风电场虚拟惯性对互联系统功角暂态稳定影响分析
2018-08-07龚文忠
龚文忠
(中国铁建重工集团有限公司,长沙410100)
0 引言
随风电场在电力系统中的渗透率的不断增加,尤其双馈感应式风机(Doubly-fed induction generator,DFIG)的广泛应用,风功率固有的间歇性和波动性使得分析风机接入对电力系统暂态稳定性的影响更加复杂化[1-2]。特别是含大容量风电场的电力系统发生区域间振荡,可能造成电力系统暂态功角失稳以及影响大容量风电场的风电机组安全运行[3]。
目前,许多文献对大规模风电场接入后电力系统暂态稳定性进行了分析[4]。文献[5]提到风电场接入系统后,可将之近似看做双机系统的机械功率增量,对原系统电磁功率并无影响,简化风电并网后系统暂态稳定分析难度。文献[6]通过定义双馈风电机组的功角特性推导出双馈机组的等效外特性,基于扩展等面积定则分析了双馈风电机组接入单端系统的功角稳定性。文献[7]中将双馈风电机组的等效外特性分别用可变负电阻或负电抗表示,阐述了双馈风电机组故障穿越过程中有功、无功控制对系统等面积定则加速面积与减速面积的影响过程。
由于区域电网的互联,整个系统的惯性时间常数的改变会影响系统的暂态稳定性,目前有部分文献已对此进行了分析[8-9]。文献[10]分别对单机无穷大系统和等值两机系统进行分析推导,得出系统惯量越大,系统相对角变化速度越慢的结论,认为送端系统惯量增加有利于系统暂态稳定,而受端系统惯量增加则导致系统暂态稳定性降低。文献[11]在此基础上,运用暂态能量函数法,在系统遭受扰动后,通过分析暂态过程中系统所积蓄的暂态能量,以判断送、受端系统惯量对系统暂态稳定性的影响。当系统受到扰动后,若系统呈两机摇摆模式,则两区域功角差曲线会出现正向摆动和反向摆动两种情况[12],上述文献中并未考虑到在不同的功角摆向时,系统惯性时间常数对系统暂态稳定水平的影响会有所不同,甚至其影响效果完全相反,遂其得出的系统惯量与系统暂态稳定水平的关系并不全面。
变速风电机组通过独立的有功调节可虚拟出可控的惯性响应[13],能够有效解决风机并网后系统惯性削弱问题。通过对风机接入后的等值两机系统进行数学推导,在风机并网后系统暂态稳定分析的理论基础上,针对不同功角摆动情况下,分析两端风电机组的虚拟惯性时间常数对互联系统功角暂态稳定水平的影响。
1 等值两区域系统
电力系统在受到大扰动会后,会在两个机群间首先失去功角稳定[14]。假设系统遭受一个大扰动后,其失稳模式为双机模式,整个系统可视为等值两机系统,其系统等值电路如图1所示。两机系统转子运动方程为:
式中 δ为发电机的转子角;Pm、Pe分别为原动机机械功率和电磁功率;T为发电机惯性时间常数;ω0为额定角速度。下标1、2分别表示与发电机G1、G2有关的变量。
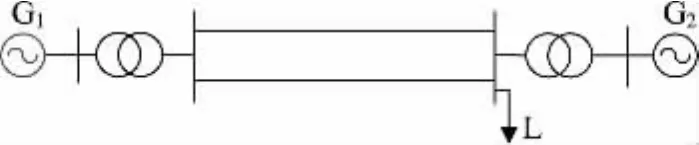
图1 两机系统模型Fig.1 Two-machine system model
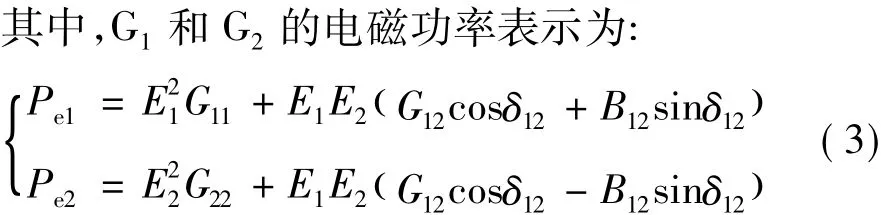
式中 δ12=δ1- δ2,为两端发电机的功角差;E1、E2表示为两端发电机内电势;G11、G22表示为两端发电机内电势节点的自电导;G12、B12表示为两机间转移电导、电纳。
具备虚拟惯性控制的风电机组,其转子运动方程可表示为:
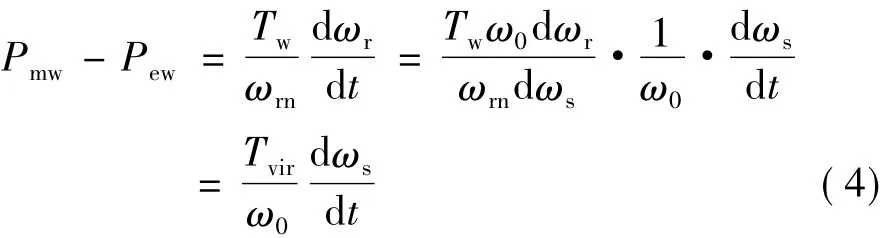
式中 Tvir=Twω0dωr/ωmdωs为风电机组虚拟惯性时间常数;Pmw、Pew分别为风电机组的机械功率和电磁功率;ωrn为风机系统额定转速;Tw为风机系统固有惯量;ωs为系统角频率。
风电机组并网后,风电机组的机械功率和电磁功率归入所在区域发电机。风电机组接入两机系统后,其等值两区域系统结构如图2所示。图2中,风电机组W1接入G1机组,风电机组W2接入G2机组,该互联两区域系统的转子运动方程可表示为:
式中 δS、δR为送、受端等值功角;PmS、PmR、PeS、PeR分别为两端系统机械功率和电磁功率,PmS=Pm1+Pmw1,PmR=Pm2+Pmw2,PeS=Pe1+Pew1,PeR=Pe2+Pew2。

图2 等值两区域系统简化模型Fig.2 A simplified model of the equivalent two-region system
2 互联两区域系统暂态稳定判定
为判定两区域互联系统暂态稳定性,式(5)、式(6)相减,可将双机系统最终化为单机无穷大系统,其运动方程为:

式中 T=T1T2/(T1+T2);δ= δS- δR,为互联两区域系统的功角差;Pm、Pe分别定义为系统等值机械功率、等值电磁功率,其表达式如下:


当系统遭受扰动后,两区域系统的功角差出现摆动,其摆动根据功角幅值的正负有两种情况:功角正摆和功角反摆。视发电机G1侧所在区域为参考,当δ=δS-δR>0时,即送端机组功角超前于受端机组功角,定义δ>0为功角正摆;反之,当δ=δS-δR<0时,即送端机组功角滞后于受端机组功角,定义δ<0为功角反摆。
若送端风电机组附加虚拟惯性控制,风电机组虚拟惯性时间常数归算入所在区域发电机,该单机无穷大系统运动方程为:

式中δ'表示送端附加虚拟惯性后两机系统功角差;TS=T1+Tvir1为送电端附加虚拟惯性控制后的等值惯性时间常数。
若附加虚拟惯性控制的风电机组接入受端发电机,设该单机无穷大系统运动方程为:

式中δ″表示受端附加虚拟惯性后两机系统功角差;TR=T2+Tvir2为受电端等值惯性时间常数。
3 互联两区域系统暂态稳定机理推导
根据上述分析,下面针对功角正、反摆情况下,分别在送、受端附加虚拟惯性的四种情况,对互联两区域系统的暂态稳定机理进行推导分析。
(1)风电接入后,若系统功角正摆,判断送端风机附加虚拟惯性对系统功角暂态稳定的影响。
式(7)、式(11)相减可得判定方程:

式中Δδ'=δ'-δ,为系统功角变化量。若Δδ'>0,说明送端机组附加虚拟惯性后,系统功角首摆变大,暂态稳定性减小;若Δδ'<0,说明系统功角首摆偏差变小,暂态稳定性提高。可以通过Δδ'的正负来进一步判断虚拟惯性对系统暂态功角稳定性的影响。
系统发生故障后有两个阶段:一是系统发生故障到故障切除,二是故障切除后。在故障切除前,假设电磁功率近似为零。由于风电场的惯性控制仅在故障后启动,故P'mS=PmS,P'mR=PmR,故障时微分方程(13)简化为:

式中1/TS-1/T1<0。故送端风电场附加虚拟惯性前后加速功率变化量小于零,即送端附加虚拟惯性后,系统加速面积减小。
初始稳态下,δ=δ0,Pm=Pe0。对于输电系统,电阻远小于电抗,即G《B,假设G=0,当故障清除后,方程(13)简化为:


由于功角正摆,在故障切除时刻有:0<δ0<δ'<δ,由式(15)可知d2Δδ'/dt2小于零,故送端风电场附加虚拟惯性前后系统减速功率变化量大于零,即送端附加虚拟惯性后,系统减速面积增大。
综上,在系统功角正向摆动的情形下,送端区域风电场附加虚拟惯性控制后,系统加速面积减小,减速面积增大,由扩展等面积定则可知,系统暂态功角稳定性提高。
(2)风电接入后,若系统功角反摆,判断送端风机加虚拟惯性对系统功角暂态稳定的影响。
此时系统暂态稳定判定方程为:

故障切除前、后系统暂态稳定判定方程式(16)分别为式(14)、式(15)相反数,可得到系统加速面积增大,减速面积减小的结论,即功角反摆时,送端网络附加虚拟惯性将降低系统暂态稳定水平。
(3)风电接入后,若系统功角正摆,判断受端风机加虚拟惯性对系统功角暂态稳定的影响。
式(7)、式(12)相减可得判定方程:

式中 Δδ″=δ″-δ。故障时,微分方程(17)简化为:
式中1/T2-1/TR>0。故受端风电场附加虚拟惯性前后加速功率变化量小于零,即受端附加虚拟惯性后,即系统加速面积增大。
故障清除后,方程(17)简化为:


同理可知受端风电场附加虚拟惯性前后,系统减速功率变化量小于零,系统减速面积减小。在系统功角正向摇摆的情形下,受端区域风电场附加虚拟惯性控制后,系统加速面积增大,减速面积减小,系统暂态功角稳定性降低。
(4)风电接入后,若系统功角反摆,判断受端风机加虚拟惯性对系统功角暂态稳定的影响。
此时判定方程为:

故障切除前、后系统暂态稳定判定方程式(20)分别为式(18)、式(19)相反数,可得到系统加速面积减小,减速面积增大的结论,即功角反摆时,受端网络附加虚拟惯性更有利于系统暂态稳定。
4 仿真验证
为验证理论分析,采用DIgSILENT/PowerFactory软件,建立如图3所示系统模型。其中负荷L1、L2分别为600 MW 和900 MW,G1、G2的额定容量均为900 MW,发电机G1系统惯性时间常数为5.5 s,发电机G2系统惯性时间常数为4.175 s,风电机组虚拟惯性时间常数设为30 s。风机参数设置如表1所示,同步发电机参数设置如表2所示。故障设置为母线8发生三相短路故障,故障时长为0.1 s。

表1 2 MW DFIG参数(标幺化)Tab.1 Parameters of the 2 MW DFIG

表2 同步发电机参数(标幺化)Tab.2 Parameters of the synchronous generators

图3 系统仿真结构图Fig.3 System simulation structure diagram
故障发生后,若两端发电机出力不同,则两端系统功角摆向也会发生变化。仿真通过改变发电机G2的有功出力,以改变系统潮流,使得系统功角出现正、反摆两种情形。在功角正、反摆情况下,分别启动送、受端风电机组虚拟惯性控制,对所推导的互联两区域系统的暂态稳定机理进行验证。
图4(a)为在功角正向摆动时,送端风电机组附加虚拟惯性控制。通过比较曲线可以看出,相对于无虚拟惯性控制下,送端附加虚拟惯性使得两区域系统功角第一摆幅值减小至9.7°,振荡时间缩短,系统暂态稳定水平得到有效提高。
图4(b)为在功角正向摆动时,受端风电机组附加虚拟惯性控制。相对于无虚拟惯性控制下,受端附加虚拟惯性使得两区域系统功角第一摆幅值增加,降低了系统暂态稳定水平。
图4(c)为在功角反向摆动时,送端风电机组附加虚拟惯性控制。相对于无虚拟惯性控制下,送端惯量增加使得两区域系统功角第一摆幅值增大,系统暂态稳定水平下降。

图4 两区域互联系统相对功角曲线Fig.4 Relative power angle curve of two-area interconnected system
图4(d)为在功角反向摆动时,受端风电机组附加虚拟惯性控制。通过比较曲线可以看出,相对于无虚拟惯性控制下,受端附加虚拟惯性使得两区域系统功角第一摆幅值减小至7.2°,振荡时间缩短,系统暂态稳定水平得到有效提高。
结合图4(a)~图4(d),当功角正向摆动时,应启动送端风电机组虚拟惯性控制以改善系统暂态稳定;反之,当功角反向摆动时,受端风电机组虚拟惯量增加更有利于系统暂态稳定。
5 结束语
对风机接入后的等值互联两区域系统功角暂态稳定水平进行研究,分析两端风机虚拟惯量对系统功角暂态稳定的影响,通过仿真分析得出如下结论。
(1)等值两区域互联系统在不同的运行方式下,其功角会出现正摆和反摆两种情况,在功角不同摆动方向下,两端风电机组分别附加虚拟惯量对系统暂态稳定影响是不同的;
(2)功角正摆时,送端风电机组附加虚拟惯量将减小系统加速面积,增大减速面积,进而增大系统极限切除时间,提高系统暂态稳定水平;反之,受端风电机组附加虚拟惯量使得效果恰好相反,系统暂态稳定水平降低;
(3)功角反摆时,送端风电机组附加虚拟惯量将增大系统加速面积,减小减速面积,使得系统极限切除时间缩短,系统暂态稳定水平降低;受端风电机组附加虚拟惯量则有利于系统暂态稳定。
