基于HMM和SVM级联算法的驾驶意图识别∗
2018-08-18刘志强吴雪刚
刘志强,吴雪刚,倪 捷,张 腾
前言
随着我国道路运输行业的快速发展和机动车保有量的急剧增长,交通安全事故频发导致财产损失和人员伤亡给人们的生产生活带来了严重影响[1]。先进的驾驶员辅助系统能够显著提高驾驶员行车安全性,然而这些系统有些未考虑对驾驶员行为意图和特性的辨识以实现辅助系统对驾驶员的自适应和驾驶员个性化驾驶[2],导致辅助系统的激活与驾驶员意图相悖,给驾驶员造成心理压力,降低了驾驶员对辅助系统的认同感。因此,在驾驶员辅助系统进一步开发中开展驾驶员意图识别研究具有实际应用价值。
研究表明,驾驶员的驾驶意图是一个多维结构,单一的特征指标并不能满足驾驶意图的判断[3]。国内外针对驾驶员驾驶意图识别研究中其参数的选择绝大部分是基于单独的自车运动状态或车-路系统建立单一学习模型[4-6]。部分研究人员建立了多学习模型辨识驾驶意图,但此类研究也仅考虑在车道保持和车道变换阶段驾驶员的生理或心理参数的变化[7-9]。实际的驾驶过程是一个由人-车-路组成的复杂的交通系统[10-11],单一的识别模型导致驾驶意图误警率高。
隐马尔可夫算法能够分析时间序列的动态信号,根据相邻状态间的关系完成模式识别,更大程度反映类别间的相似性而类别的差异性则被忽略。支持向量机算法通过将低维空间线性不可分的样本映射至高维空间中,以尽可能大的欧氏距离将相似的样本分隔开,更大程度地反映了类别间的差异性。据此,本文中提出了一种基于HMM和SVM级联算法考虑人-车-路特征参数的驾驶员意图识别方法,将隐马尔可夫动态建模能力和支持向量机模式分类能力结合,同时发挥两种分类器的优势,提高整个双层算法对驾驶意图的识别能力。
1 实验方案
1.1 实验平台
考虑到在模拟驾驶仪中开展仿真实验,可根据实验要求随意修改车辆和道路环境的参数配置,准确采集车辆多种动态参数的同时不担心因操作不当而引发危险事故,有效降低实验采集过程中驾驶员的心理负担。选用6自由度SCANER II驾驶模拟器和Smart-eyes眼动仪作为主要实验设备,如图 1所示。

图1 模拟驾驶仪与眼动仪系统
1.2 实验场景设计
按照实验要求,在驾驶模拟器视景系统中设计双向六车道,车道宽3.5m,总长度约90km的高速公路场景。同时,为使行车环境与实际过程一致,在道路上设置适宜车流量。其中主要设置两类辅助车辆,当自车行驶至与所设置的辅助车辆距离500m时,辅助车辆被自动激活。第一类辅助车辆平均车速设置为60km/h,车速变化遵循方差为20km/h的高斯分布;第二类辅助车辆的平均车速为90km/h,其车速变化遵循方差为30km/h的高斯分布。
1.3 实验人员
以自愿方式招募8男4女共12名驾驶员作为受试对象。受试者满足以下条件:持有驾驶证、视力良好、性格稳定、无不良驾驶记录。为便于实验有序开展和有效提高后期样本筛选的效率,实验配备1名记录员,其主要工作是观察驾驶员的状态,并记录驾驶员不同任务下的操作时刻。
1.4 实验过程
本文中规定,处于驾驶模拟器环境中的驾驶员主要有 4类驾驶意图:车道跟驰(CF),左变道(LCL),右变道(LCR)和超车(OT)。实验中,驾驶模拟器主控机相应的模块会同步采集车辆纵向加速度、转向盘转角、车辆与车道线距离、制动踏板行程、加速踏板行程等运行状态参数,同时采用Smart-eyes眼动仪系统追踪驾驶员的眼睛和头部运动。
2 样本筛选
若能提早1s察觉到事故危险并采取相应正确措施,很多交通事故都可以避免[12]。图2为某次换道过程的车辆运行轨迹,其中p点为车辆行驶轨迹和车道线交点,以往的多数研究通常对p点前某时窗内信息进行研究,希望在车辆越过车道线1s前就能辨识出换道意图,考虑到国内外的研究较为普遍地将时间窗口取为3s左右[13],故选取p点前1s外时间窗口T内的信息作为研究对象,即截取q点前3s内的特征量数据,同样随机截取3s内车道保持阶段的特征量数据。
结合研究需求共筛选了1 150组样本,其中CF样本285组,LCR样本285组,LCL样本290组和OT样本290组。为提高模型的分类准确率和确保有效检验效果,用于模型训练和模型验证的样本大致按照2∶1的原则分配。
3 驾驶意图特征参数选取
对筛选样本中所涉及的参数数据进行对比分析,排除部分差异性较小的参数。经独立样本T检验(显著性差异α=0.05)后,结合指标参量选择时应遵循易量化、全面性和相互独立性的原则确定驾驶员特征参数。
3.1 驾驶员参数
视觉扫描是驾驶员搜索外界信息的主要途径,在驾驶过程中驾驶员获取的道路环境信息有90%以上来自视觉[14]。
对Smart-eyes眼动仪系统采集的多次全过程驾驶中驾驶员视线点区域进行K-means聚类划分,见图3,而后在确定各区域范围的基础上统计筛选驾驶员面对不同任务时的典型视觉特征变化规律,见图4,其中图4(a)中当驾驶员处于右变道(LCR)意图时,可认为对左侧后视镜注视次数为零。

图3 驾驶员兴趣区域划分结果
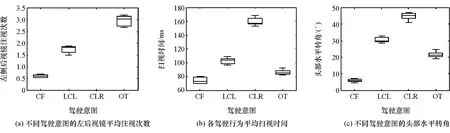
图4 不同驾驶意图下驾驶员视觉参数箱型图
3.2 车-路参数
行驶过程中,模拟驾驶器CAN系统可读取出车辆各类典型的运行参数信息。纵向加速度反映驾驶员对后续车速的预期值。转向盘转角作为实现变道意图的直接输入,驾驶员在各意图阶段均需不断调整转向盘以保证车辆安全行驶。车辆与车道中心线距离作为自车相对于车道的位置变化,反映了驾驶员对车辆横向位置的掌控能力,上述“车-路”参数能较好表征驾驶员的驾驶意图,变化规律统计见图5。

图5 不同驾驶意图下“车-路”参数箱型图
结合图4和图5中参数差异性的分析,最终确定以左后视镜平均注视次数、单次平均扫视时间、单次平均头部水平转角、转向盘转角、纵向加速度和自车与车道中心线距离共6个参数作为意图识别算法指标量。
4 HMM和SVM级联算法识别驾驶意图基本方法
传统上HMM算法的输出完全作为SVM的输入建立HMM-SVM混合模型开展模式识别的分类负担较大,计算时间较长且并未充分发挥二者的优势,本文中所建立改进的HMM和SVM级联算法如图6所示。将待辨识驾驶意图对应的指标参数样本导入第一层HMM中确定其能识别的意图。将第一层HMM中识别率较低的易混淆的意图作为与待辨识意图较为相似的类别,形成候选集,再由第二层SVM在候选模式中对待辨识意图作最后决策,以期达到提高驾驶员驾驶意图识别率的目的。

图6 HMM和SVM级联算法识别驾驶意图流程
4.1 隐马尔可夫算法(HMM)
隐马尔可夫模型作为一个双随机过程,由两部分组成:马尔可夫链和一般随机过程。前者采用转移概率描述状态的转移,后者采用观察值概率描述状态和观察序列间的关系[15]。一个HMM模型可以用θ=[P0,A,B]来描述,将其用于驾驶意图识别,关键问题是解决HMM模型的训练和识别问题。
Q=(Q1,Q2,Q3,Q4)表示 4 种隐藏的驾驶意图;ν=(ν1,ν2,ν3,ν4,ν5,ν6)表示可观察的驾驶行为序列;A=[aij]表示从意图Qi到意图Qj的转移矩阵;B=[Bjk]表示从意图 Qj产生驾驶行为νk的产生矩阵。
图7为基于隐马尔可夫模型的驾驶意图辨识原理,采用前向-后向算法对给定训练数据后获得的隐马尔可夫模型参数进行优化。由于初始概率条件P0和驾驶意图转移矩阵A的初始值的选择对系统的影响不大,对比实验效果后,确定采用4状态6高斯过程HMM模型。假定均匀选取初始状态概率P0和A的初值,采用K-means聚类求解B的初始值。

图7 基于HMM算法的意图识别基本原理
前向-后向算法获得HMM参数 θ的重估公式为

在产生换道行为序列ν条件下,从驾驶行为Qi(t-1)转移到Qj(t)的概率γij为

式中l为长为T的驾驶意图序列的标记。根据新旧隐马尔可夫模型参数间的函数关系反复迭代计算aij和bjk,至其收敛为止。最终获得驾驶行为产生矩阵B=[bjk]。
驾驶意图识别时,采用viterbi算法求出模型参数θi对输出驾驶行为序列ν的输出概率P(ν|θi),然后选择所有模型中的输出概率最大的作为未知意图的识别结果,即

4.2 支持向量机(SVM)
SVM作为一种基于结构风险最小化原则的学习理论,通过在高维空间寻找一个超平面作为两类的分隔,以保证最小的分类错误率[16],以解决小样本、非线性和二分类的模式识别问题。用SVM实现驾驶意图分类,首先要将原始空间中线性不可分驾驶意图参数通过式(7)的 RBF函数映射到高维空间:

将求解最优分类面转化为求解驾驶意图的最优决策函数:

通过式(9)获得a∗i和 b。
将第一层HMM算法中n种易混淆驾驶意图两两组合,构建C2n个分类器。使用各易混淆驾驶意图对应的训练集数据训练SVM分类模型。SVM通过将低维空间中线性不可分的易混淆的驾驶意图样本映射到可分的高维空间中,最大程度地表现各易混淆意图间的差异性。
5 模型训练与仿真分析
5.1 样本降噪预处理
考虑到由于噪声和传感器自身性能的影响,会导致部分车载传感器实验数据的关联性降低,为保证驾驶意图模型识别精度,须对所采集的数据进行卡尔曼滤波处理[17]。纵向加速度和转向盘转角滤波处理如图8所示。
5.2 HMM模型训练结果
选择将数据筛选后的765组驾驶意图导入第一层HMM模型中进行参数θ的优化。利用4.1节中所述HMM模型的前向-后向算法,获得左变道意图HMM的描述参数θLCL:

其中P0=[0.2 0.2 0.2 0.2 0.2]T

进而,可依此方法求解其余3类驾驶意图HMM的模型参数。

图8 车载传感器参数的滤波处理
5.3 HMM仿真分析
将部分样本导入第一层HMM算法,似然估计值越大,表明观察序列与该模型的匹配程度越高,最大似然估计值所对应的模型便是利用HMM分类模型得出的当前驾驶员驾驶意图,表1中加粗的数值即为识别结果。

表1 各驾驶行为样本HMM识别结果
基于HMM模型对剩余的750组驾驶意图检验样本的识别结果如表2所示。
从表2中可以看出,基于第一层HMM算法的LCL和OT两种驾驶意图的识别率较低,在进一步的研究中可将其作为易混淆意图导入第二层SVM进行意图分类。

表2 检验样本的HMM识别结果
5.4 SVM模型训练与仿真分析
将左换道意图和超车意图对应的387组训练样本导入第二层SVM算法中,结果如图9所示。采用网格寻优算法获得最优参数C=1.14和σ=1.07,对应最佳参数的SVM模型识别准确率为96.58%。

图9 基于SVM辨识混淆意图的参数寻优结果
将超车意图和左换道意图对应的193组验证样本导入训练的SVM模型进行意图识别。易混淆意图识别结果如表3所示。

表3 易混淆驾驶意图SVM识别结果
基于HMM和SVM级联算法的驾驶意图的平均识别率达95.84%,明显高于HMM或SVM单一学习模型。需要指出的是,对于非易混淆意图,均直接利用第一层HMM算法完成识别,因此HMM和HMMSVM级联模型对CF和LCR两种意图的识别率相差不大,却能减轻第二层SVM的分类负担。
5.5 仿真时间估算
通过在算法的开头和结尾分别设置tic和toc函数完成单个驾驶意图识别的仿真时间计算,结果如表4所示。

表4 各种辨识模型识别时间
一般情况下,驾驶员处理突发事件的反应时间为0.2~0.4s[18]。本文中所提出的HMM和SVM级联算法明显能够满足要求。
5.6 驾驶意图在线识别
基于本文中所建立的级联算法进行驾驶意图的在线识别,识别结果见图10。

图10 基于HMM和SVM级联算法在线识别意图
本文中所提出的HMM和SVM级联算法识别驾驶意图,综合了HMM算法和SVM的优势,弥补了HMM中只能根据最大似然估计作为输出,当几种意图的最大似然估计值相近时造成意图识别错误率高的缺点。通过HMM排除能够识别的意图,将易混淆意图对应的驾驶样本导入SVM,依据识别准确率设置投票表决算法完成意图分类。
6 结论
(1)确定了“人-车-路”交通系统中可作为驾驶意图识别指标共6个参数,弥补了目前国内外针对驾驶意图简单采取车-路系统参数的不足的同时扩展了待识别意图种类。
(2)基于所提出的HMM和SVM级联算法识别驾驶意图的平均准确率达95.84%,较HMM或SVM单一模型高,单次意图识别时间为0.017s,满足驾驶员处理突发事件的反应时间要求。
