基于Inpho的应急测绘数据快速处理方法
2018-08-20陈闽龙
王 薇,康 荔,2,蔡 磊,2,陈闽龙
(1.陕西省煤田物探测绘有限公司,陕西 西安 710054;2.国土资源部煤炭资源勘查与综合利用重点实验室,陕西 西安 710054)
0 引言
近年来,地质灾害频繁发生,为了在灾害发生后最大程度地降低灾害损失,准确迅速地制定救灾决策、提高灾害应急救援效率,首要任务就是获取灾区的位置、类型、规模、分布等信息,快速做出救援方针。但往往受到通信中断、道路破坏等因素影响使得人员无法第一时间进入灾区,此时无人机航空摄影测量应运而生。它通过对航拍数据进行处理,生成灾区的高分辨率正射影像,为相关部门的灾害决策工作提供重要依据。
和传统的航空摄影所展现出来的受外界环境影响强烈、作业耗时长、机动性差等相比,无人机低空遥感更适合进行危险区域的图像实时获取、土地变化监测、环境监测、应急指挥需求等方面应用,具有非常广阔的应用前景。无人机摄影测量具有如下优势:影像获取便捷、成本低、具有机动性和灵活性,安全性较高、受气候条件影响较小,任务周期短、时效性强。同时,也有着一些劣势存在,如拍摄姿态稳定性差、像片像幅小、像片倾角大、影像畸变较大等等一些不利因素,这些因素也给无人机数据处理带了了许多难点[1-3]。基于Inpho的无人机影像应急测绘处理方法解决了快速成像、快速处理和无人机摄影姿态稳定性差的问题。
1 Inpho系统介绍
Inpho是国内外知名的航空摄影测量软件之一,它可以为多数航空摄影测量项目提供一套完整的作业方案,包括空中三角测量,数字高程模型DEM的生产、数字正射影像DOM的生产和三维地物地貌特征的提取。
Inpho是集MATCH-AT空三加密模块、MATCH-T DSM点云提取模块、OrthoMaster正射纠正模块、OrthoVista镶嵌匀色模块等于一体的航摄数据处理系统。作为主流的航空摄影测量软件之一,它可以为所有的数字摄影测量提供处理方案,应用于众多航测项目中,取得了良好的效果,并得到各单位的一致认可。
在Inpho下进行无人机应急测绘数据处理,一般流程是在飞机作业结束之后,使用机载POS数据,原始航空影像,相机参数等新建工程,输入相关参数、空三解算、点云提取、正射影像生成并镶嵌匀色,最终成果输出[4-5]。
2 数据处理流程
Inpho摄影测量系统数据处理流程如图1所示。
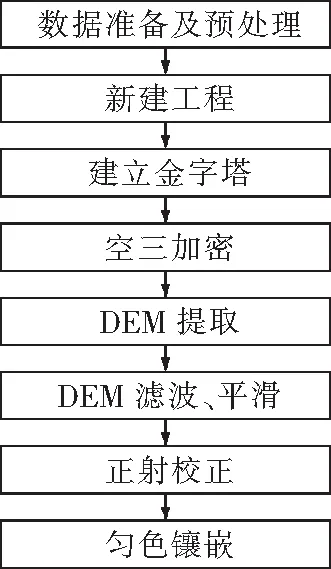
图1 Inpho摄影测量数据处理流程
2.1 数据准备及数据预处理
文中以某项目为例,探讨基于Inpho的无人机应急测绘数据处理方法。准备数据有:原始像片、相机参数以及POS数据。由于无人机低空航空摄影测量系统采用的是普通的非量测数码相机,原始像片的边缘都存在一定的畸变,所以在进行空三前需要对测区所有像片进行预处理,即通过对数码相机进行相机检校获得相应的畸变参数,然后对每张像片进行畸变校正,经过畸变校正后的像片才能用于空中三角测量。
2.2 工程创建
设置相机参数,包括扫描分辨率、相机焦距f、像片行列号及像主点坐标(X0,Y0),注意由于预处理已经对像片进行了畸变校正,所以此处的像主点坐标应设置为0。接下来导入畸变校正后的像片,导入POS数据,生成航带信息,空三项目创建成功。打开影像命令器,设置彩色RGB通道,建立影像金字塔。进入地理参考模块进行影像检查,逐条检查像片的排列顺序,若发现有排列错误的则要在工程编辑中对该条航带影像进行旋转。
2.3 空中三角测量
空中三角测量是利用地面控制点坐标及其在遥感影像中测定出的相应坐标,通过数学算法最小二乘法解算出未知点的平面坐标及高程,还原飞机在拍摄时的空中姿态,建立地形地貌的立体模型。Inpho中空中三角测量主要工作是进行影像连接点匹配和平差。连接点匹配是在旁向和航向不同的像片上匹配同名点,MATCH-AT空三加密模块处理过程自动、高效、便捷,自动匹配有效连接点的功能非常强大,若采用GPS/IMU辅助全自动连接点匹配功能,匹配出来的点更均匀准确,且对于纹理较差的水域,沙漠和森林等地方也都可以匹配到足够的连接点,有着无可比拟的优势。在自由网构建完成后则可进行自由网平差,并剔除粗差。
接着进行控制点转刺,自由网平差后Infho中便可以粗略判断控制点的位置,给出预测点位,结合外业提供的控制点标记,在控制点相对应的每张像片上都对该点进行转刺。控制点转刺需注意,首先在测区四角各刺一个点,然后进行约束平差,平差后的控制点预测会更精确,接着再均匀在测区内刺点,边刺点边平差,直至所有控制点都转刺完毕并通过约束平差。
但对于应急测绘,由于条件限制可能无法进入测区获取控制数据,快速获得测区的相对位置关系显得更为重要,则不需要转刺控制点[6]。
2.4 提取DSM点云数据
MATCH-T DSM点云提取模块是通过在恢复的立体模型中提取高密度的点云数据,生成数字地面模型DSM。DSM中包括自然地形地貌,人工建筑等相关信息。根据以往项目经验可知,如果不进行DSM处理直接进行正射纠正则生成的影像会有变形和拉花,特别是在较高建筑物上表现得更为明显。为了后期不出现这种情况,在DSM生成后需要选择合适的滤波算法进行滤波平滑处理,滤除人工建筑物等信息,对于结果精度要求较高时则有必要进行人工编辑DSM。图2和图3分别是滤波平滑处理前后的DSM。

图2 滤波前生成的DSM
图3 滤波后生成的DSM
2.5 影像正射校正
数字正射影像DOM是利用数字高程模型对无人机像片经过逐个像元的投影差改正生成的具有一定几何精度的平面影像图。DOM具有精度高、信息量丰富、直观逼真、获取快捷等优点。
在Inpho中使用OrthoMaster模块对无人机航摄像片进行正射纠正。在滤波处理后的高精度DSM基础上通过批量对单张像片进行正射校正,得到测区内正射影像单片。图4、图5对比了滤波前后生成的正射影像图。通过对比明显发现,在平滑滤波处理后的DSM′基础上生成的正射影像中房屋变形明显变小,精度更高。

图4 DSM滤波前生成的DOM

图5 DSM滤波后生成的DOM
2.6 影像镶嵌
OrthoVista模块是通过先进的影像处理技术及全自动拼接线查找算法对不同来源的正射影像进行处理,生成整幅颜色均衡、衔接紧密的镶嵌图。在Inpho中,利用OrthoVista模块对上面生成的单片正射影像进行镶嵌,在进行镶嵌时软件内部会利用算法自动对单片正射影像进行匀光匀色,拼接出来的影像不会产生航带间明显的拼接痕迹。拼接后的正射影像如果有拼接错位的情况可以在软件里进行拼接线的调整,也可以利用单片正射影像在AdobePhotoshop下进行修补,最终生成该区域的一整幅高精度正射影像图。
3 结论
(1)根据灾害应急及无人机遥感影像的特点,对Inpho软件下无人机航空摄影数据快速处理流程进行了方法改进,在保证无人机DOM精度前提下,提高影像处理效率。
(2)Inpho具有强大的连接点匹配功能,匹配点精度高且分布均匀,对于纹理相对较弱的区域也能匹配出充足的连接点。
(3)Inpho在处理无人机应急测绘数据具有一定的优势。在Inpho中,整个处理过程批量处理较多,人工干预极少,大大提高应急测绘成果生产的效率。
(4)优化后的DSM极大地提高了DOM质量。对DSM经过滤波和平滑处理后,生成的DOM建筑物变形明显减小,大大提升了DOM的质量和精度。
