Adaptive Sliding-Mode Control of an Automotive Electronic Throttle in the Presence of Input Saturation Constraint
2018-07-31RuiBai
Rui Bai
Abstract—In modern vehicles,electronic throttle(ET)has been widely utilized to control the air flow into gasoline engine.To solve the control difficulties with an ET,such as strong nonlinearity,unknown model parameters and input saturation constraints,an adaptive sliding-mode tracking control strategy for an ET is presented.Compared with the existing control strategies for an ET,input saturation constraints and parameter uncertainties are adequately considered in the proposed control strategy.At first,the nonlinear dynamic model for control of an ET is described.According to the dynamical model,the nonlinear adaptive sliding-mode tracking control method is presented,where parameter adaptive laws and auxiliary design system are employed.Parameter adaptive law is given to estimate the unknown parameter with an ET.An auxiliary system is designed,and its state is utilized in the tracking control method to handle the input saturation.Stability proof and analysis of the adaptive sliding-mode control method is performed by using Lyapunov stability theory.Finally,the reliability and feasibility of the proposed control strategy are evaluated by computer simulation.Simulation research shows that the proposed sliding-mode control strategy can provide good control performance for an ET.
I.INTRODUCTION
I N vehicles powered by gasoline engines,the accelerator pedal actuated by the driver is linked to the engine throttle.Engine throttle plays an important role in vehicle’s engine.The throttle plate opening regulates air flow into the intake manifold of engine system,which will affect the engine operating efficiency[1],[2].In the past,the accelerator pedal and the throttle were connected by mechanical equipment.Nowadays,many important functions of vehicles are shifting from a purely mechanical to an electromechanical execution,commonly known as an “X-by-wire”system.This electromechanical system is utilized as an interface between the driver and the directed automotive subsystem(e.g.,engine throttle,brakes,etc.)[3]-[6].The mechanical connection between the accelerator pedal and the engine throttle is replaced by an electronic linkage,commonly known as an electronic throttle(ET)in modern vehicles.An ET is essentially a valve driven by a servo dc-motor,which regulates the air in flow into the engine system.By using an ET,the engine control unit can control the throttle valve angle according to the specific engine operation condition and mode.Therefore,the fuel economy,drivability,and emission of vehicle can be significantly improved[7],[8].ET has been widely used in automotive engine for its above mentioned advantage.
The control objective of an ET is to control the actual valve angle track a reference signal with the fast and accurate property[8].The main difficult problem of ET control is the presence of the strong nonlinearity caused by the transmission friction and return spring,unknown system parameters,external disturbance,and input saturation constraint.For the past few years,this challenging and important automotive control issue has attracted more and more attention in the research community and vehicle industry,and some control methods for ET have been presented[8]-[16],including Proportionalintegral-derivative(PID)control,state feedback control,optimal control,adaptive control,robust control,sliding control,intelligent control,and so on.[8]presented the dynamical model and unknown parameters identification of an industrial automotive ET control system.A nonlinear closed-loop control system based on the input-output liberalization approach is designed for an ET.In[9],a PID controller with a feed for word compensator was presented for the ET control system.In[10],based on the theory of linear quadratic regulator(LQR)control,a scheme of discrete-time optimal preview position control algorithm for an ET was designed.In[11],an adaptive servo control method was presented for an ET.In[12],a robust H∞control strategy with mixed-sensitivity synthesis method was designed for an ET.In[13],at first,some observers were designed to estimate the unmeasured states in an ET and a sliding-mode controller was designed to control an ET.In[14],an adaptive control strategy with the inverse model was presented for an ET.The unknown functions in an ET were approximated by using two RBF neural networks.In[15],an explicit Luenberger-sliding mode observer was designed,and a sliding-mode control with fuzzy double loop was presented for an ET.[16]proposed a robust terminal sliding-mode control method,and the uncertainty in an ET was approximated by using a neural network.
Although these existing works have obtained the acceptable control performance for the specified operation condition,there are some important issues for an ET that should be further discussed,especially,the input saturation constraint with an ET.In many industrial systems,due to the physical saturation constraint on hardware including the actuator,the magnitude of the control command signal is often limited to a specified range.Input saturation is an important issue for the control system,which often severely affects control system performance and can reduce control accuracy and system stability[17],[18].The control strategy of an uncertain nonlinear system under the input saturation constraint has been extensively researched in recent years.For example,in[18],an adaptive control method of the nonlinear dynamical system with input saturation was proposed.In the proposed adaptive control method,the Nussbaum function was introduced to compensate for the influence of the input saturation.In[19],by employing an neural network,an adaptive control method was designed for an n-link robotic manipulator with an input saturation constraint.The proposed control method can obtain satisfactory tracking control performance.In[20],to analyze the effect of input saturation,an auxiliary design system was introduced.The state of auxiliary design system was used to design the control method for handling input saturation.In[21],[22],the novel symmetric and asymmetric barrier Lyapunov functions(BLFs)are adopted to guarantee that the states do not violate their constraints.
Due to limited power supply capacity in vehicles,the driving-motor voltage in an ET has a limited range.In general,the limited range of the driving-motor voltage is 0 to 5 volts.Thus,there is an input saturation constraint in the control system of ET.Input saturation severely degrades the control performance of ET,including the position accuracy and closed-loop stability.However,in the aforementioned existing control methods for ET,the input saturation problem is rarely considered.To improve the control performance of ET,an adaptive sliding-mode tracking control method for ET is proposed in this paper.The innovations and contributions of this paper are summarized and listed as follows.
1)To solve the nonlinearity,unknown parameter,and external disturbance,we have presented an adaptive sliding-mode control for an ET.Parameter adaptive law is used to estimate the unknown parameter on ET.Compared with the existing control methods for ET,sliding-mode control with parameter adaptive laws is firstly used to control ET.
2)To solve the input saturation constraint,we have designed an auxiliary design system to analyze the effect of input saturation on an ET.For handling the input saturation constraint,the state of auxiliary design system is used in the presented adaptive sliding-mode control.Furthermore,the stability of closed-loop system is ensured using Lyapunov stability theorem.Compared with the existing control methods for an ET,input saturation is considered and solved in the proposed control method.
The rest of this paper is organized as follows.The uncertain nonlinear dynamic model of an ET is described in Section II.The adaptive sliding-mode controller with input saturation for an ET is designed in Section III.Section IV is the presentation and analysis of the simulation results.At last,some conclusions are given in Section V.
The following nomenclature is used throughout the paper:Nomenclature:
θdReference angle of the throttle valve
θ(t) Actual angle of the throttle valve
θ0Static angle of the throttle valve
ω(t) Angular speed of the throttle valve
ia(t) Armature current
RaArmature resistance
Ua(t) Input voltage of the driving motor
Ea(t) Counter electromotive force
LaInductance of the armature loop
Te(t) Electromagnetism torque
TL(t) Load torque of the driving motor
Ts(t) Return spring torque
Tf(t) Friction torque
KtTorque constant
KaElectromotive force constant
KsElastic coefficient in the return spring
KmTorque compensation coefficient in the return spring
KdSliding friction coefficient in the friction torque
KkCoulomb friction coefficient in the friction torque
JREquivalent moment of inertia
j Gear ratio
II.DESCRIPTIONS AND MODELING OF ET
An ET is a valve driven by the servo dc motor in modern vehicles.The ET can control the air flow into the vehicle’s engine by adjusting the opening angle of the valve plate.The schematic control structure of ET is described in Fig.1.The main components of Fig.1 include the controller and electronic throttle body.An electronic throttle body is assembled with a dc motor,a gear unit,a valve plate,a return spring and a position sensor.The driving motor and throttle valve plate are connected by a gear unit.The throttle valve plate determines the load on the driving motor.By changing the input voltage of driving motor,the electromagnetic torque of driving motor is changed,and the angle of the throttle valve plate is regulated at the same time.The return spring is a mechanical protection device introduced with an ET.The return spring ensures that when the driving motor fails to work,the throttle valve plate maintains a certain safety angle,named the limp-home(LH)angle.The position sensor detects the angle of the throttle valve in real time,and delivers the angle to the controller.The control objective of ET is to achieve the fast and accurate tracking control performance of the opening angle.
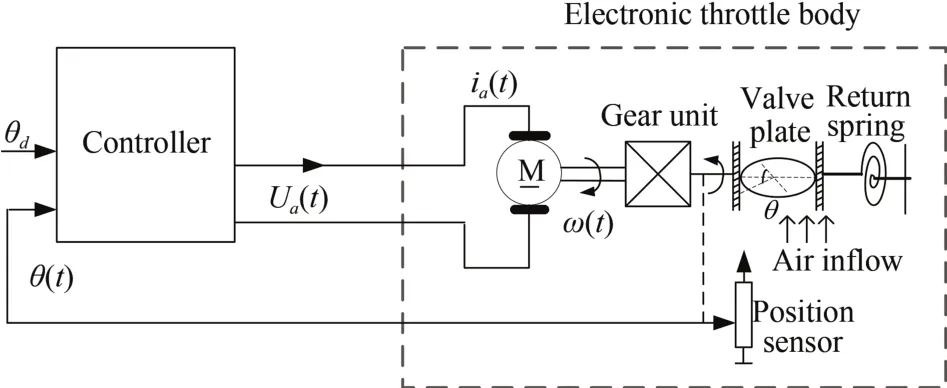
Fig.1.Schematic diagram of electronic throttle control.
The dynamical characteristic of the dc motor in ET is shown as

The electrical balance equations of the armature loop are

According to(2)and(3)and ignoring the inductance La,we have

According to the electromagnetic torque expression,we have

Substituting(4)into(5),we have

The nonlinear toque of return spring in ET is

where θ is the initial angle of the valve plate.
The nonlinear friction torque in ET consists of a viscous and a Coulomb torque.The nonlinear friction torque is[11]

Substituting(6)-(8)into(1),the dynamic equation of ET is given by

Defining state variables x1(t)= θ(t)- θ0,x2(t)= ω(t),control variable u(t)=Ua(t),and considering the external disturbance d(t),the aforementioned dynamic equation can be simplified as

where


In(10),d(t)is the unknown external disturbance.d(t)satisfies the following constraint inequality:

where D is a known constant,indicates the maximum value of d(t).
Therefore,(10)is the nonlinear state-space model of ET.The major control difficulties for ET are discussed as follows:
1)Strong nonlinear dynamics caused by the return spring and friction.
2)In the electronic throttle system,Kt,Ka,JRand Raare known parameters.Ks,Km,Kdand Kkare unknown parameters.Therefore,in(10),µ0is a known parameter,andµ1,µ2,µ3as well asµ4are unknown parameters.
3)The driving voltage of the dc motor in ET has a limited range.Therefore,there is an input saturation constraint in the control system of ET.
III.TRACKING CONTROL METHOD FOR ET
To solve the control difficulties listed in the end of Section II,an adaptive sliding-mode control method for an ET is designed in this section.Fig.2 illustrates the proposed control method of an ET.According to the dynamical model,the nonlinear adaptive sliding-mode tracking control method is designed,where the parameter adaptive laws and auxiliary design system are employed.ˆµiis the estimation of unknown parameter in an ET.ξ is the state variable of auxiliary design system.Parameter adaptive laws are designed to estimate the unknown parameters in the dynamical model of an ET.To analyze the effect of input saturation in ET,an auxiliary design system was introduced.The state variable of the auxiliary design system is introduced into the proposed tracking controller to handle the input saturation.

Fig.2.Schematic diagram of electronic throttle control.
To get a better description of the proposed control method,at first,we design a sliding-mode control for ET without considering the unknown parameters and input saturation in Section III-A.Based on the control method in Section IIIA,an adaptive sliding-mode control for ET is designed in Section III-B,where unknown parameters and input saturation are considered.
A.Sliding-Mode Control for ET
The tracking error of valve plate angle is defined as

where xd(t)= θd(t)- θ0.
s(t)is the sliding-mode surface,which is described as

where c is a positive constant.
The sliding-mode control signal consists of two parts,including the equivalent control signal and the switching control signal[23].The equivalent control signal is the control which keeps the trajectories of the dynamical system on the slidingmode surface.It can be solved from˙s(t)=0.A switching control signal makes the trajectories of the dynamical system move towards the sliding-mode surface.
The sliding-mode control signal is

where ueq(t)is the equivalent control signal.usw(t)is the switching control signal.
Neglecting the external disturbance,the derivative of s(t)is given by

Letting˙s(t)=0,u(t)in(15)is the equivalent control signal ueq(t).From(15),ueq(t)is computed as
According to designing principle of the sliding-mode control[21],the switching control signal usw(t)is designed as

where K is a positive constant.K satisfies the following condition:

Therefore,sliding-mode control is
B.Adaptive Sliding-Mode Control With Input Saturation for ET
As described in Section II,µ1,µ2,µ3and µ4are unknown parameters.Therefore,the control law(20)cannot be applied in engineering practice.In this section,to estimate the unknown parameters with an ET,parameter adaptive laws are designed.An auxiliary design system is designed which is utilized to analyze the effect of the input saturation.

For the input saturation constraint,we define

where Uminand Umaxare known constants.
Therefore,the control input signal u is

In(23),v is the control command,which will be designed in the following steps.
The following auxiliary design system is used to analyze and reduce the saturation effect[19],[20]:

where ξ is the state variable of the auxiliary design system.ε is a small positive design parameter.b> µ0> 0.
The Lyapunov function candidate V(t)is given as
where γ1,γ2,γ3,and γ4are positive constants,respectively.
The time derivative of V(t)is

Substituting(12),(13),(21),(24)into(27),we have
Noting the following fact
we have
In this section,parameter adaptive laws are designed as
Invoking(30)-(34),the derivative of V(t)is
In this section,the control command v is designed as

where c2>0 is a design parameter.
In this section,design parameters c1and c2are specified to satisfy the following inequality constraint:

Remark 1:For stability,K is usually chosen to be conservatively large.This is not very desirable due to the chattering introduced.To improve the response time,c should be chosen to be conservatively large.
Theorem 1:For the nonlinear dynamical electronic throttle system described by(10),under the control law(36)with the parameter adaptation laws(31)-(34),with the specified inequality(37)for design parameters,the closed-loop control system of ET is stable.
The proof process of Theorem 1 is provided in the Appendix.
IV.SIMULATION RESULTS
Some simulations are executed to evaluate the reliability and feasibility of the proposed adaptive sliding-mode controller with input saturation for ET.According to the actual power supply capacity in engine control unit,the limited range of driving-motor voltage is[0,5].In the simulation,some main parameters of ET are j=18,JR=5×10-4,Ra=4.5,Ka=0.0193,Kt=0.019,Ks=0.046,Km=0.15,Kd=4×10-4,Kk=4.8×10-3,d(t)=0.5 sin(t),Umax=5,Umin=0.
Simulation results are given in Figs.4-6.In the simulation,the reference valve angle in ET is 60 degrees.Both the control command v and the control input variable u are shown in Fig.3.In the initial stage of Fig.3,the input voltage(i.e.,the control command v)exceeds its maximum limit.This input voltage can not be applied in practice due to limitation of the power supply capacity.Using the proposed method in this paper,the control variable u is limited into its range,which can be applied in the actual engine control unit.

Fig.3.Control input u and control command v.

Fig.4.Reference angle θd and actual angle θ.
In Fig.3,the oscillation of the control variable u is caused by the action of the switching control signal.In Fig.4,the actual angle θ of ET can track its reference value θd.In Fig.5,the angle speed ω(t)is also regulated to zero.The closed-loop control system is stable and the tracking accuracy is satisfactory.
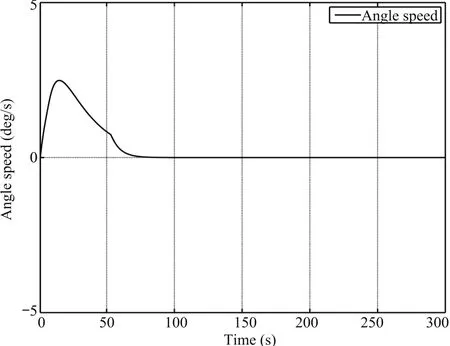
Fig.5.Angle speed ω.
In the actual control unit,the PI control method is widely used in an ET.Comparison simulation results with the conventional PI control method and the proposed control method are given in Fig.6 and Fig.7.According to Fig.6 and Fig.7,we know that the proposed control method will result in better control performance than the conventional PI control method.Therefore,we provide a new option for ET control in the vehicle industry.

Fig.6.Comparison of angle with PI control and the proposed control.
Remark 2:In the control system of automotive electronic throttle,the control input variable is the input voltage of the driving motor.The magnitude of the voltage is affected by the actual power supply capacity,that is,it must be within a certain range.In general,the certain range is[0 5].However,in the existing control methods for ET,the input signal limitation is not considered.If the input signal is too large,it cannot be applied even though the control performance is satisfactory.
V.CONCLUSIONS
In this paper,the dynamical model including the nonlinear characteristics of the return spring and friction of ET is presented.Based on the nonlinear dynamical model,an adaptive sliding-mode control strategy of ET is proposed.During the controller design process,parametric uncertainties,unknown disturbances,and input saturation constraint are adequately considered and solved.Stability of the closed-loop control system is proved via the Lyapunov stability method.From the simulation results,we know that the proposed control method can obtain satisfactory control performance with a control input that does not exceed the saturation constraint.
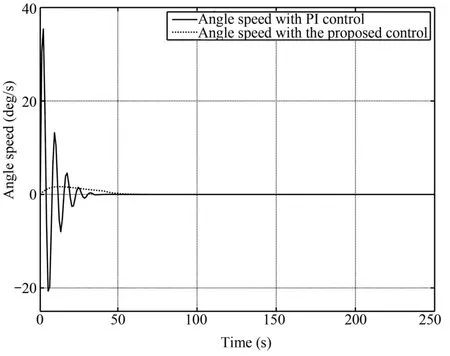
Fig.7.Comparison of angle speed with PI control and the proposed control.
APPENDIX
Substituting(36)into(35),the time derivative of V(t)is

According to the following inequality

we have

Considering K≥D≥d(t),c2>0,the inequality(37)for c1and c2,we have

Therefore,the closed-loop control system is stable according to the Lyapunov stability theory.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Polyhedral Feasible Set Computation of MPC-Based Optimal Control Problems
- The Power Allocation Game on A Network:A Paradox
- Finite Frequency Fuzzy H∞Control for Uncertain Active Suspension Systems With Sensor Failure
- Analysis of the Caratheodory’s Theorem on Dynamical System Trajectories Under Numerical Uncertainty
- Modified Cuckoo Search Algorithm to Solve Economic Power Dispatch Optimization Problems
- Robust Leader-Following Output Regulation of Uncertain Multi-Agent Systems With Time-Varying Delay