矿井巷道三维建模方法探讨
2019-09-16卢星辅
卢星辅,肖 遥,胡 凯
(贵州省质安交通工程监控检测中心有限责任公司,贵州 贵阳 550000)
实体单元在理论上可以用于井下开采用各个构件的模拟。在矿井支护工程中,使用实体单元建模的效率低下,模型划分后的网格节点众多,求解代价巨大;并且有些结构如多层圆形骨架、金属掩护筒等,采用实体单元分析的精度并不理想。
因此,建模分析时常常是根据实际情况简化,采用“杆-梁-体”组合的方式建模。由于自由度不协调的问题,采用ansys分析时,需要处理各个单元之间的连接。本文讨论矿井支护体组合的实现方法。
1 Ansys中的实现方式
1.1 耦合与约束方程
对于不同单元之间的连接问题,常用的办法是自由度耦合或约束方程。自由度耦合是指:使两个或多个节点的自由度保持相同,耦合集中包含一个主自由度和多个从自由度,只有主自由度保存在矩阵中,而其他自由度则删除。而约束方程是把某个节点的自由度与其他一个或多个节点的自由度通过“方程”联系起来。约束方程可以代替自由度耦合,并且比自由度耦合更加通用。Ce、Cerig与Ceintf命令都是通过约束方程这种方式实现连接。
1.2 MPC多点接触算法
Multi-Point Constraints即多点约束方程。它使用内部生成的约束方程在接触面上保证变形协调,以一个节点的某几个自由度为标准值,将其它节点的指定自由度与这个标准值建立关系。多点约束采用接触单元实现,可以通过keyopt的设置处理一些特定的连接问题,比如刚性连接、铰接,除此之外还可用于连接非协调网格,施加远端载荷等。
2 支护体连接算例对比
支护体连接模型如图,在单元(图2中编号为“A7”面)中间施加向下的压力,模型如下所示:
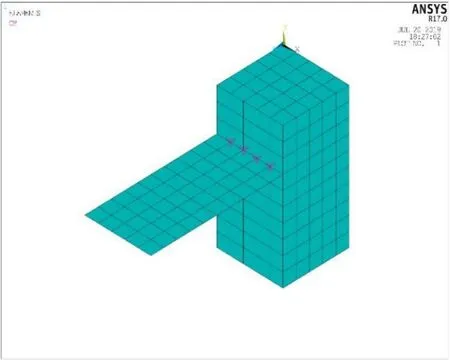
图1 算例模型网格示意图
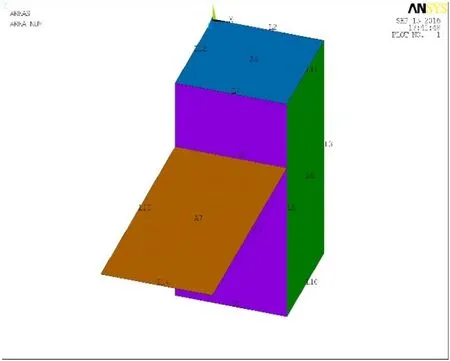
图2 算例几何模型示意图
2.1 支护体连接的实现方式
CP命令是约束方程(CE)最基本的实现方式。其主要是通过1对1的选出壳单元上的节点与对应位置体单元的节点,然后通过CP命令实现(cp,next,all,cnod(i),cnode(i))耦合自由度,从而达到连接的目的。本实现方式的难点在如何1对1的选出对应的节点。以下给出关键代码:

约束所有自由度(cp,next,all)后,运行求解后结果如图:
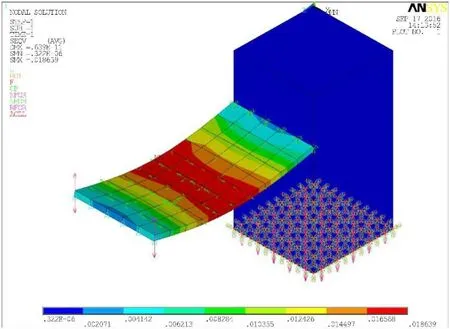
图3 CP约束所有自由度结果示意
2.2 支护体连接的Cerig实现方式
Cerig是通过生成刚性区域的方式实现连接,可以生成刚性面或刚性线,还可以施加远端约束。

图4 Cerig约束所有自由度(刚接)

图5 MPC约束所有自由度(刚接)
此例中,选择壳-体接触位置处的线(壳单元)与面(体单元)形成刚性区域,其结果与MPC连接结果几乎无差距。
2.3 壳-体连接的MPC实现方式
MPC连接的实现主要是通过接触单元实现的(target170,target175),通过在壳-梁接触的表面分别创建接触单元(esurf),然后调整接触对的keyopt值即可以实现不同自由度的约束从而实现连接。
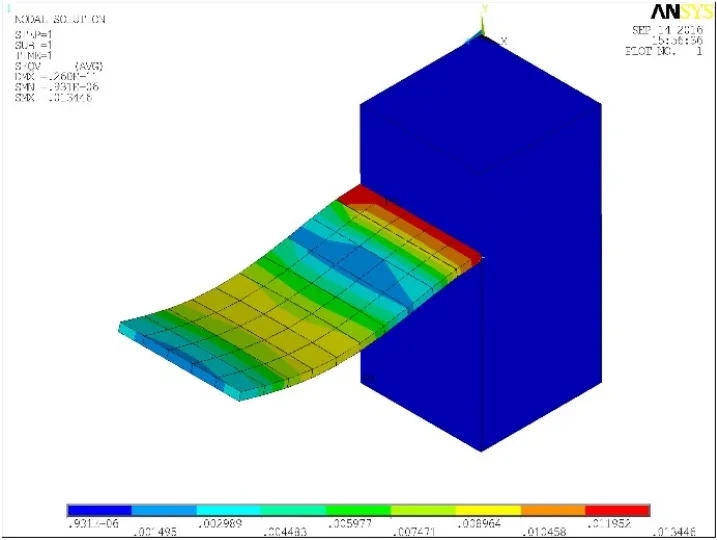
图6 MPC约束所有自由度(刚接)
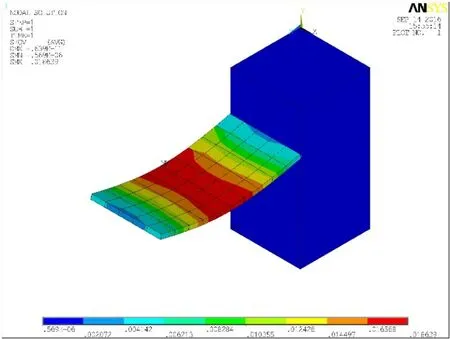
图7 MPC约束平动自由度(铰接)
此例中支撑体接触位置处的铰接和刚接才是真正符合实际情况。
3 结论
通过计算对比得出结论如下:
①cerig命令只能实现壳体的刚性连接。施加自由度约束时,刚性界面上的节点不能被约束,并且在进行网格划分时要求相连接单元网格对齐。②cp命令在约束平动自由度时的铰接结果与MPC铰接结果几乎一致,而约束所有自由度时的结果与铰接结果却无太大区别,这是因为CP命令选择的节点数目较少,耦合的自由度及刚度不足,所以不能达到刚接效果,且此方法也需要网格对齐。③MPC算法能实现刚性连接与铰接,不需要网格对齐,且结果与实际相符。
综上所述,在矿井巷道支护体结构中,简单的小模型可以采用耦合约束方程命令(Cp、Cerig、Ceintf)实现连接,而复杂的模型推荐采用使用接触单元处理,采用MPC算法在处理单元连接问题上是通用且不受限制的。
