS卫星系统为导航系统,GNSS双系统定位工作流程图如图3所示。
该系统可自动选择信号较强的卫星系统作为主定位系统,并通过另一卫星系统对参数进行修正,得出精度更高的最终定位数据。
2.2 GNSS双天线测姿
双天线测姿功能是GNSS系统的另一重要应用,通过一个载体上多个天线间基线矢量的测量,能够测定出载体相对于当地坐标系的姿态,再经过坐标系间的转换,可以得到载体相对于地心坐标系的姿态[4]。
图4为挖掘机相对于当地坐标系的偏航角、俯仰角、横滚角示意图,其中O-XBYBZB为挖掘机坐标系,YB为挖掘机前进方向,XB为挖掘机右侧,ZB垂直于两轴;O-XLYLZL为当地坐标系,采用常用的“东-北-天”坐标系。在挖掘机上安装的两天线间的基线矢量投影到当地坐标系上,与YL轴的夹角即为偏航角,与当地水平面的夹角即为俯仰角,XB轴与XB'轴的夹角即为横滚角。
3 视觉测量系统
视觉测量技术是一种新型的非接触测量技术,以计算机视觉理论为基础,可以在一定条件下对空间坐标进行测量和定位[5]。本项目采用的是单目视觉测量系统,基本原理如图5所示。P点为测量目标点,在摄像机坐标系中的坐标pc可利用计算机从图像中获取,再经过坐标矩阵变换,即可得到P点在世界坐标系中的坐标pw。
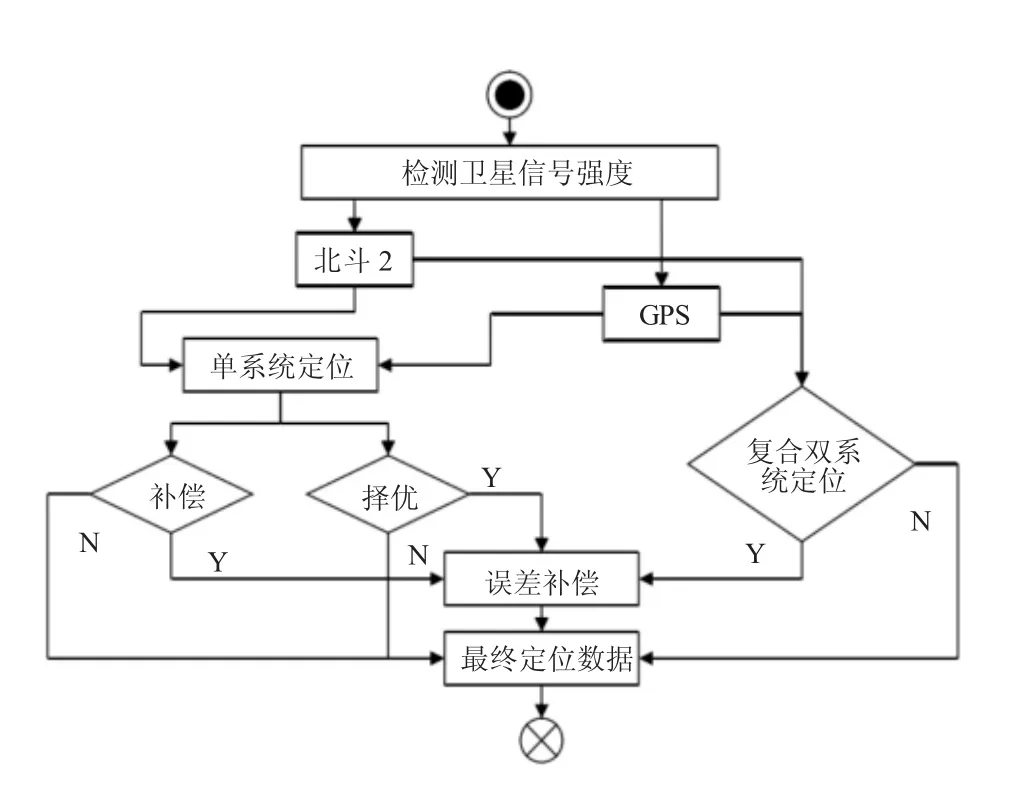
图3 GNSS双系统定位算法工作流程
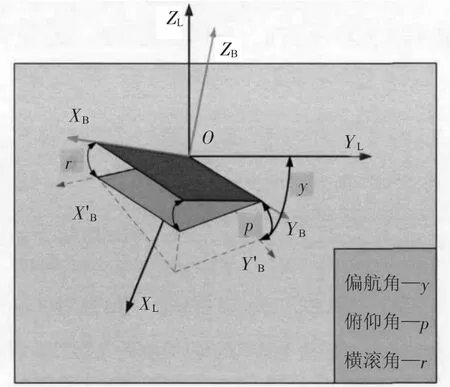
图4 偏航角、俯仰角、横滚角示意图
3.1 坐标转化过程
3.1.1 图像坐标系转化至图像平面坐标系
摄像机镜头通常有一定的畸变,设P点的图像坐标(r,c)变换至图像平面坐标系的畸变坐标为(~u,~v)为
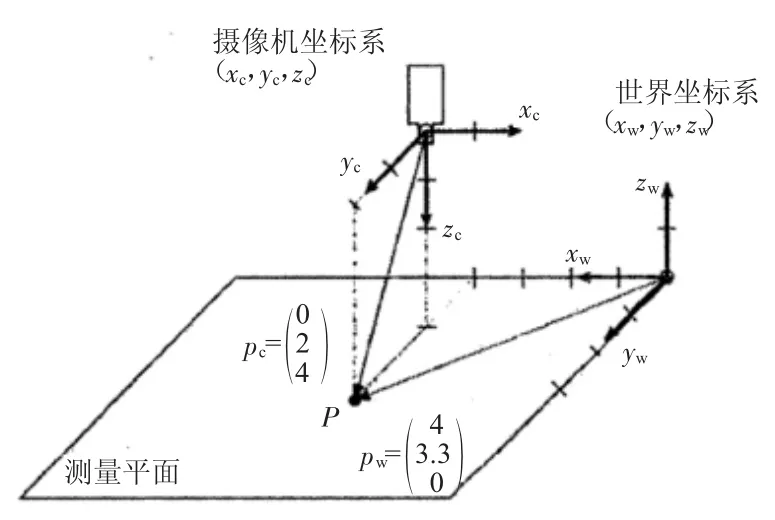
图5 单目视觉测量原理
式中:Sx、Sy为比例因子,面阵相机两个成像单元的距离;cx、cy为成像中心位置。
畸变坐标可通过数值拟合法拟合为图像坐标:

式中:k为径向畸变因子。
3.1.2 图像平面坐标系转化至摄像机坐标系
通过透视投影,可将图像平面坐标系坐标(u,v)转化至摄像机坐标系坐标(xc,yc,zc),
式中:f为镜头焦距。
3.1.3 摄像机坐标系转化至世界坐标系
利用齐次变换将摄像机坐标系坐标转化为世界坐标
式中:Hc,w为齐次变换矩阵;R为旋转矩阵;t为平移向量。
将利用计算机视觉测量得到的P点图像坐标(r,c)代入式(10),经过式(11)—(14)进行变换即可得到P点的世界坐标。在坐标变换过程中,旋转矩阵和平移向量是通过摄像机标定得到的,其余参数则由摄像机及光学镜头的物理特性决定[6]。
3.2 姿态角解算
将视觉测量标靶粘贴在动臂、斗杆及铲斗连杆上,每个标靶上有位于同一直线上的三个特征点,保证特征点连线与动臂、斗杆平行,以斗杆为例,使用视觉测量系统提取出斗杆上三个特征点的平面坐标,(xO,yO)、(xA,yA)、(xB,yB),如图 6 所示。

由于特征点之间连线与斗杆平行,因此向量倾角即为斗杆姿态角,为减小误差,可取三者均值。同理,可以得出动臂姿态角。由于铲斗需要经常接触挖掘对象,不易布置标靶,所以通过监测铲斗连杆的倾角,经过几何变换得到铲斗的姿态角,在此不再赘述。
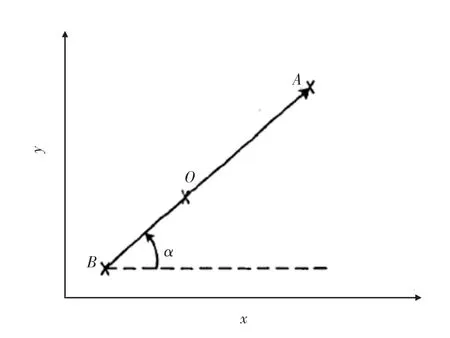
图6 斗杆姿态角解算原理图
4 系统设计
通过以上分析,由GNSS高精度定位测姿技术可以准确测量挖掘机的行走姿态(方向),并对挖掘机进行精确定位,通过视觉测量技术可以测量出挖掘机工作装置的三个姿态角,用以描述挖掘机的开采姿态,通过对挖掘机工作装置模型的分析,可以经坐标变换得到铲尖的实际经纬坐标。本系统将三者有机结合起来,将算法集成写入中央处理器中,作为终端装置安装在挖掘机上,收集挖掘机实时信息,并通过信息传输模块发送给服务器。服务器根据接收到的信息与已储存的挖掘作业区域的坐标进行对比,图像形式将结果反馈至终端,从而实现对挖掘机的作业引导与开采姿态监测。
5 结语
通过GNSS高精度定位测姿技术与视觉测量技术,利用安装在挖掘机上的终端装置实时测量挖掘机的行走及开采姿态参数,通过坐标矩阵变换,解算出挖掘机及铲尖实际位置,并用服务器进行引导,达到了准确进行挖掘作业并实时监测的目标。
