分布式后驱电动客车驱动防滑系统设计及验证*
2018-08-03梁志伟朱绍鹏刘震涛方子东宁晓斌
梁志伟,朱绍鹏*,刘震涛,方子东,厉 蒋,宁晓斌
(1.浙江大学 动力机械及车辆工程研究所,浙江 杭州 310027;2.杭州伯坦科技工程有限公司,浙江 杭州 310012;3.浙江工业大学 车辆工程研究所,浙江 杭州 310014)
0 引 言
采用轮毂/轮边电机的分布式驱动电动汽车,因其各轮驱动力可独立实时控制,具有明显的整车动力学控制优势,近年来成为电动汽车领域的研究重点。相比于传统集中式单电机驱动车辆,分布式驱动电动汽车具有多电机控制自由度高、可控裕度大等优点。因此,在多电机分布式驱动基础上设计的驱动防滑系统,在消除单个驱动车轮的打滑现象后,还应充分发挥分布式驱动优势[1-3],通过协调分配多个驱动轮转矩,进一步提高整车行驶稳定性。
国内外不少学者针对分布式驱动电动小型乘用车开展了驱动防滑系统设计,并通过实车试验验证了设计的控制策略的有效性:文献[4]设计了一种转矩矢量控制器;文献[5]设计了一个多滑模面控制器来控制车辆的滑转率;文献[6]提出了一种将最佳滑转率比例积分控制和动态等转矩驱动控制相结合的控制方法。
上述研究都是针对分布式驱动小型乘用车开展的,对分布式驱动电动客车研究的关注度相对较低,相关的驱动防滑研究还很少。基于滑模控制,文献[7-8]分别针对四轮轮边电机驱动电动客车、电动铰接客车,设计了驱动防滑系统,并通过仿真分析验证了策略的有效性。由于分布式驱动电动客车的驱动防滑实车试验相比于小型乘用车对成本、场地、驾驶员素质等都有更高的要求,故相关研究基本处于仿真验证阶段,而仿真验证必须采用准确的分布式驱动车辆模型才具有实际验证意义。
针对客车分布式驱动防滑功能需求,本文设计包括滑转率估算、单轮驱动防滑、双轮转矩协调控制的驱动防滑系统。
1 分布式后驱电动客车建模及实车试验
1.1 整车模型及基本驱动力分配模型
分布式后驱电动客车模型主要包含客车整车模型及基本驱动力分配模型,由重型车辆动力学仿真软件TruckSim与控制系统仿真软件Matlab/Simulink联合仿真建模完成。分布式后驱电动客车实车参数如表1所示。

表1 分布式后驱电动客车实车参数
根据表1中,在TruckSim中建立客车整车模型如图1所示。

图1 TruckSim客车模型
本研究在Simulink中建立基本驱动力分配模型、电机模型、驾驶员模型、“人-车-路”状态观测模型。
基本驱动力分配模型如图2所示。
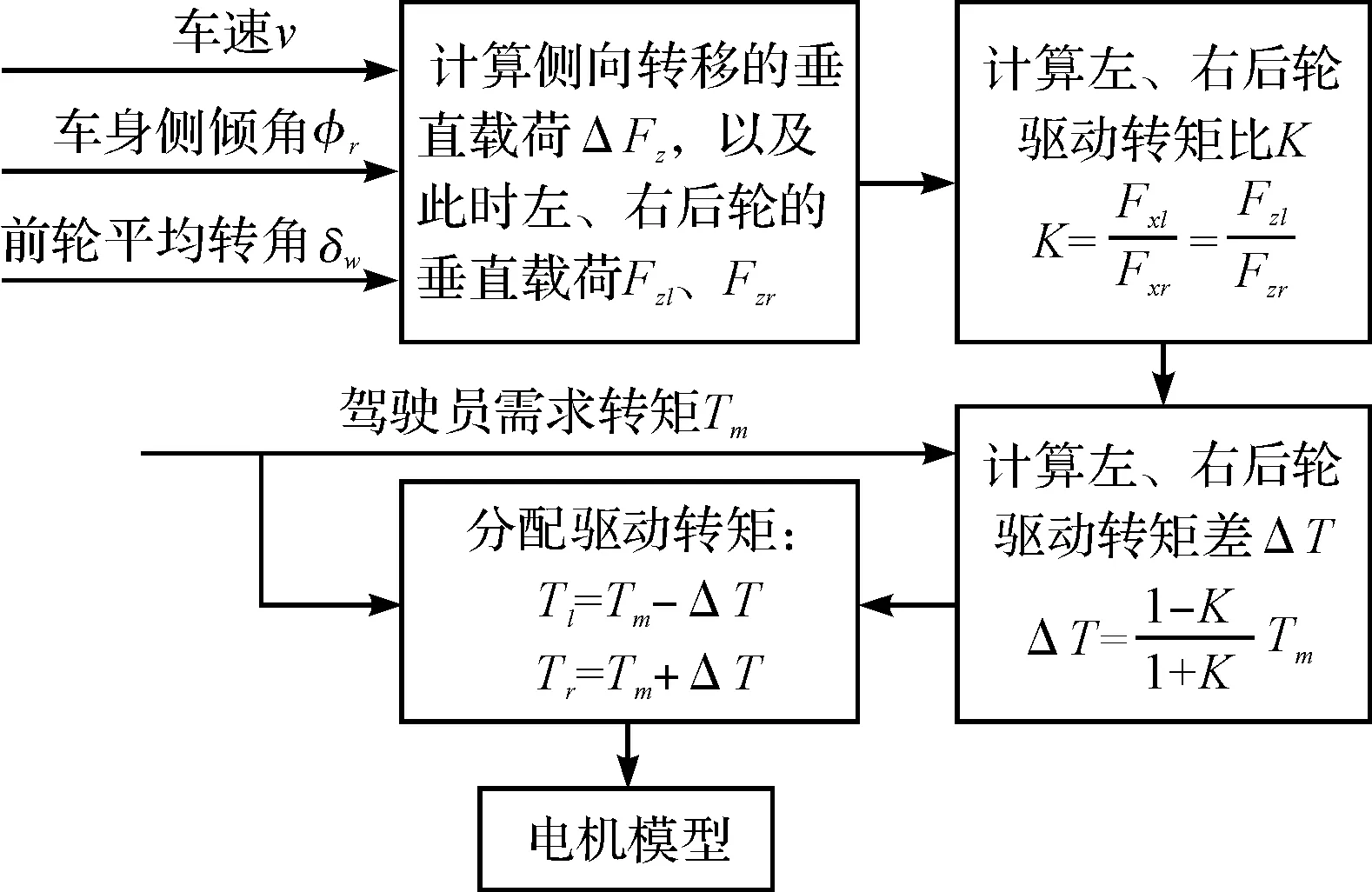
图2 基本驱动力分配模型
基本驱动力分配模型的作用是按照驾驶需求合理分配左右后轮的驱动力,例如当客车转弯时,该模型控制分配到左右后轮两个驱动电机的转矩,从而实现差速差力的功能,保证车辆正常转弯,具体控制策略可参考文献[9-10]。
本研究使用TruckSim、Matlab/Simulink搭建了分布式驱动电动客车驱动力控制联合仿真系统,总体框架如图3所示。
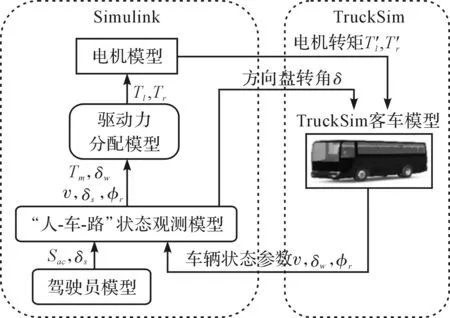
图3 分布式后驱电动客车驱动力控制联合仿真系统
1.2 实车试验与仿真结果对比验证
本研究将1.1节设计的Simulink基本驱动力分配模型转换成C程序实装到后轮装有两个轮毂电机的电动客车(整车参数与表1相符)的整车控制器中,来分配其两个后轮的驱动力,并进行了多个工况的实车试验。
本文选取了能体现基本驱动力分配策略效果的左转以及右转2个典型试验样本,用以与建立的分布式后驱电动客车模型的仿真结果进行对比分析。
左转工况初始车速47.7 km/h,持续时间10 s;右转工况初始车速为0 km/h,持续时间10 s。仿真的输入为方向盘转角以及由加速踏板开度决定的总需求转矩这两个实车试验数据,仿真时车辆初速度设置与实车试验相应工况对应。对比分析左右后轮两轮毂电机的输出转矩,如图(4,5)所示。

图4 左转工况仿真与实车试验对比分析
图5 右转工况仿真与实车试验对比分析
从图4、图5可知:在左转、右转两种工况下,左右后轮两个轮毂电机转矩的试验输出值和仿真输出值基本相近,吻合度较高,验证了搭建的分布式后驱电动客车模型的准确性。第3章联合仿真验证驱动防滑控制时采用了该模型。
2 驱动防滑控制模型设计
本文针对分布式后驱电动客车的实际需求,结合分布式驱动的特点,设计了包括滑转率计算模块、单轮驱动防滑、双轮转矩协调控制的驱动防滑模型。双轮转矩协调控制在单轮独立驱动防滑后进一步调整电机输出转矩,以调整车身姿态,保证车辆的稳定性,并将滑转率控制在经验值0.15左右,驱动防滑模型的框架如图6所示。
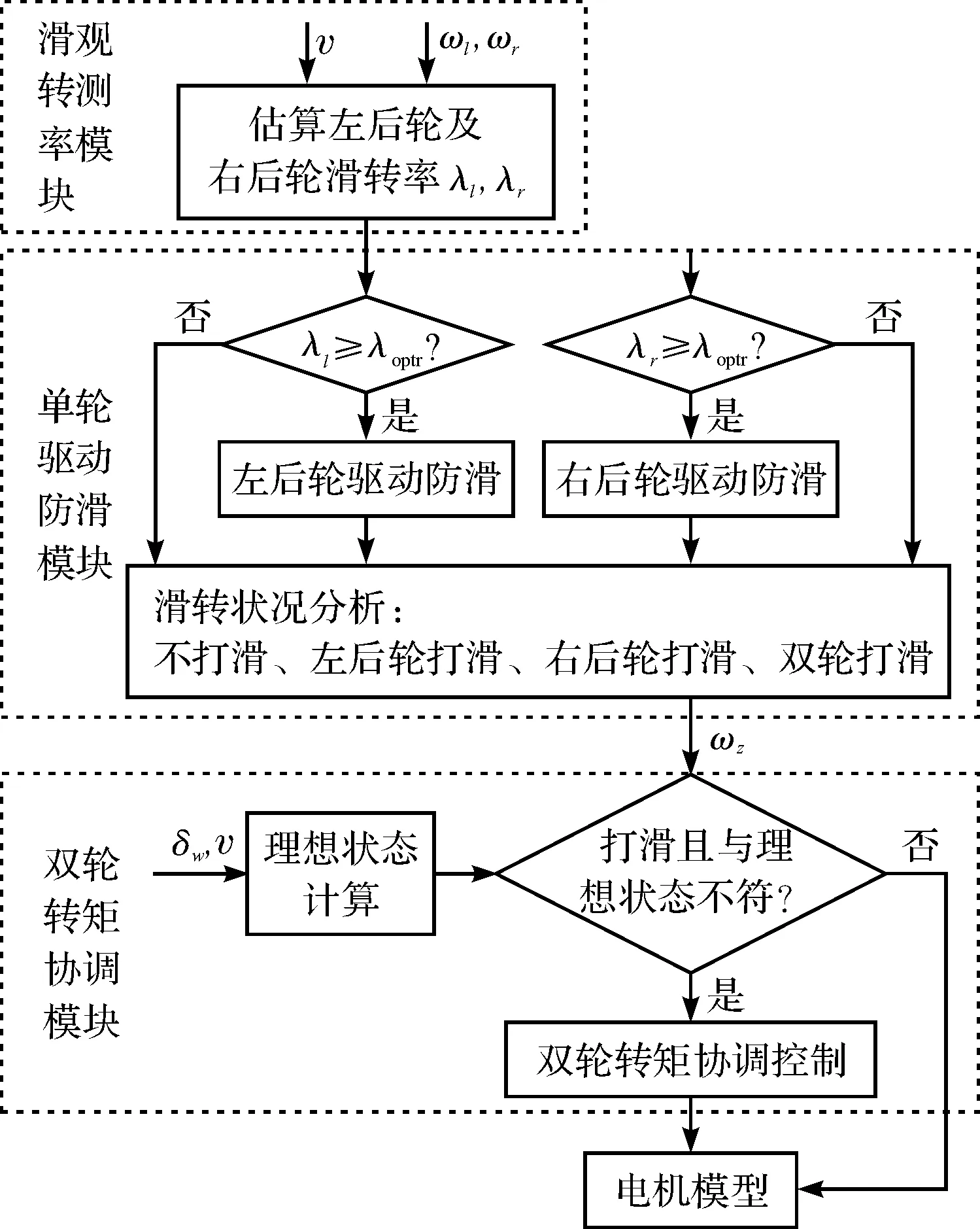
图6 驱动防滑模型框架
2.1 单轮驱动防滑
以左后轮的驱动防滑控制为例,左后轮滑转率为:
(1)
式中:λl—左后轮滑转率;vl—左后轮轮心速度;vwl—左后轮切向速度。
当判断出λl数值大于路面的最优滑转率λoptl时,则以λoptl为控制目标,通过PI控制器调节电机输出转矩,从而将滑转率控制在最优滑转率附近。PI控制器输入为滑转率偏差Δλl(Δλl=λoptl-λl),输出为消除车轮打滑所需的电机转矩调整量为:
(2)
式中:Kp1—比例系数;Ki1—积分系数。
2.2 双轮转矩协调控制
横摆角速度与质心侧偏角是两个衡量车辆状态的重要参考量。车辆当前横摆角速度可由传感器直接测得,而目前尚无实时可靠的传感器可测量质心侧偏角。因此,双轮转矩协调控制模块仅将横摆角速度作为控制量,设计了横摆角速度PI控制器,使车辆的横摆角速度γ尽可能控制在当前工况下的理想横摆角速度γ*附近。
根据车辆二自由度模型计算出理想横摆角速度γ*:
(3)
式中:v—车辆当前车速;δ—前轮平均转向角;L—轴距;K—稳定性因数[11],其表达式如下:
K=m(a/k2-b/k1)/L2.
(4)
式中:m—车辆质量;a,b—前后轴到质心的距离;k1,k2—前后轮的侧偏刚度,经计算K为0.005。
控制器同样采用PI控制方法,输入为横摆角速度差Δγ(Δγ=γ*-γ),输出为需要调节的电机转矩如下:
(5)
式中:Kp2—比例系数;Ki2—积分系数。
考虑到客车体积重量大,控制难,故仅在车速较小时采取以上转矩协调方案。笔者设计临界车速30 km/h,当车速大于该值时,在实施单轮驱动防滑后,以小转矩输出电机为基准,减小大转矩电机的输出转矩,使两电机输出同等转矩,最大限度保证车辆稳定性。
3 联合仿真验证
本研究在已经被实车试验验证过的分布式后驱电
动客车驱动力控制联合仿真系统(图3)中加入设计的驱动防滑模型,形成包含驱动防滑功能的分布式驱动控制联合仿真系统如图7所示。
分布式后驱电动客车初始车速设为5 km/h,左右后轮电机的初始转矩为5 000 Nm,方向盘转角输入保持为0,通过对接路面及对开路面两种仿真工况,验证设计的用于分布式后驱电动客车的驱动防滑控制策略的有效性。
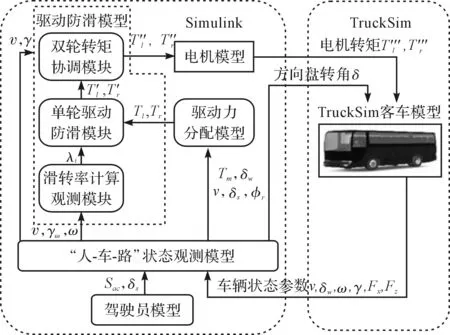
图7 驱动防滑控制联合仿真系统
3.1 对接路面工况仿真
对接路面前20 m的附着系数为较高的0.5,20 m~60 m之间的附着系数为较低的0.1,60 m以后的路面附着系数重新变为0.5,仿真结果如图8所示。
由图8(a,b)左右侧电机的输出转矩可知,车辆在行驶5 s之后进入附着系数0.1的低附着路面,此时带驱动防滑控制的左右后轮电机输出转矩迅速降低到1 800 Nm左右,而不带驱动防滑控制的电机仍然保持为最初需求转矩5 000 Nm,导致无驱动防滑控制的左右两个驱动轮滑转率迅速上升到0.8以上,而带驱动防滑控制的左右两个驱动轮滑转率仍然保持在较低的数值(小于0.1),也与该路面条件下的最佳滑转率接近,符合实际,如图8(c,d)所示。从图8(e~g)中可以看到,无防滑控制的车辆在进入低附着路面后横摆角速度以及质心侧偏角迅速增加,10 s之后绝对值分别达到了11°/s和5.5°,车辆出现失稳现象,而带防滑控制的车辆运行稳定;在同样带有单轮驱动防滑控制的情况下,有协调控制的车辆,纵向位移相比于无协调控制的车辆更小,稳定性增强。
3.2 对开路面工况仿真
车辆在附着系数为0.5的高附着路面行驶10 m后,进入路面左侧附着系数为0.5,路面右侧附着系数为0.1的对开路面,仿真结果如图9所示。
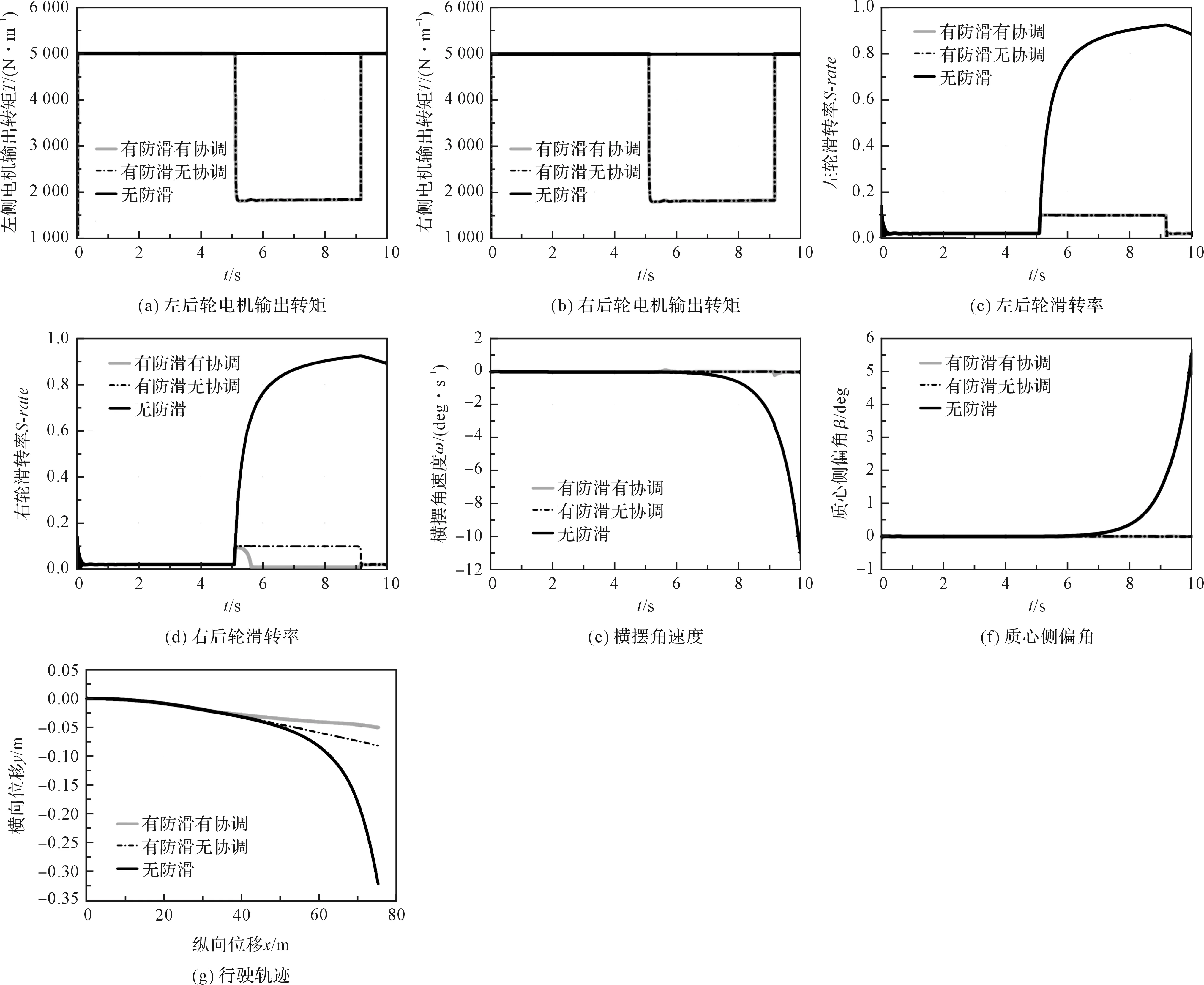
图8 对接路面仿真结果
由图9(a,b)左右后轮电机的输出转矩以及图9(c,d)左右后轮滑转率可知,车辆在行驶大约4 s之后进入对开路面,此时右侧车轮进入低附着路面,带驱动防滑控制的右后轮电机输出转矩迅速降低到1 800 Nm左右,而不带驱动防滑控制的右后轮电机仍然保持为最初需求转矩5 000 Nm;带驱动防滑控制的左右两后轮的滑转率仍然保持在较低值(0.1以下),与该路面条件下的最佳滑转率接近,符合实际而无驱动防滑控制的右后轮滑转率迅速上升到0.8以上;带有协调控制的左后轮电机输出转矩,在右后轮电机输出转矩迅速减小后也相应地减小;当行驶约8.5 s之后,无协调控制的车辆由于轻微跑偏,左右两轮都进入低附着路面,左后轮电机的输出转矩也被控制到右后轮电机的相同水平。从图9(e~g)中可以看到,无防滑控制的车辆在进入对开路面后横摆角速度以及质心侧偏角迅速增加,10 s之后绝对值分别达到了11°/s和6.3°,车辆出现失稳现象;有单轮驱动防滑但无协调控制的车辆的横摆角速度以及质心侧偏角绝对值在10 s后也分别达到了3.5°/s以及2°,与不带驱动防滑的车辆相同出现较大侧向位移,车辆开始失稳;而单轮驱动防滑及协调控制的车辆侧向位移较小,行驶稳定。
以上仿真结果表明,在低附着系数的对接路面和对开路面上,所设计的单轮驱动防滑模块能迅速发挥作用,减小打滑轮侧电机的输出转矩,使车轮滑转率保持在较低的水平;在对接路面上,由于左、右后轮同时进入附着系数相同的低附着路面,两电机的输出转矩保持同步减小,车辆未产生明显的非期望横摆力矩,转矩协调控制模块仅起到微弱调整作用;而在对开路面上,实施单轮驱动防滑后产生较大的非期望横摆力矩,协调控制模块作用明显,使车辆能够稳定行驶。

图9 对开路面仿真结果
4 结束语
针对采用两个轮毂电机的分布式后驱电动客车,本文基于实车参数在Trucksim搭建了客车模型,并对搭载了基本驱动力分配算法的客车进行了场地试验,选取了左转以及右转两个能体现基本驱动力分配算法效果的工况的试验数据,与仿真数据进行对比,验证了客车模型的准确性。
本文设计了包括滑转率估算、基于PI控制的单轮驱动防滑、双轮转矩协调的驱动防滑系统,将验证过的客车模型用于Trucksim与Matlab/Simulink联合仿真平台,进行低附着系数对开路面及对接路面多工况联合仿真测试,对各电机输出扭矩、各车轮滑转率、横摆角速度、质心侧偏角、车辆侧向位移等多个仿真参数进行分析,结果表明,所设计的驱动防滑控制模型能有效地抑制了车轮打滑现象。
