Finite Frequency Fuzzy H∞Control for Uncertain Active Suspension Systems With Sensor Failure
2018-07-31ZhenxingZhangHongyiLiSeniorMemberIEEEChengweiWuandQiZhou
Zhenxing Zhang,Hongyi Li,Senior Member,IEEE,Chengwei Wu,and Qi Zhou
Abstract—This paper investigates the problem of finite frequency fuzzy H∞control for uncertain active vehicle suspension systems,in which sensor failure is taken into account.Takagi-Sugeno(T-S)fuzzy model is established for considered suspension systems.In order to describe the sensor fault effectively,a corresponding model is introduced.A vital performance index,H∞performance,is utilized to measure the drive comfort.In the framework of Kalman-Yakubovich-Popov theory,the H∞norm from external perturbation to controlled output is optimized effectively in the frequency domain of 4 Hz-8 Hz to enhance ride comfort level.Meanwhile,three suspension constrained requirements,i.e.,ride comfort level,manipulation stability,suspension deflection are also guaranteed.Furthermore,sufficient conditions are developed to design a fuzzy controller to guarantee the desired performance of active suspension systems.Finally,the proposed control scheme is applied to a quarter-vehicle active suspension,and simulation results are given to illustrate the effectiveness of the proposed approach.
I.INTRODUCTION
NOWADAYS,vehicles have become common traffic tools,and it is of great importance to guarantee the comfort and safety of vehicles.There exists a vital part in every vehicle,i.e.the vehicle suspension system,which can isolate the vibration between its chassis and the road surface effectively to make people feel comfortable when they drive[1]-[3].A vehicle suspension system consists of a fluctuation absorber,spring and damper.The function of a fluctuation absorber is to filter the vibration between human body and road surface.The spring is responsible for bearing the weight of car body,the weight of passengers and isolating the road disturbance.Therefore,it contributes to improving ride comfort.The damper’s purpose is to reduce the destabilization between the human body and the wheels.Since ride comfort level is a crucial index to evaluate a vehicle,developing appropriate control approaches for the suspension systems has become an active research field[4],[5].
With regards to suspension systems,ride comfort level,manipulation stability,suspension deflection and actuator saturation are crucial problems,which should be tackled with control strategies.However,the requirements mentioned above are incompatible.For instance,improving drive comfort level will lead to larger suspension deflection and smaller damping in wheel bounce.Active suspension systems provide a way to address these requirements.For example,intelligent approaches,such as,adaptive method[6]-[9],neural networks/fuzzy systems[10],[11],and sliding mode control[12],[13]have been applied to such systems.Gao et al.in[14]employed the input delay method to transform the sampled suspension systems into a delayed continuous version and presented a sampled control scheme.For the unavailable states case,an output-feedback control strategy has been proposed for active suspension systems in[15],in which road holding,ride comfort,maximum actuator control force and suspension deflection were regarded as the control objectives to be satisfied.By integrating the adaptive approach into the self-organizing fuzzy sliding mode controller,the author in[16]presented an effective control strategy to ameliorate the performance of the suspension systems.The authors in[17]proposed a robust adaptive control algorithm for suspension systems in the presence of input saturation.In the framework of adaptive backstepping control,the authors in[18]designed an adaptive controller for uncertain active suspension systems and improved the system performance.Using both adaptive technique and neural networks,both a state-feedback controller and an observer-based adaptive neural controller were designed in[19].By constructing an extended sate observer,a nonlinear tracking control scheme was developed for active suspension systems in[20].
Due to the existence of uncertainty in the payload or the amount of passengers and the coupling phenomenon,the suspension systems have become complex nonlinear systems.Takagi-Sugeno(T-S)fuzzy model is a valid approach and practical tool for depicting complex nonlinear systems[21]-[26].By using T-S fuzzy model,nonlinear systems can be regarded as a summation of a set of linear subsystems with associated membership functions,which can be further analyzed by employing the linear system theory.Compared with other kinds control schemes[27],[28],T-S fuzzy model can approximate controlled systems with arbitrary accuracy.Using the fuzzy modeling approach,a sliding mode controller with adaptive parameters was designed for suspension systems in[29].To simultaneously address both input delay and actuator fault problems,the active suspension system was described as a T-S fuzzy model in[30],and a reliable fuzzy controller was designed to ensure the desired performance.
The goal of designing a control scheme for active suspension systems to enhance drive comfort level is to design a robust controller that rejects the vertical disturbance between passengers and the road surface[31].The authors in[32]applied the H∞control theory to a full-vehicle suspension model and derived sufficient conditions that ensured the robust performance of suspension systems.In[33],by utilizing a parameter-dependent controller design method,both a statefeedback controller and an output-based controller were designed,which achieved good active suspension performance.Note that these design approaches are merely considered in entire frequency domain.According to the standard ISO2361,the vertical vibration in the finite frequencies from 4 Hz-8 Hz is the most sensitive range for human body.Since H∞control is an effective approach to guarantee constrained requirements of suspension systems,therefore,how to apply the H∞control approach to active suspension systems in finite frequency domain is a significant work.Until now,there have been several techniques used for finite frequency domain control,e.g.the weighting function approach[34],and the grid frequency axis method[35].The weighting function approach is quite useful,but additional weight leads to increased complexity of systems and selecting appropriate wight functions needs much time and energy.Although the grid frequency axis method performs well in practice,it cannot guarantee the desired system performance in the design process.Another technique that addresses finite frequency problem is the generalized Kalman-Yakubovic-Popov(KYP)lemma,which builds bridges between the frequency inequality of transfer function and the linear matrix inequality(LMI)associated with state space[36],[37].It allows us to utilize the LMI to depict frequency characteristics of dynamic systems.Sun et al.in[38]presented an H∞control method for active suspension systems in finite frequency range,where the actuator input delay was taken into consideration.Considering partial unmeasurable states in suspension systems,a dynamic output-feedback control scheme was developed to stabilize the suspension systems and achieve constrained requirements in finite frequency domain[39].
It should be pointed out that it is inevitable for active suspension systems to suffer from failure due to the sensor aging and driving for a long time,which should not be neglected.Many related results have been published,see for example,[40]-[42]and the references therein.Feng et al.in[43]established a sensor failure model and proposed a dissipative reliable filtering approach to guarantee performance of filtering error systems.By constructing a reaction force observer,the fault-tolerant control problem for a flexible arm with sensor fault was solved in[44].The authors in[45]established a fault detection scheme and designed a sliding mode controller for full-vehicle suspension systems with sensor failure.However,to the authors’best knowledge,the problem of fuzzy state-feedback control for active suspension systems in finite frequency domain has not been investigated in existing literature,which is an interesting yet challenging issue.
Motivated by the discussion aforementioned,this paper focuses on the finite frequency fuzzy H∞control problem for uncertain active vehicle suspension systems.The considered active suspension system is described as a T-S fuzzy model.In the framework of generalized KYP lemma,a fuzzy statefeedback control scheme is proposed to improve drive comfort level and guarantee suspension constrained requirements.The main contributions of this paper can be summarized as follows:
1)Compared with the results in[46],T-S fuzzy model,which is an effective strategy to describe complex nonlinear systems,is applied to modeling active suspension systems in the framework of finite frequency control.Moreover,the uncertain parameters are described effectively.
2)Sensor failure,a ubiquitous issue,which can decrease,and even deteriorate the system performance,is taken into consideration to guarantee the reliability of the active vehicle suspension systems.
3)Sufficient conditions are derived to design the controller to improve the drive comfort level in concerned finite frequency domain and guarantee active suspension constrained requirements.
Finally,simulation results are provided to demonstrate the usefulness of the control scheme proposed in this paper.
The rest of this paper is as follows.Section II provides problem formulation.The main results are presented in Section III.Simulation results are given in Section IV to demonstrate the validity of the control method.The conclusion is given in Section V.
Notations:The superscripts T and-1 are employed to denote the matrix transposition and inverse,respectively.The orthogonal complement of matrix P is represented by P⊥.The block diagonal matrix is expressed by diag{...}.The symbol[A]sis equivalent to A+AT.I and 0 stand for the identity and zero matrix with appropriate dimensions,respectively.P>0 is adopted to represent that P is a positive definite matrix.The mark(?)is utilized to denote the term which has a symmetric property.{·}θ(θ=1,2,...)means the θ-th line of a matrix.If the dimension of a matrix is not described in details,we assume that it has an appropriate dimension.
II.PROBLEM FORMULATION
Targeted at proposing a reliable fuzzy finite frequency control strategy,this section introduces some lemmas which will be utilized in this paper,describinges a quarter-vehicle model,models uncertain vehicle suspension systems,establishes a sensor failure model and provides control objectives of active suspension systems.Next,the corresponding descriptions will be presented.
The following lemmas correspond to the Generalized KYP lemma,Projection theorem and Reciprocal Projection theorem.
Lemma 1[47]:Given a linear system( A, B, C, D)and a symmetric matrix Γ,the following conditions are equivalent,
1)The following finite frequency inequality holds,

2)There exist a symmetric matrix P and a positive definite matrix Q such that

where

Lemma 2[48]:For the given matrices Θ,Γ,Λ,there is a matrix F such that

if and only if the following inequalities hold,

Lemma 3[48]:The inequality Υ+ϑ+ϑT< 0 is equivalent to the following form

where P is a given positive definite symmetric matrix.
A.Description Of A Quarter-Vehicle Model
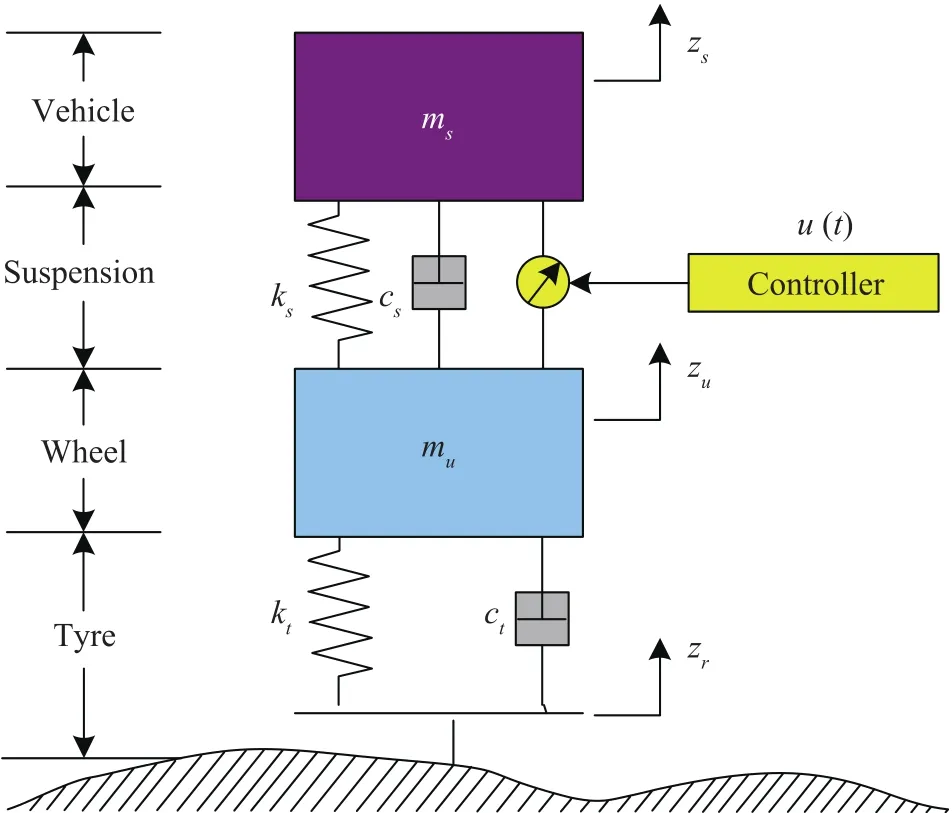
Fig.1.Quarter-vehicle model with an active suspension.
In this paper,the quarter-vehicle model depicted in Fig.1 is considered,which is governed via the following equations,

where the sprung mass msand the unsprung mass mudenote the car chassis and the mass of the wheel assembly,respectively.u(t)is the actuator force.cs,ks,kt,ct,zsand zudenote damping and stiffness of the suspension system,compressibility and damping of the tyre,and the movements of the sprung and unsprung masses,respectively.zrrepresents the road movement input.
In order to facilitate describing the above equations in the state space form,define the following variables,

where x1(t)is the suspension deflection,x2(t)stands for the tyre deflection,x3(t)and x4(t)denote sprung mass speed and unsprung mass speed,respectively.By choosing speed input as disturbance input,we have w(t)=˙zr(t).Define

Thus,the quarter-vehicle model can be described as
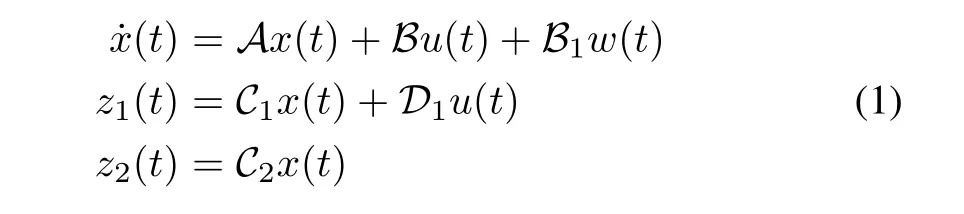
where

B.T-S Fuzzy Modelling
The vehicle mass is regarded as a varying parameter since vehicle load is often uncertain due to variation in the payload or the number of passengers.Based on the mechanical structure,the unsprung mass is assumed to be a varying parameter.Accordingly,the vehicle suspension system including both the sprung mass msand the unsprung mass muin(1)is an uncertain model.Assuming that they vary in a given range,that is
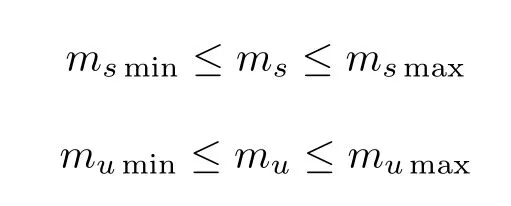
the following equalities can be obtained,
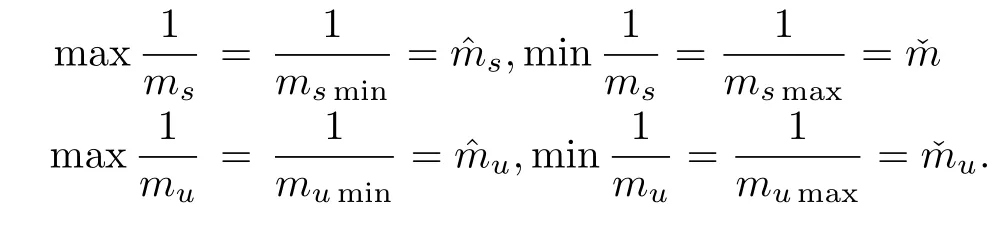
where φ1(t)=denote premise variables,and

In order to establish the fuzzy model,the membership functions can be described as

The membership functions named Heavy,Light,Heavy and Light are depicted in Fig.2.The following T-S fuzzy model depicts the active suspension systems with uncertainty.

Fig.2.(a)Membership functions M1(φ1(t))and M2(φ1(t));(b)Membership functions N1(φ2(t))and N2(φ2(t)).
Model Rule i:IF φ1(t)is Mθ(φ1(t)),and φ2(t)is Nθ(φ2(t)),THEN
where θ=1,2,i=1,...,4.M1(φ1(t))represents Heavy and M2(φ1(t))represents Light;N1(φ2(t))represents Heavy and N2(φ2(t))represents Light.
According to fuzzy blending,the whole fuzzy model can be shown as follows:

where
ωi(φ(t))represents the grade of membership satisfying

For brevity,we define ωi= ωi(φ(t)),i=1,...,4,in the following analysis.
C.Sensor Failure
Due to the extreme working environment,aging of machinery and overtime operation,it is inevitable for active suspension systems to undergo failure.To address it thoroughly and improve the reliability,the failure model is described as[23],

where

with 0 ≤ βεj≤ 1.βεjdenoting the sensor failure coefficient.
Remark 1:For the lower and upper boundsthe details can be consulted from[23],[40].
Then,one can obtain

where
D.Fuzzy State-Feedback Control
This subsection constructs a fuzzy controller for system(1)in the framework of T-S fuzzy model.
Control Rule i:IF φ1(t)is Mθ(φ1(t)),and φ2(t)is Nθ(φ2(t)),THEN

The overall fuzzy controller is shown as follows,

Based on(2),(3)and(4),the closed-loop system can be obtained,
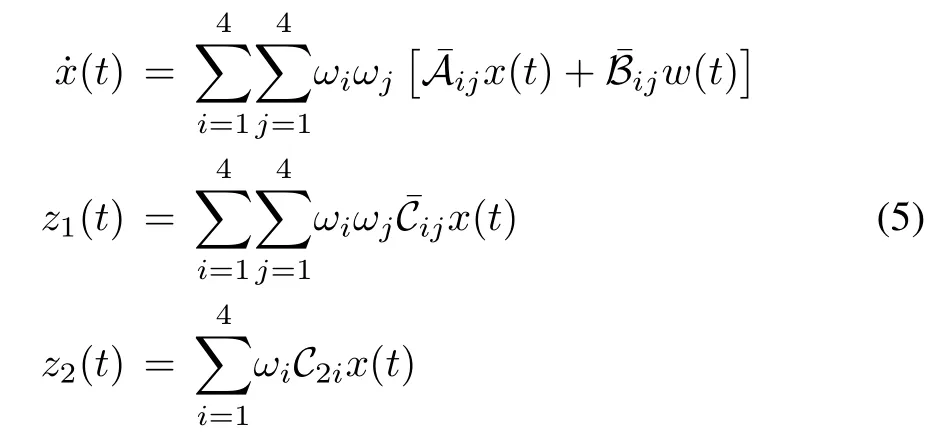
where

E.Control Objectives
In the process of designing an active suspension system controller,the ride comfort is the first factor which should be considered.According research of body acceleration,the frequency between 4 Hz-8 Hz is the most sensitive range for human body.Therefore,it is necessary to minimize the the transfer function from disturbance w(t)to the controlled output z1(t)to improve the drive comfort.Denote the transfer function from w(t)to z1(t)as Ψ(jσ).Thus,the finite frequency H∞control problem is to propose a fuzzy control scheme such that the following inequality holds for all nonzero w(t)∈ L2[0,∞),

where γ means a predefined positive constant,and define the upper and lower bounds of the concerned frequency asandrespectively.Meanwhile,the following three constrained requirements should be guaranteed:
1)In order to improve drive stability,the dynamic load is less than static load

2)Considering the limitation of vehicle mechanical structure,the suspension deflection is allowed to change in a specified range,that is

3)Considering the limitation of vehicle engine power,there exists output saturation in the actuator.Thus,the output force must be restricted within

III.MAIN RESULTS
In this section,sufficient conditions are provided to guarantee that the closed-loop system(5)is asymptotically stable and satisfies the desired performance requirements.
Theorem 1:For the given scalars γ,η,δ and control gain Ki,provided that there exist symmetric matrixes P,P1>0,Q>0 and general matrix F,such that the following conditions hold for i,j=1,...,4,
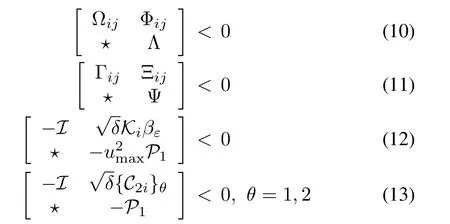
where
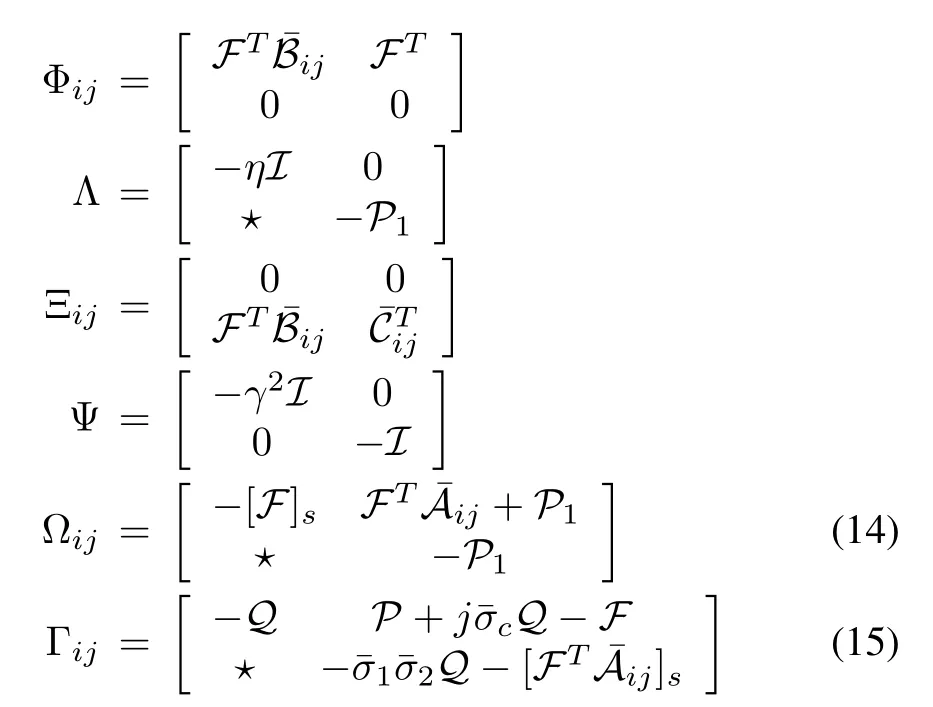
Proof:Consider the following Lyapunov function

where P1is a positive definite symmetric matrix.Its derivative can be obtained as follows,

By employing the Schur complement,inequality(10)can be converted into

Defining matrix W-1=F,and utilizing the congruence transformation on(17)by diagit can be found that

Letting

by adopting Lemma 3,it is easy to find that the following inequality holds,

then

which implies

According to(16)and(19),we can obtain that˙V(t)<0.Accordingly,the closed-loop system(5)with w(t)=0 is asymptotically stable.
Next,the proof of finite frequency H∞performance is shown.
According to Schur complement,(11)can be rewritten as

where

Based on Lemma 2,through(20),the following two inequalities hold,

where

Based on(21),the following inequality can be obtained,


Thus,the following inequality holds,Utilizing Schur complement,(22)can be transformed into the following form,

According to Lemma 1,(23)is equivalent to the expression in(6).
Computing the derivative of the Lyapunov function yields

Due to

by employing(18)and(24),the following inequality holds,

Integrating(25)on both sides from 0 to t,it can be obtained that

Therefore,the following inequality can be obtained,

Consider the control input
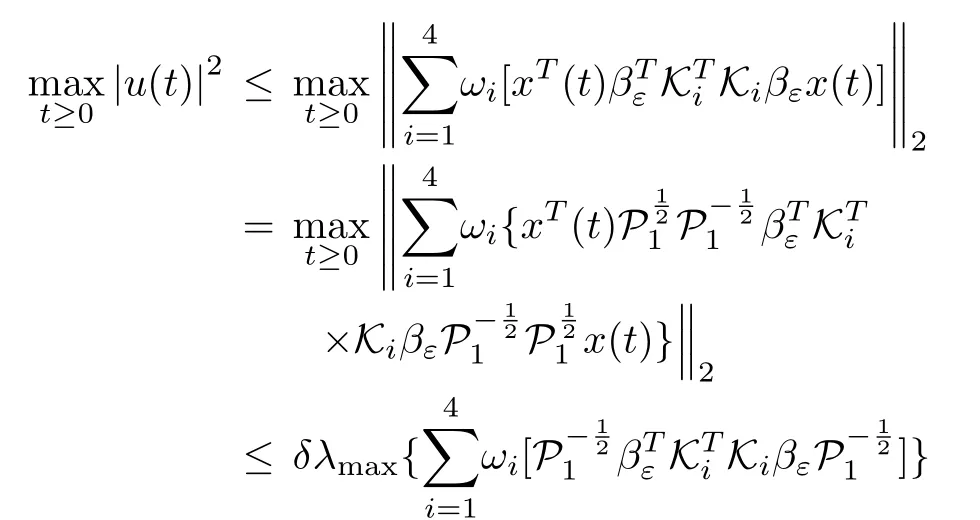
and the constrained output

where λmax{·}is the maximum eigenvalue.Then,the constrained requirements(7),(8)and(9)are guaranteed if the following two inequalities hold,


Using the Schur complement,(12)and(13)are equivalent to(26)and(27),respectively.
Note that in(14)and(15),the term FTcontains coupling term FTBiKj,and it cannot be directly solved by MATLAB LMI tool.Hence,the synthesis conditions are proposed in the following content.
Theorem 2:For the given constants γ,η,δ,and,provided that there exist symmetric matrixes>0,ˆQ>0 and general matrixsuch that the following inequalities hold for i,j=1,...,4,
where

Moreover,the control gain Kj,j=1,...,4 is given by

Proof:Define J1= diag{Θ-1,Θ-1,I,Θ-1},J2=diag{Θ-1,Θ-1,I,I},J3=diag{I,Θ-1}.Pre-and postmultiplyand the transpositions of(10)-(19),respectively.Define

Thus,(28)-(31)can be obtained.
Remark 2:It should be pointed out that the work[14],[17],[38],[39]failed to address the fuzzy control problem of active suspension systems in finite frequency domain.Until now,there are few relevant results.Combining T-S fuzzy model and finite frequency domain approach,Theorem 2 gives the sufficient conditions to design a state-feedback controller for active suspension systems,and the performance of the active suspension system can be improved effectively.
Remark 3:Obviously,the inequalities in(28)-(31)cannot be solved directly because there exist complex variables in(29).Inspired by the results in[50],the inequality with complex variables can be converted into a real variable with distensible dimension.This implies

is equivalent to
which means that(29)can be addressed by the above approach.
IV.SIMULATION RESULTS
In this section,the proposed fuzzy H∞control strategy in finite frequency domain is applied to a quarter-vehicle model to demonstrate its validity.
Consider the quarter-vehicle model shown in Fig.1.Its parameters are presented in Table I.Assume sprung mass msis defined as[780 kg,1020 kg]and unsprung mass is defined as[45 kg,55 kg].Given the scalarsσ1=4 Hz(8π rad/s),σ2=8 Hz(16π rad/s),δ=1,η=1×103,zmax=0.1 m,umax=2000 N.The failure matrix is defined as follows:


TABLE IQUARTER-VEHICLE MODEL PARAMETERS
By solving LMIs(28)-(31),in the case of optimal γ(γmin=3.9984),the control gains can be obtained as

After obtaining control gains,we illustrate the effectiveness of the control method proposed in this paper.Fig.3 describes the responses of body vertical acceleration in the frequency domain in the open and closed-loop system.Obviously,compared with the frequency response in the open-loop system,the counterpart in the closed-loop system(5)under control has the minimum value of H∞norm between the frequency range 4-8 Hz,which clearly illustrates that ride comfort level has been improved.
In view of the evaluation of active suspension characteristics with respect to the three performance requirements(7),(8)and(9),the road disturbance signal is given as follows,

with A,f,and T denoting amplitude,frequency and period,respectively.Define A=0.1 m,f=5 Hz(in the frequency range 4 Hz-8 Hz)and T=0.2 s(T=1/f).Fig.4 shows the body vertical acceleration for active suspension systems,and it can be obtained that the body acceleration under control in finite frequency is less than that of the open-loop system.Fig.5 demonstrates the ratio of suspension deflection where the maximum limitation is less than 1,which satisfies the performance constrained requirements.Fig.6 plots the ratio of dynamic tyre load and static load,which shows that the ratio is strictly less than 1.Fig.7 shows that the actuator force is less than the umax=2000 N.In order to highlight the advantage of finite frequency control strategy,we give comparisons of vertical body acceleration between the entire frequency range and the finite frequency that are presented in Fig.8.It can be observed from Fig.8,vertical body acceleration under finite frequency control is more stable than entire frequency control,which demonstrates the effectiveness of the proposed strategy.
According to these simulation results,it is obvious that the finite frequency fuzzy H∞control design algorithm not only guarantees the stability of active suspension systems,but also improves drive comfort level and achieves suspension constrained requirements effectively.
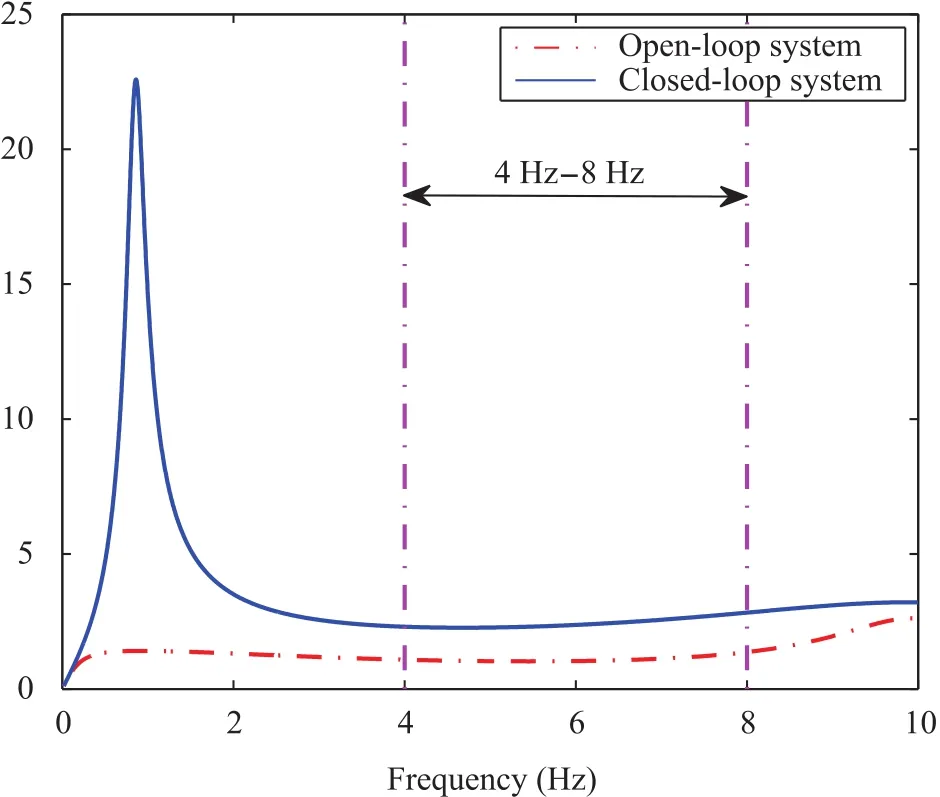
Fig.3.Responses of body vertical acceleration in frequency domain.

Fig.4.The body acceleration for active suspension system.
V.CONCLUSION
This paper has studied the fuzzy H∞control problem for uncertain active suspension systems subject to sensor failure in the finite frequency domain.Using T-S fuzzy model,active suspension systems with uncertainty have been described as a fuzzy model.The H∞performance index has been adopted to measure drive comfort level.Based on the KYP lemma,the optimized objective,that is,to minimize the H∞norm from disturbance to controlled output has been achieved.At the same time,three suspension constrained requirements have also been ensured.Moreover,sufficient conditions have been derived to design the fuzzy controller that guarantees the desired performance of the active suspension systems.Finally,simulation results have been presented to validate the effectiveness of the proposed control method.

Fig.5.The ratio of suspension deflection and the maximum limitation.
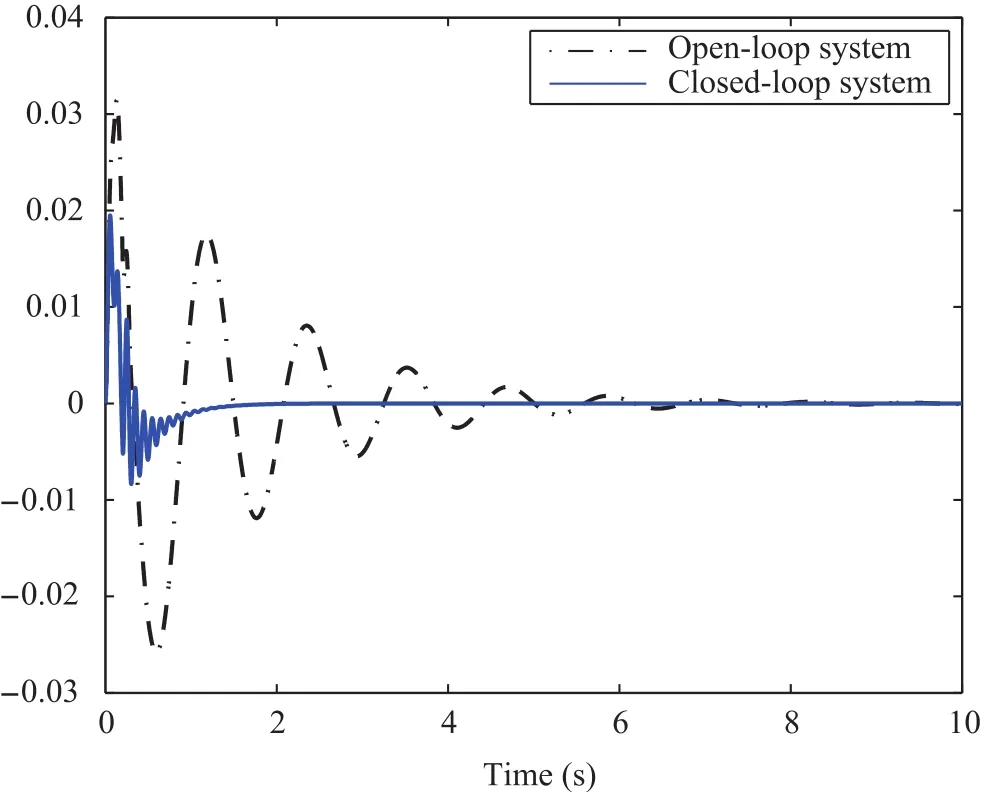
Fig.6.The ratio of dynamic tyre load and static load.

Fig.7.The actuator force.
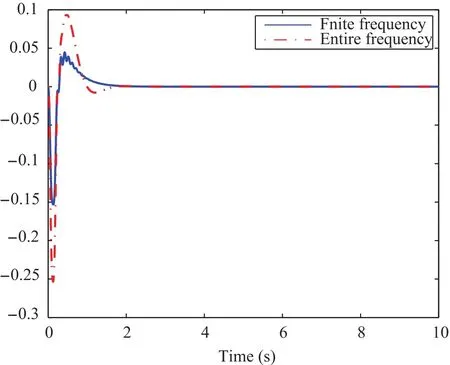
Fig.8.The time-domain response of body acceleration.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Polyhedral Feasible Set Computation of MPC-Based Optimal Control Problems
- The Power Allocation Game on A Network:A Paradox
- Analysis of the Caratheodory’s Theorem on Dynamical System Trajectories Under Numerical Uncertainty
- Modified Cuckoo Search Algorithm to Solve Economic Power Dispatch Optimization Problems
- Robust Leader-Following Output Regulation of Uncertain Multi-Agent Systems With Time-Varying Delay
- A Matrix Approach to the Modeling and Analysis of Networked Evolutionary Games With Time Delays