指数和线性参数化的轮胎-路面纵向附着条件实时估计方法
2018-08-17过学迅裴晓飞
熊 喆 过学迅 裴晓飞 张 杰
1.武汉理工大学现代汽车零部件技术湖北省重点实验室,武汉,430070 2.万向集团技术中心,杭州,311200
0 引言
轮胎-路面的纵向附着特性通常由以车轮滑移率λ为横坐标、附着系数μ为纵坐标的μ-λ曲线表示,曲线呈非线性且包含单一极大值。该极大值对应的纵坐标为轮胎可利用的峰值附着系数μp,横坐标为最优滑移率λp。峰值附着系数为自适应巡航控制(ACC)、驾驶辅助系统(ADAS)和再生制动分配控制等功能提供必要信息,最优滑移率则是防抱死制动系统(ABS)缩短制动距离的关键控制目标。在车辆主动安全的研究领域,在各种提高车辆稳定性和缩短制动距离的先进控制方法中,大多以该峰值点已知为必要条件,因此峰值点的估计方法一直是研究热点之一。
轮胎-路面附着特性估算方法大致分为两类,即基于原因(cause-based)和基于结果(effectbased)[1]。由车辆参数响应和数学模型反向推导附着特性是基于结果方法中的一种。相较于其他方法,这种方法无需加装特殊传感器,故常常成为主机厂的首选方法。一般认为,在小滑移率(≤5%)范围,μ-λ曲线斜率值(纵滑刚度系数)与轮胎参数主要相关,与路面类型次要相关。在使用常规传感器的条件下,小滑移率的轻度制动工况很难准确预测峰值附着系数及对应的最优滑移率[2]。通常的方法是对小滑移率工况下的μ-λ散点进行直线拟合,通过斜率值来大致区分高、低附着路面[3]。当出现较大滑移率的制动工况时,μ值会越过峰值点并进入非线性区域,此时需要引入合适的估计方法获取峰值点坐标。本文提出一种指数和(exponential sums,ES)模型线性化的轮胎-路面纵向附着条件实时估计方法。
1 纵向制动过程的车辆参数响应
1.1 轮胎-路面纵向附着力
电动汽车的制动系统正以“线控”为发展方向,无论是电子液压制动系统还是电子机械制动系统,配合再生制动系统,都具备制动力矩可测的特点,从而为附着条件的估计提供了很大帮助。此外,为最大化回收能量,许多再生制动分配策略[4]倾向于最大化地利用再生制动轮的附着系数,使得再生制动轮优先趋于抱死,以CarSim软件内的E-class Sedan车身参数为例,绘制的典型制动分配线如图1所示。图中,z为制动强度。其中,最大化能量回收分配策略以I曲线(理想分配线)、f线组(前轮抱死线)和ECE法规线为参考线,规划前后轴制动力分配线,表示为OABCD线段。其基本思想是:在保证车轮运行于线性稳定区间的前提下,尽可能将需求制动力分配给再生制动轮(此处为前轮)。OA线段所处的低强度制动工况下,需求制动力全部分配给前轮;AB曲线位于ECE曲线上方,垂直距离取决于设计者的余量系数;BC线段位于当前路面峰值附着系数对应的f线左侧,距离也取决于余量系数。CD曲线与I曲线重合,此时前后轮有相近的滑移率和附着系数利用率。

图1 典型制动分配线Fig.1 Typical brake force distribution curves
明显地,当路面附着系数对应的f线处于BC线左侧时,重度制动情况下可能导致前轮抱死而后轮未能完全利用附着力的情况发生。理想方案是实时获取路面附着条件并及时调整BC线段位置。本文以电动汽车前轮为具体分析对象,对轮胎-路面纵向附着力进行研究,研究中暂不考虑电机再生制动的功能。
附着系数μ的定义为

式中,Fx为车轮受到的纵向附着力;Fz为轮胎受到的法向载荷。

式中,I为车轮及联动部件的合惯量;ω为轮速;Td为车轮所受驱动力矩;Tb为制动器提供的力矩;Tr为滚阻偶矩;reff为车轮有效滚动半径;rw为车轮静态负载半径;kw为轮胎弹簧刚度。
由车辆纵向运动时车轮的力矩平衡可得
对于燃油车辆,制动过程中的驱动力矩难以估计,式(2)作了视驱动力矩为零的过度简化处理。该简化的缺陷在于,无论处于AT(自动变速器)或MT(手动变速器)挂挡状态下的制动,驱动力矩对车轮运动都会有一定的影响,尤其在低附着系数路面,忽略驱动力矩将对附着条件估计带来显著的误差。若不考虑式(2)中的驱动力矩,由CarSim输出值计算的估计结果如图2所示,估计值与真值有着较大的偏差。
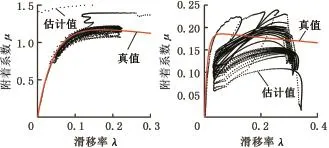
图2 燃油汽车的附着条件估计结果(不考虑驱动力矩)Fig.2 Estimated results of adhesion of a fuel vehicle(without considering drive torque)
对于传动系统结构简单的电动车辆,驱动/再生制动力矩值可由电机ECU直接提供,从而有效降低因驱动力矩估计不准导致的误差,因此电动车的优势也体现在:使用式(2)的简单模型依然能够得到准确度较高的附着力估计值。
1.2 滚阻偶矩
滚动阻力系数的精确值通常由转鼓试验获得,或由滑行试验获得滚阻风阻系数[5]。考虑到大滑移率制动工况下的滚阻占比较小,此处视系数为已知,则滚阻偶矩表示为

式中,κrc、κrv分别为滚动阻力系数的常数系数和速度系数,取 4×10-3和 2.5×10-5。
1.3 车轮载荷估计
假设车辆行驶于平坦硬路面,且车辆重心位于xy平面的中轴线上。通过求解制动时前后轴载荷力和力矩平衡方程可得左前轮载荷Fz_L1的简化估计表达式:

式中,M为整车质量;g为重力加速度;Fz1为前轴载荷;hg为车辆重心高度;L为轴距;L2为重心至后轴的水平距离。
变量M、L2、hg会随车辆负载状态而改变,此处假设变量可由相关估计方法获得[6],并在后文的仿真和试验中视之为恒定参数。
1.4 滑移率计算
制动工况下的瞬时滑移率定义为

当滚动的充气轮胎的某一系统变量(侧偏角、外倾角或纵向滑移率)发生变化时,轮胎进入一种非平衡状态,侧向和纵向附着力都会经历一次短暂的改变,直至从非平衡状态过渡至平衡态[7]。因为轮胎的偏转或形变需要一定时间,随后才能达到稳态条件。
纵向附着条件由载荷、滑移率和纵向力三个变量决定。其中,载荷不受轮胎弛豫现象的影响;瞬时滑移率由传感器信号及相应算法估计获得,得到的是一个针对轮毂而非轮胎的非弛豫值;纵向附着力的估计是从车轮动力学的角度出发,由车轮运动反推,因而得到的是一个弛豫值。在建立滑移率与轮胎摩擦力的模型时,应考虑弛豫现象并进行时域统一。轮胎弛豫模型的滑移率表示为[8]

式中,λL为弛豫滑移率;lLag为轮胎弛豫长度,取55 mm。
1.5 ABS控制器
ABS控制器结构种类繁多,为不失一般性,本文的仿真试验使用常规有限状态机(FSM)ABS控制器,其控制逻辑如图3所示。图中,q为状态编号;Tbmin、Tbmax、λmin、λmax分别为μ-λ平面上4个自定义滑模面;U代表ABS控制器信号对应的EHB制动力矩增压、减压、保压速率,kin、kde分别为增压、减压速率值,由文献[9]获得。
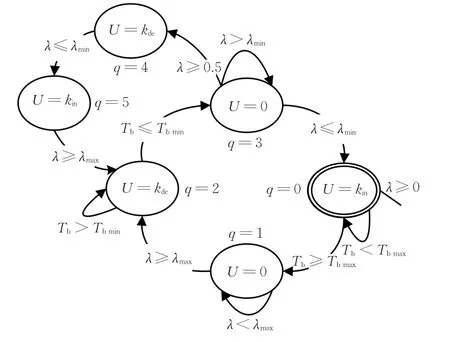
图3 离散有限状态机ABS控制器Fig.3 FSM ABS controller
2 附着特性曲线辨识
2.1 Burckhardt模型
Burckhardt摩擦模型的准静态形式仅含3个系数,是表达轮胎-路面附着特性的经验模型之一,其表达式为

式中,c1、c2、c3为拟合系数。
典型路面的系数值如表1所示。
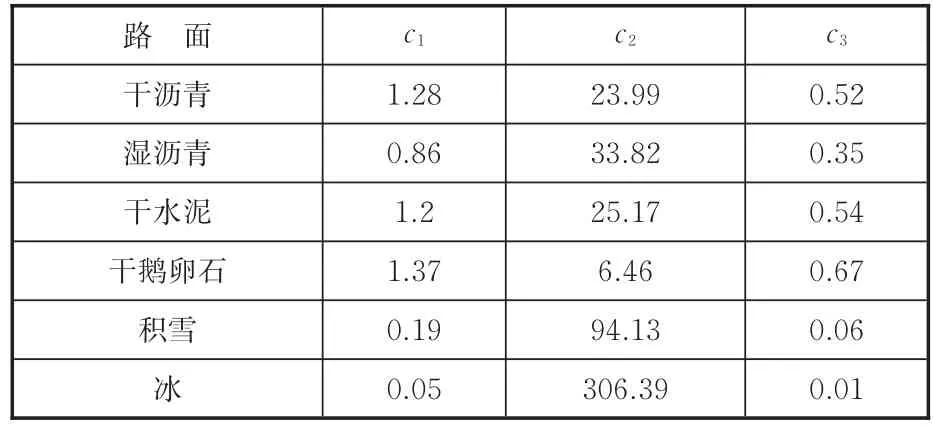
表1 Burckhardt模型典型路面系数Tab.1 Coefficients of Burckhardt model
需要指出的是,Burckhardt模型能够表达无数种附着条件,包括但不限于表1中所列的6种路面。由式(8)可知,该模型仅对路面进行了描述,对于轮胎-路面附着特性的另一要素“轮胎”则未涵盖。这也是该模型与魔术公式的主要区别之一。即使是在同一种路面,在温度、轮胎(胎宽、胎压、纹路等)、外倾角等参数变化的情况下,曲线形状和拟合系数仍有发生较大变化的可能(例如,F1赛车使用的热熔胎在干沥青路面可获得大于2的峰值附着系数)。另一个重点是,Burckhardt模型包含一个指数非线性项e-c2λ,难以设计出符合本文实时性要求的非线性拟合算法。最合适的解决方案是设计合理的线性化近似,再以计算量较小的最小二乘拟合算法进行辨识。
2.2 Kiencke线性化
Kiencke[10]提出了一种针对 Burckhardt模型的线性化方法,该线性化方法的前提是,假设所有路面特性曲线的初始斜率μ′(0)为一个定值,则Burckhardt模型可近似线性化为

式中,a1、a2为待估参数。
令一个中间变量y(t)=μ′(0)λ(t)-μ(t),则有:

那么类似地,可用遗忘因子递推最小二乘方法辨识参数a1、a2,式(10)可表示为

式中,ξ为噪声。

式中,aj(j=1,2,…,m)为待估系数,aj∈R;bj为预设参数,bj∈ R。
当确定函数定义域,并根据函数性质和误差要求给定m值和bj时,可将非线性函数近似线性化。需要指出的是,由于式(12)中的非线性项-c1e-c2λ已经是指数形式,因此指数和模型对该项有较好的逼近效果[11]。将式(13)模型结构替换式(12)的非线性项,并利用μ(λ)曲线始于坐标原点的性质,即令μ(0)=0,从而式(12)可表示为

由一阶偏微分小于0和二阶偏微分等于0两个条件求解得到极大值点纵横坐标(即最优滑移率、附着系数峰值)分别为
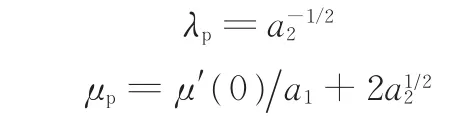
Keincke模型中的初始斜率μ′(0)为纵滑刚度。纵滑刚度一般只与轮胎参数相关,与路面条件无关,因此该模型的缺点在于,当轮胎参数发生改变,准确性会显著降低。
2.3 指数和线性化方法
式(8)展开:

指数和线性化属于非线性逼近理论的方法之一,对于某非线性函数f(x),其指数和逼近模型为
式中,ai为待估系数,i=1,2,…,n;bi为预设参数,i=1,2,…,n-1。
从而辨识模型表示为
在利用最小二乘辨识算法得到θ值后,对式(14)进行一阶和二阶偏微分,则极大值点μp(λp)为以下方程的解:
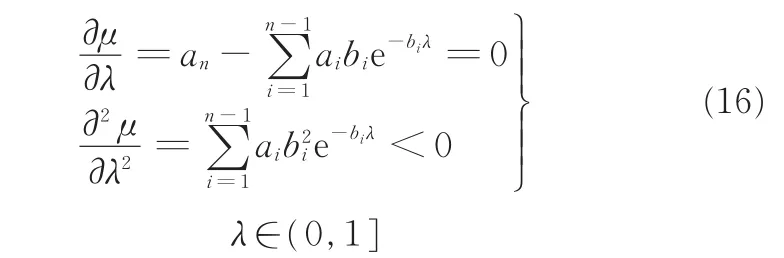

考虑到参数bi用于拟合c2,此处参考标准Burckhardt模型中的c2值作为bi的取值范围,排除冰面路段c2=300的极端情况,取 bi∈[1,100]。考虑到拟合参数的数量过多,会导致计算量增多,数量过少则导致拟合精度降低。为兼顾两者,此处取n=5,取b1=4,b2=40,b3=70,b4=100。按此取值对标准Burckhardt模型曲线进行离线拟合,结果如表2所示,由和方差(SSE)结果可知拟合程度较高。进一步地,如表3所示,相较于其他使用指数和方法拟合的结果,本文方法经参数优化和结构简化,在降低待估参数数量的同时,精确度也得到了提升。
由式(16)可知,与Burckhardt模型有极大值解析解不同,式(16)中一阶微分方程的表达式虽为显式,但为一个含高阶指数多项式的超越方程,无法给出解析解,只能求数值解。由于对λp解的精度要求不高,故求解步长取0.001即可,同时以μ(0)=0为初值,0~0.5为 λp范围。对于基于MATLAB的仿真而言,可用的求解方法包括:①使用fsolve函数对式(16)所示的一阶微分方程求取数值解;②使用findpeaks函数获取如式(14)所示曲线的极大值坐标,输出结果为函数极大值点的纵横坐标对应的两组向量,向量长度取决于极大值点的数量。在本文仿真中,使用了上述第二种方法编写求解程序,当解出多个极大值点时,取横坐标最靠近0的解,函数框架表示为
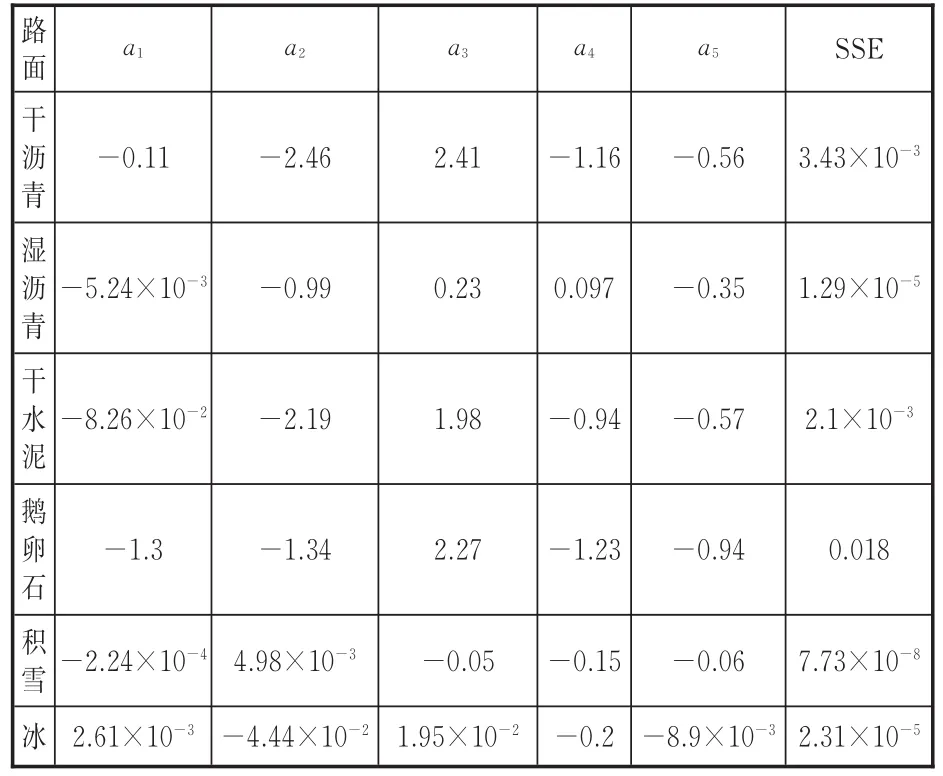
表2 Burckhardt模型的指数和线性化拟合结果Tab.2 Fitting results of Burckhardt models by ES linear parameterization

表3 两种线性化方法的拟合结果对比(湿沥青)Tab.3 Contrast of linear methods(wet asphalt)
2.4 遗忘因子递推最小二乘(FFRLS)算法
采用遗忘因子最小二乘算法,递推公式为

设置初始化参数P(0)=10I,在本文中,I为5阶单位阵。参数初值ˆ(0)和遗忘因子λf的取值将于仿真试验部分讨论。
3 仿真与硬件在环(HiL)试验
基于前文所述思路,搭建了基于MATLAB/Simulink和CarSim的联合仿真平台。Simulink内的数据流如图4所示,其中,i=L1,R1,L2,R2,分别指前轴左右车轮和后轴左右车轮。CarSim模块包含整车参数、制动器参数和路面参数的设置,除此之外,包括制动器液压模型、各参数估计算法、拟合算法和极大值求解算法在内的模块均在Simulink中编写。为更接近真实车辆,对估计的μ和λL结果加入白噪声,取=0.012,=0.0022。
分步式硬件在环试验用于验证该算法的实时性。CarSim仿真得到的制动过程各参数,以离线数据的形式发送至作为虚拟估计器的dSPACE,流程如图5所示。dSPACE返回的估计结果与仿真估计结果相同,但与仿真的较长耗时相比,HiL试验达到了实时性的要求。
图4 联合仿真的计算框架Fig.4 Diagram of co-simulation
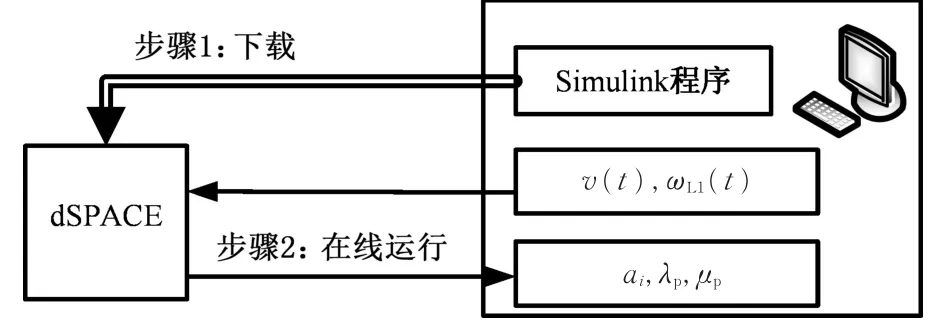
图5 硬件在环试验框架Fig.5 Diagram of HiL
3.1 单一路面试验
本节所述仿真试验的目的在于测试不同识别参数下的单一路面的识别结果,通过比较结果进而分析、优化ˆ(0)和λf取值。
θˆ(0)的取值分为两种情况,第一种情况是在车辆点火(控制器初始化)时,由设计者预设一个初值,该值会影响第一次估计的速度。第二种情况是行车过程中,基于小滑移率工况下的散点统计斜率估计法的结果,这种情况下无论是高/低附着系数初值进入低/高附着系数路面,都将考验估计器应对路面变化时的稳定性和收敛速度。
设初始为低附着系数路面(湿沥青),并在高附着系数路面进行制动。取表2的离线拟合数据,峰值点纵横坐标的估计结果如图6所示。明显地,当λf=0.95时,无论是μp还是λp的估计结果都出现了剧烈的振荡,说明该遗忘因子值下的遗忘速度过快,参数和解的变化更剧烈,一旦峰值点横坐标大于1,则返回(μp,λp)=(0,0),由图可知0.2~0.4 s处出现了多次无解的情况。在其余λf取值下的μp均能进入小误差范围,但λf取值过大,可能会导致λp的估计速度过慢。
设初始为高附着系数路面(干沥青),并在低附着系数路面进行制动。取表2中的离线拟合数据,峰值点纵横坐标的估计结果如图7所示。由图7可知,μp和λp的估计结果均能在第一个ABS增减压循环内进入小误差范围,区别仅在于不同λf导致不同的估计速度和振荡幅度。
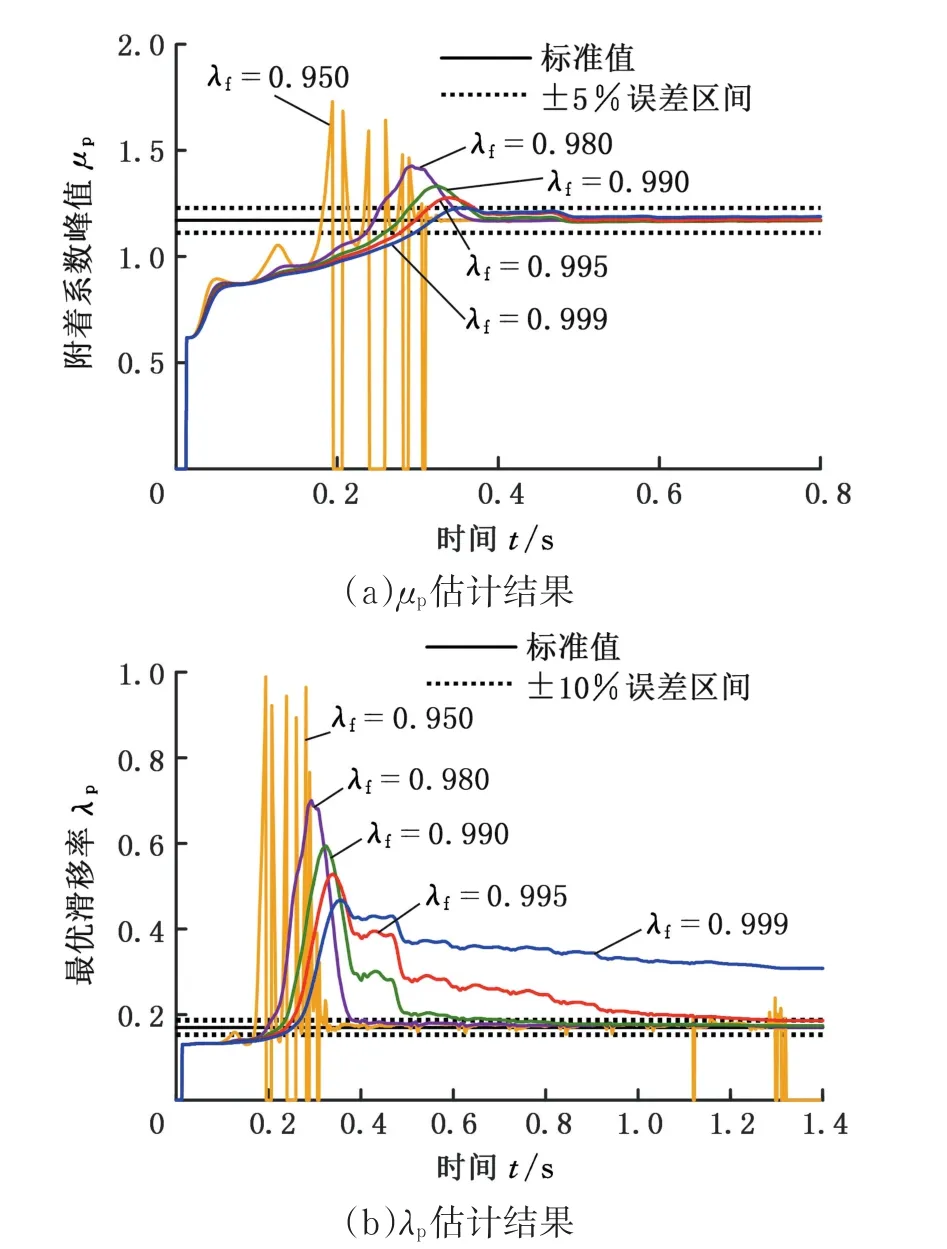
图6 低附着系数初值在高附着系数路面制动的估计结果Fig.6 Estimated results of braking on large adhesion road with small initial value
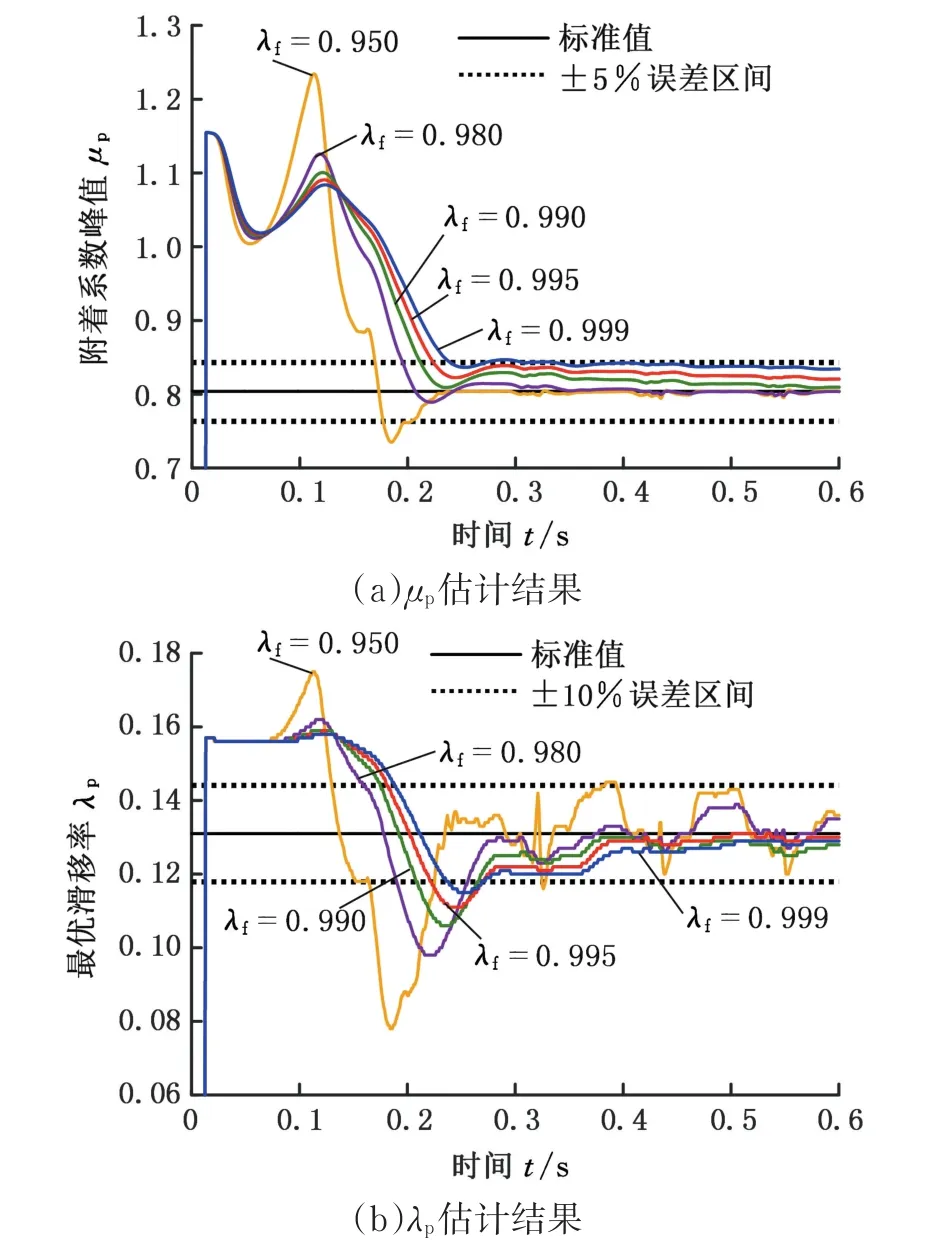
图7 高附着系数初值在低附着系数路面制动的估计结果Fig.7 Estimated results of braking on small adhesion road with large initial value
由分析可得出参数选择的结论:①在1 kHz的采样频率下,λf∈[0.980,0.995]的范围能兼顾估计的收敛速度和准确度;②初值向量θˆ(0)的取值在一定程度上影响着估计器的鲁棒性。一般地,从高附着系数初值进入低附着系数路面,估计的结果会更加迅速和准确,将高附着系数初值作为程序初始化的初值较为合适,也符合车辆大部分时间行驶于铺装路面的客观条件。
3.2 对接路面试验
本节通过一组对接路面下的ABS制动过程仿真,比较Kiencke线性化方法和指数和线性化方法的估计结果。
如图8所示,在CarSim中构建了一个同时包含积雪、干、湿路面的对接路面。需要指出的是,受制于CarSim软件路面定义功能的限制,无法在一次仿真中定义一个包含几组任意形状的路面附着条件曲线的对接路面,只能定义一种形状的附着条件曲线,再以改变滑动摩擦因数μs(λ=1)的值的方式,定义不同路面。
此路面以CarSim内置轮胎库的225/60 R18的缺省纵向附着条件为基础曲线,分别设置三种路面滑动摩擦因数μs为0.76、0.2和0.52,并通过计算得到各自的峰值点纵横坐标。
CarSim缺省路面附着条件的曲线形状与Burckhardt模型的曲线稍有不同,从量化的角度解释,原因在于缺省曲线从滑移率0至1方向,曲线斜率一直在变化,而Burckhardt模型则只是在较大的μ值附近才有明显变化,曲线的两端则近似为直线。这一差别也能考验估计方法对不同形状附着曲线的适应能力。
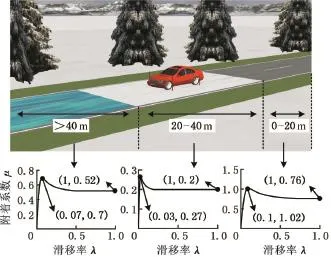
图8 CarSim对接路面定义Fig.8 The customized road in CarSim
仿真的初始条件为,初始车速80 km/h,制动踏板迅速踩下,制动压力从0 s开始上升,至0.3 s升至最大限压值。如图9所示,车辆在5 s内停止。这一过程中,估计的附着系数和弛豫滑移率的散点时间序列如图10所示。
3.2.1 Kiencke线性化模型的估计结果
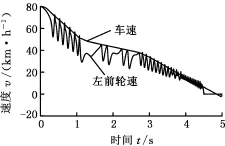
图9 ABS制动过程中的车速与车轮线速度Fig.9 Vehicle speed and wheel speed during ABS condition
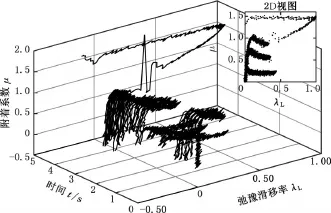
图 10 估计μˆ与λL的时间历程Fig.10 Estimated results ofˆand λL
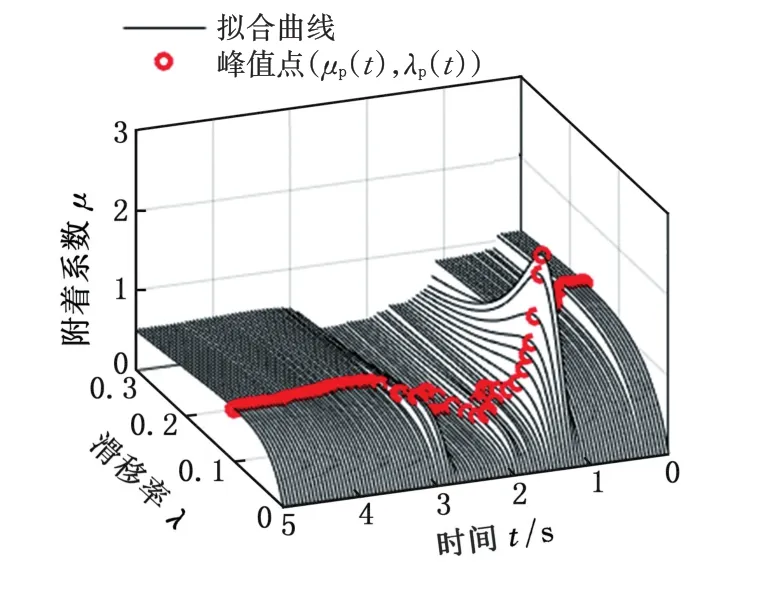
图11 Kiencke模型的拟合曲线及其峰值点Fig.11 Fitted curves and their peak points(Kiencke)
μp的估计结果较准确,但在1~1.5 s处出现了峰形,其原因在于L1轮进入对接路面的瞬间,点(μ,λ)处于峰值右侧的非线性区域,当制动力矩减小,该点从非线性区域逐渐退回线性区域的过程中,在遗忘因子的作用下,估计器结合之前高附着路面的散点(μ,λ)数据,拟合处的曲线的峰值点将往左上方移动,即μp增大,λp减小。在未展示的其他取值λf的仿真结果中,λf越小,该峰形的峰值点越大,且峰形之后会有持续小段时间的无解状态(极大值点横坐标λp大于1)。若λf逐渐增大,则峰形逐渐消失,但收敛速度将显著降低,无法在短时间内进入小误差区间。观察图12b可知,λp的估计结果较差,始终未能进入小误差范围。

图12 Kiencke模型峰值点坐标估计结果Fig.12 Estimated results ofμpand λp
3.2.2 指数和线性化模型的估计结果
设初值θˆ(0)为指数和模型离线拟合Burckhardt干沥青曲线的拟合结果,并取λf=0.995。图13为该参数下的附着特性曲线及其峰值点估计结果,图14a、图14b为图13中峰值点的两个二维视角,分别为峰值点纵横坐标的时间历程。
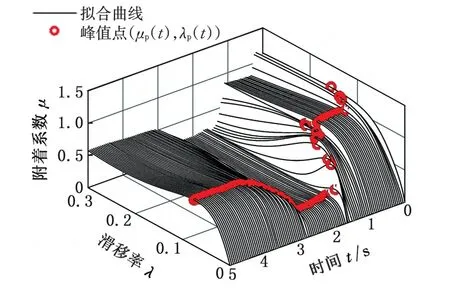
图13 指数和模型的拟合曲线及其峰值点的时间历程Fig.13 Fitted curves and their peak points(ES)
由图14a可知,三种路面上的μp估计结果均非常精确,均能够在0.5 s内进入小误差区间,具体耗时的差别取决于制动器动态特性和滑移率状态。在ABS作用下,由于制动力矩的动态特性Ṫb_L1不随路面改变,当ω̇L1< 0时,低附着路面的 ||ω̇L1稍大于高附着路面,而当ω̇L1>0时, ||ω̇L1则显著小于高附着路面。那么当车轮经历从高附着进入低附着的对接路面时,若点(μ,λ)处于非线性区域,则回到线性区域需要耗时更多,此情况会降低估计速度。即使这样,估计方法仍然获得了较好的估计结果,在1.1 s处进入低附着路面后的第一个ABS循环即进入了小误差区间。同时,由图14b可知,估计方法对λp的估计结果进入小误差区间的耗时与图14a近似,没有出现大幅跳变的发散问题。

图14 指数和模型峰值点坐标估计结果Fig.14 Estimated results ofμpand λp
4 结语
本文以前驱电动汽车的纵向制动工况为建模对象,研究了ABS触发工况下的附着条件估计方法。方法基于Effect-based的估计思想,并通过指数和模型将Burckhardt非线性模型进行线性化,离线拟合数据证明该方法估计精度较高,可应用于任意车辆;设计和搭建了联合仿真平台和搭建硬件在环试验平台,硬件在环试验验证了实时在线估计的可行性,仿真平台的结果表明,相较于Kiencke模型和其他指数和模型,本文设计的指数和模型的结构及参数具备更优的估计速度和精度,在大部分情况下,峰值点的纵横坐标能于第一个ABS循环内进入±5%和±10%小误差区间。
