基于完整运动约束的车载GPS/IMU组合方法
2018-08-23顾青涛孙书良
顾青涛,孙书良
(1.北京卫星导航中心,北京 100094;2.中国电子科技集团公司第五十四研究所,河北 石家庄050081)
0 引言
惯性测量单元(Inertial Measurement Unit,IMU)是自主式测量传感器[1-2],适合应用在GPS受限且自主性要求高的组合导航领域,国外许多移动车载导航系统采用GPS/IMU组合导航,能达到较高的定位定向精度[3]。车载GPS/IMU组合导航通常采用速度和位置两种量测方案[4-5]。车辆在正常行驶过程中,仅有前向速度,无侧向和天向速度,根据此特性,可以建立车辆运行学约束方程辅助进行惯性导航,但缺少前向速度约束的运行学辅助导航是一种非完整约束的辅助导航[6]。车辆的瞬时运动可看成是以车辆中心上某点为圆心的圆周运动,可以将向心加速度引入运行学约束方程[7-8],构建完整的运动学约束方程,提高GPS/IMU组合导航系统导航定位精度。
1 引入向心加速度的车体运行约束
在车载惯导系统中选取地心坐标系i为惯性坐标系[9-10],东北天地理坐标系n为导航坐标系[11],载体坐标系为b,车辆运动坐标系为m,地球自转角速率为ωie。车辆正常行驶情况下,如不发生侧滑或跳跃等特殊情况,车辆在m系中的行驶速度除前向速度外均为零,得到轮式车辆的运动学约束方程[12-13]:
(1)
式中所示的运动学约束方程没有前向速度信息,因而以式(1)为观测变量的运行学辅助导航是一种非完整约束的辅助导航。惯导安装误差角度进行标定和补偿后为小角度,经初始对准后b系与m系可看作重合,车辆打滑、滑行等原因导致IMU输出错误信息时,可利用式(1)的约束方程辅助进行导航[14-15]。
车辆转向行驶时,车辆的瞬时运动可看成是以车辆中心上某点为圆心的圆周运动(车辆直线行驶时,车辆运动也可看成是半径无穷大的圆周运动)[16-17],圆心O位于b系的x轴上,如图1所示。

图1 圆周运动示意图
(2)
根据圆周运动理论得到车辆转向产生向心加速度ar表示为:
(3)
(4)

(5)
(6)
利用式(4)和式(6)构造向心加速度差值a0:
(7)
理想情况下a0=0,但是受干扰和噪声影响导致a0存在观测误差δa0:

(8)
式中,φ为姿态误差角、为加速度计误差、ε为陀螺误差。
2 完整运行学约束辅助的GPS/IMU组合建模
(9)
车辆运动学约束辅助实质上是m系速度约束,考虑IMU安装误差和杆臂误差,惯导解算速度在m上的分量可表示为:
(10)

将捷联惯导速度误差δVn、姿态误差角φn、位置误差δPn、加速计误差b、陀螺误差εb以及δa和μ扩充为捷联惯导误差状态,构建完整运行学约束辅助的捷联惯导状态变量为:
(11)
状态方程表示为:
(12)
其中,

观测方程[18-19]:
ZI=HIXI+nI。
(13)
其中,
nI为噪声矩阵、( )i表示矩阵第i行、[ ](i,j)表示矩阵第i行j列。
3 实验结果及分析
将光纤IMU安装轮式车辆后并进行标定。跑车场地选在学校操场跑到,采取重复跑圈,临时方向机动等运动方式进行跑车实验,跑车前进行10 min静基座初始对准,连续跑车超过1.5 h,最大速度60 km/h。
如图2所示,GPS测速和捷联惯导解算速度,可以看出在2 300~2 320 s时间段内里GPS输出明显增大而捷联惯导输出为0,这是车辆滑动引起的GPS错误输出,在2 620~2 625 s时间段内GPS输出为0,而惯性有输出,这是由于车辆下坡滑行引起的GPS错误输出,在GPS测速错误情况下,需采用运动学约束辅助惯性导航。
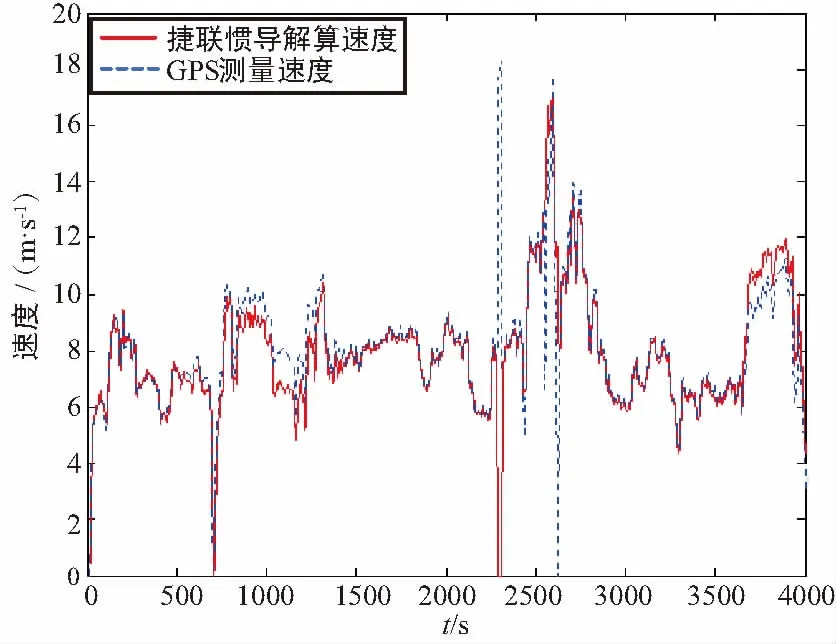
图2 捷联惯导和GPS量测速度
为验证向心加速度误差作为观测量的运动学约束方程有效性,取500 s数据进行分析。如图3所示,可看出车辆转向产生向心加速度ar、向心加速度差值ao的观测值受干扰影响较大。对观测数据进行平滑处理,分别得到0.05 s和0.2 s的平滑结果,如图4与图5所示,可看出平滑后的车辆转向产生向心加速度ar和IMU获取的向心加速度观测值基本相同,说明采用向心加速度观测误差作为观测量,进行轮式车辆运动学约束辅助惯性导航是可行的。
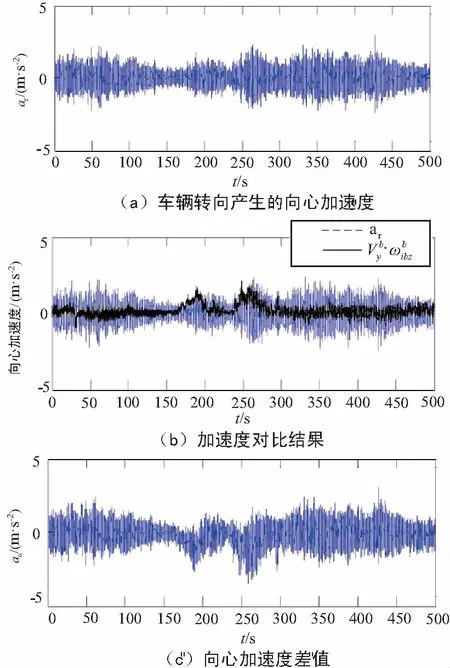
图3 向心加速度观测值
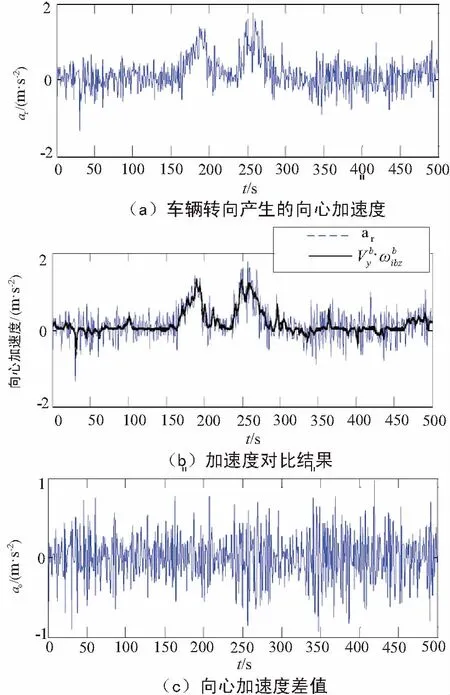
图4 0.05 s平滑的向心加速度观测值
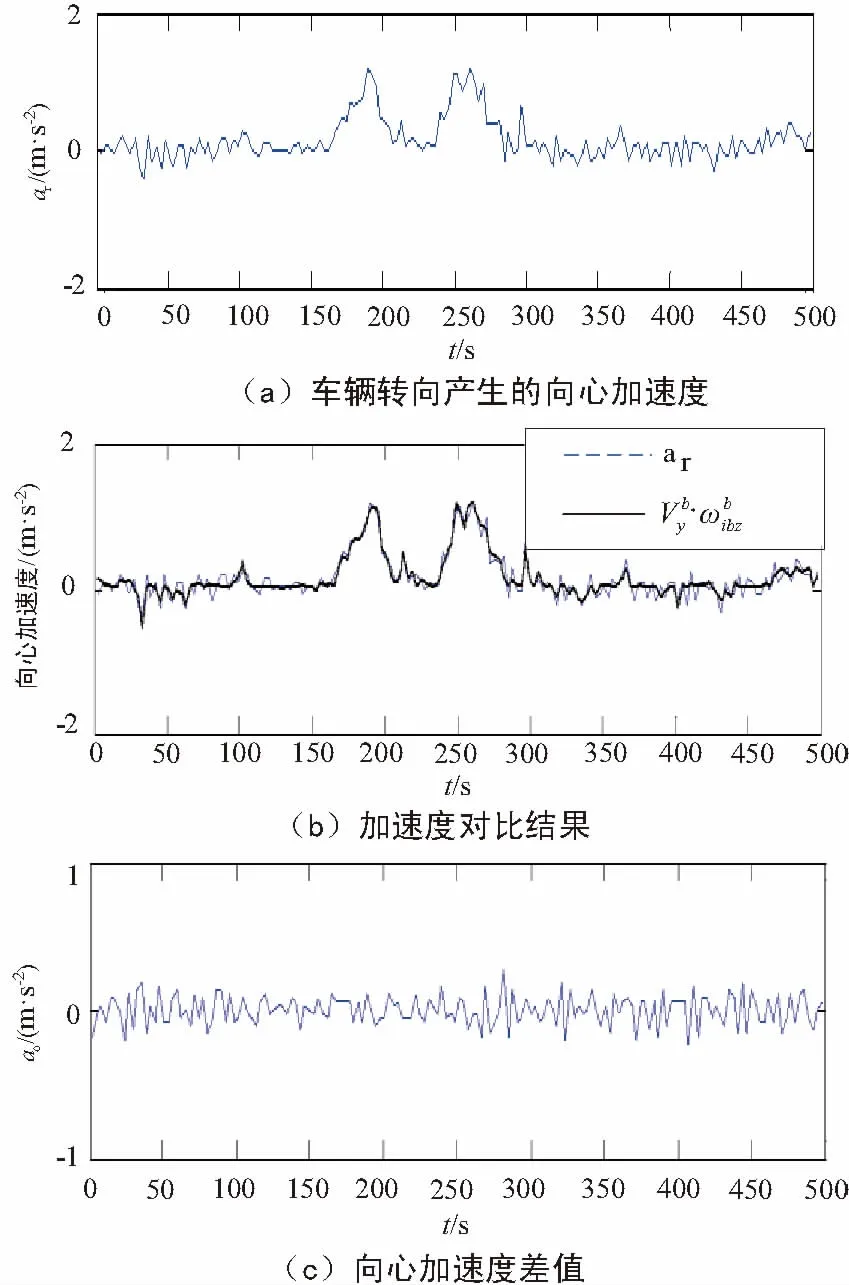
图5 0.2 s平滑后的向心加速度观测值
为进一步验证约束方案的有效性与优势,分别开展进行无约束和引入向心加速度观测误差的完整运动学约束条件下的跑车实验,定位结果如图6所示。
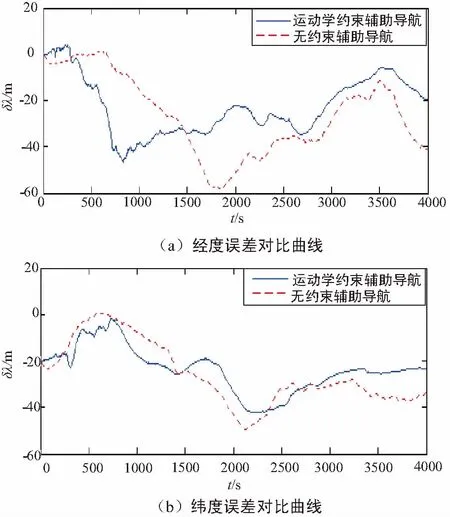
图6 水平定位误差
可以看出由于受GPS测速误差影响,无约束组合导航的经度定位误差约60 m,纬度定位误差约35 m;采用完整运动学约束的组合导航经度定位误差约40 m,纬度定位误差约20 m。采用完整运动学约束的组合导航精度明显优于无约束组合导航。
4 结束语
围绕车辆运动过程中由于侧滑等原因导致车载组合导航系统中的GPS获取速度存在误差,进而影响组合精度的问题,提出了一种运动状态约束条件下的组合方法,把向心加速度引入运行学约束方程,开展完整运行学约束辅助的GPS/IMU组合建模并建立测试环境。分别采用0.05 s和0.2 s对观测数据进行平滑处理后,车辆转向产生向心加速度和IMU获取的向心加速度观测值基本相同,验证了轮式车辆运动学约束辅助惯性导航的可行性;为进一步验证约束方案有效性与优势,开展无约束和引入向心加速度观测误差的完整运动学约束条件下的跑车实验,采用完整运动学约束的组合导航经度定位误差约40 m、纬度定位误差约20 m,明显优于无约束组合导航的经度误差60 m、纬度误差35 m的定位结果。该研究成果可为后续开展车载导航系统研发提供技术参考。
