Robust Adaptive Control for Robotic Systems With Input Time-Varying Delay Using Hamiltonian Method
2018-07-31YongRenandWeiweiSun
Yong Ren and Weiwei Sun
Abstract—This paper addresses the problem of robust adaptive control for robotic systems with model uncertainty and input time-varying delay.The Hamiltonian method is applied to develop the stabilization results of the robotic systems.Firstly,with the idea of shaping potential energy and the pre-feedback skill,the n degree-of-freedom(DOF)uncertain robotic systems are realized as an augmented dissipative Hamiltonian formulation with delay.Secondly,based on the obtained Hamiltonian system formulation and by using of the Lyapunov-Krasovskii(L-K)functional method,an adaptive controller is designed to show that the robotic systems can be asymptotically stabilized depending on the input delay.Meanwhile,some sufficient conditions are spelt out to guarantee the rationality and validity of the proposed control law.Finally,study of an illustrative example with simulations shows that the controller obtained in this paper works very well in handling uncertainties and input delay in the robotic systems.
I.INTRODUCTION
A S we all know,time delay in the control input is a pervasive problem in various control applications.Robotic systems with no exception encounter delays which make the control systems more complicated.With the widespread application of communication networks in interconnecting robotic systems and controllers,the flexibility of the robotic systems and the communication distance is increasing,which can lead to the emergence of time delay in the acting force.The presence of time delay in control input is often attributed to deteriorate the effectiveness of associated control systems and is often a cause of instability.Therefore,it is necessary to evaluate the impact of time delay on robotic systems.During the last few decades,the study of control design for the timedelay robotic systems has drawn a great deal of attention and many nice results have been proposed(see[1]-[7]and the references therein).A control law for teleoperators was presented in[1]which overcame the instability caused by time delay.Using the method of proportional-differential(PD)fractional control,Lazarevi in[4]studied the problem of finite time stability for robotic time delay systems.The classical set-point control problem for rigid robots with inputoutput communication delays was addressed in[5].The paper demonstrates that if there are transmission delays between the robotic system and the controller,then the use of the scattering variables can stabilize an unstable system with arbitrary unknown constant delays.
In addition to time delay,there always exist a variety of uncertainties in the robotic control systems[8]-[11].These uncertainty factors can be divided into two kinds:one is internal uncertainty,such as parametric uncertainties,payload uncertainties,model uncertainty,unmodeled dynamics characteristics and so on;the other is external uncertainty,such as external disturbance,etc.These uncertainties may pose significant impediments to the stabilization problem and potentially degrade the performance of the closed loop system.Therefore,in order to get a better performance of control,these factors cannot be ignored.By using adaptive fuzzy logic,Kim[10]studied output feedback tracking control of robotic systems with model uncertainty.The tracking control problem was concerned in[11]for robotic systems perturbed by timevarying parameters,unmodelled dynamics and external force(and moment)disturbances.Other important research progresses about robotic system control subject to uncertainties can be found in[12]-[14]and the references therein.
In recent years,Hamiltonian method has been one of effective methods in studying stability and the problem of control for some practical systems,including robotic systems.And many good results have been achieved[15]-[20].A key step in using Hamiltonian strategy is to express the system under consideration as a dissipative Hamiltonian system which was firstly put forward by Maschke and Van der Schaft in[21].The method,in general,can thoroughly use the internal structure properties of real systems during control designs,and the controllers designed by this method are relatively simple in form,easy and effective in operation[22]-[24].To obtain the dissipative Hamiltonian system,we first need to express the system as a generalized Hamiltonian system,which is the so-called generalized Hamiltonian realization and then eliminate the non-dissipative part of the obtained generalized Hamiltonian realization by a suitable state feedback.Wang and Ge in[24]provided an augmented dissipative Hamiltonian structure for both fully actuated and underactuated uncertain mechanical systems.Besides,[24]has also investigated the energy-based robust adaptive control for the uncertain mechanical systems by using the new Hamiltonian formulation.But[24]did not consider the effect when delays inevitably appear in the systems.
Hence,in order to solve the problem of time delay,this paper investigates a robust stabilization problem for a class of uncertain robotic systems with input time-varying delay based on the Hamiltonian method.Firstly,we find a nice delayed Hamiltonian system structure to describe the dynamic action of the robotic systems with time-varying delay.Secondly,we show how to design an adaptive controller based on the obtained Hamiltonian systems which makes the resultant feedback system asymptotically stable.Moreover,the adaptive feedback controller for the uncertain delayed robotic systems is also given.Finally,an illustrative example is presented to show the effectiveness of the method proposed in this paper.
The rest of the paper is organized as follows.Section II presents the problem formulation and some preliminaries.In Section III,we study the augmented delayed Hamiltonian formulation for uncertain robot manipulators with time-varying delays.The analysis of robust adaptive control of the delayed Hamiltonian system is presented in Section IV.Section V illustrates the obtained results by a two-link robot manipulator example,which is followed by the conclusion in Section VI.
Notations:R stands for the set of real numbers;Rndenotes the n-dimensional Euclidean space and Rn×mis the real matrix space with dimension n×m;‖·‖stands for either the Euclidean vector norm or the induced matrix 2-norm.The notation X≥0(X>0)means that the matrix X is positive semidefinite(X is positive definite).⊗represents the Kronecker product.[·]0denotes the derivative of the variable inside the square bracket.A class-K function α :[0,a) → [0,∞)means that it is strictly increasing and α(0)=0.H ess(H(x))represents the Hessian matrix of H(X).What’s more,for the sake of simplicity,we denoteby ∇H(x)andby∇H(xt),respectively.Throughout the paper,a time-dependent delayed function is denoted by ζ(t-d(t))or ζt.
II.PROBLEM FORMULATION
Consider the following n-DOF robotic system described by the Euler-Lagrange equation in the horizontal plane[25],[26]

where q(t)∈Rnis the vector of generalized configuration coordinates,˙q∈Rnis the velocity vector,τ∈Rnis the control torque vector acting on the system,M(q) ∈ Rn×nis the positive definite inertia matrix,G(q)∈Rndescribes the potential forces and C(q,˙q)˙q∈Rndescribes the vector of Coriolis and centripetal forces.M(q),C(q,˙q),G(q)are assumed to have unknown constant parameters.G(q)is subject to the following assumption.
Assumption 1:The unknown part in G(q)depends linearly on a constant vector θ ∈ Rl,i.e.,there exist matrices Λ ∈ Rn×nand Λ1(q)∈ Rn×lsuch that

where q0is the target position.
Moreover,the above equations exhibit certain fundamental properties due to their Lagrangian dynamic structure.
Property 1:The inertia matrix M(q)is symmetric positive definite and there exist positive constants m and M such that

We consider the existence of time-varying delays in the input signals applied to the robot joints.Let d(t)be the time delay involved in every component of the input vector which satisfies

and

where h andµare positive scalars.The input delay is denoted by τ(t-d(t))which illustrates the impacts of local input signals and remote signals.Thus,under the presence of time delay,the control model of the robotic system(1)can be rewritten as follows:

Our aim in this paper is to investigate the robust adaptive control problem of system(6)in the presence of input delay such that all signals in the closed-loop system are bounded and all bounded trajectories converge to the largest invariant set where˙q(t)≡0 and consequently limt→∞(q(t)-q0)=0.The robustness of the closed-loop system is intended to be obtained under the Hamiltonian system framework.The methodology is also called the energy-based approach and should contain the following two procedures:1)Hamiltonian realization,i.e.,to express the robotic system with input delay as the form of a time-delay dissipative Hamiltonian system,and 2)analysis and synthesis of the obtained time-delay Hamiltonian system.
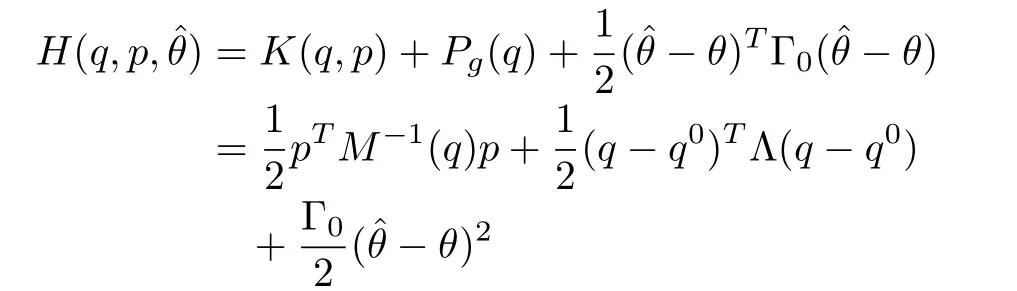
Under Assumption 1,we consider a Hamilton function for system(6)as follows:

where

is the system’s kinetic energy,

is the so-called virtual potential energy,Λ ∈ Rn×nand Γ0∈Rl×lare constant positive definite matrices;ˆθ is the estimate of θ,q0∈ Rnis the target position which is to be designed,p∈Rnis the generalized momenta.It is easy to see that H(q,p,ˆθ)is positive definite with respect to(q,p,ˆθ)and H(q,p,ˆθ)=0 if and only if q=q0,p=0,ˆθ=θ.
Obviously,we have

which means

Let X=(qTpT)T∈R2n+l,we can verify that the choice of H(X)above satisfies the following property.
Property 2:H(X) ∈ C2and ϵ1(‖X‖) ≤ H(X) ≤ϵ2(‖X‖).Besides,the Hessian matrix H ess(H(X))of H(X)satisfies ν21≤ ‖H essT(H(X))·H ess(H(X))‖ ≤,where ϵ1,ϵ2are class-K functions,ν1,ν2are positive scalars.
We conclude this section by recalling some auxiliary results to be used in Hamiltonian realization of system(6)and the robust controller designed in this paper.
Lemma 1[24]:Assume that A(x)∈ Rn×n(x ∈ Rn)is a function matrix,α,β ∈ Rnare constant vectors.Then,

Lemma 2[27]:For any positive-definite matrix Z ∈ Rn×nand vector function w:[-h,∞)→Rn,the following integrals are well defined
Lemma 3[28]:The linear matrix inequality(LMI)

is equivalent to Λ1(x)-Λ2(x)Λ-13(x)> 0 and Λ3(x)> 0,where Λ1(x)=(x),Λ3(x)=(x)and Λ2(x)depends affinely on x.
Remark 1:The derivative of the time-varying delay d(t)satisfies 0≤˙d(t)≤µ<1 which has its own physical meaning.It means that the changing rate of delay is slower than that of time.In practice,it is impossible that the increasing of delay is faster than the moving of time.The condition is standard as shown in the time-delay system stabilization analysis(see e.g.,[29]-[33]).
III.DELAYED HAMILTONIAN FORMULATION
According to Lemma 1 and(7),we get

From system(6)and(11),the derivative of p along the time t satisfies

In order to get a nice Hamiltonian structure for system(6),we design a pre-feedback law as follows:

Substituting(15)into(6)and considering(10)-(14),we obtain
where
Since

holds,we can prove that Kc(q,p)≡0 by using the properties of the Kronecker product.The details of the proof can be found in[24].
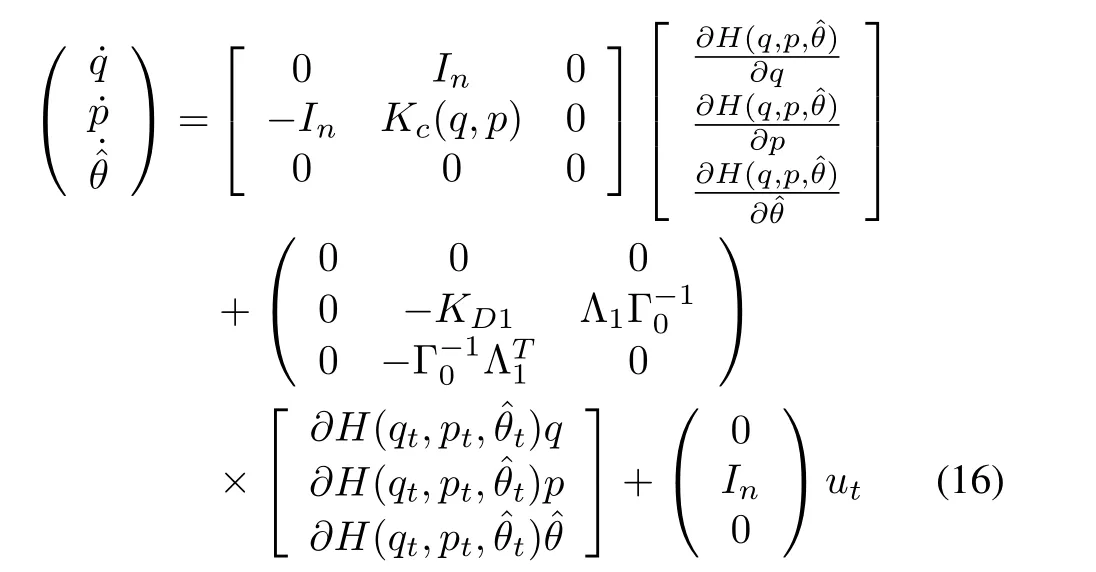
Thus,system(6)can be transformed into the following delayed port-controlled Hamiltonian system
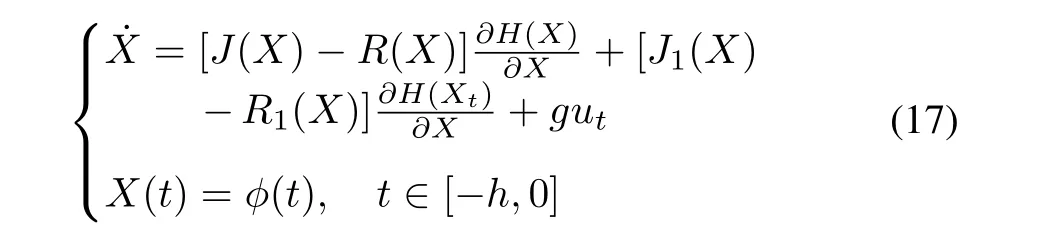
where X=(qTpTˆθT)T∈R2n+l;Xt:=X(t-d(t));φ(t)is a continuous vector-valued initial function,


Obviously,J(X)=-JT(X),J1(X)=-(X);R(X),R1(X)≥0.
Summarizing the above,we have the following theorem.
Theorem 1:Consider the robotic system(6)with input delay and Assumption 1.With the Hamilton function(7)and the adaptive pre-feedback law(15),system(6)can be transformed into a delayed Hamiltonian system described as(17).
IV.ADAPTIVE CONTROL
In this section,we study the adaptive control problem of the uncertain robotic system(6)with input delay by using the equivalent delayed Hamiltonian formulation(17).
Considering a feedback controller ut=-K gT∇H(xt)for system(17),we have the following result:
Theorem 2:For a given scalar h>0,if there exists a matrix K=KTwith proper dimension such that

where
then the delayed Hamiltonian system(17)under the output feedback control ut=-K gT∇H(xt)is asymptotically stable.
Proof:Substituting ut=-K gT∇H(xt)into(17),the closed-loop system can be written as

For the sake of simplicity,we denoteby ∇H(X)andby∇H(Xt)in the sequel.
Construct a Lyapunov functional candidate as follows:

where
Since the Hamilton function H(X)defined in(7)is positive definite and Property 2 holds,we can get

According to the Newton-Leibniz formula,we have

Then system(19)can be rewritten as

Computing the derivatives of V1and V2along the trajectory of the closed-loop system(23)respectively,we obtain

According to Property 2,by replacingwith(J-R)×∇H(x)+(J1-R1-g K gT)∇H(xt)and using Lemma 2,we can get

Then the following inequality about(Xt)holds
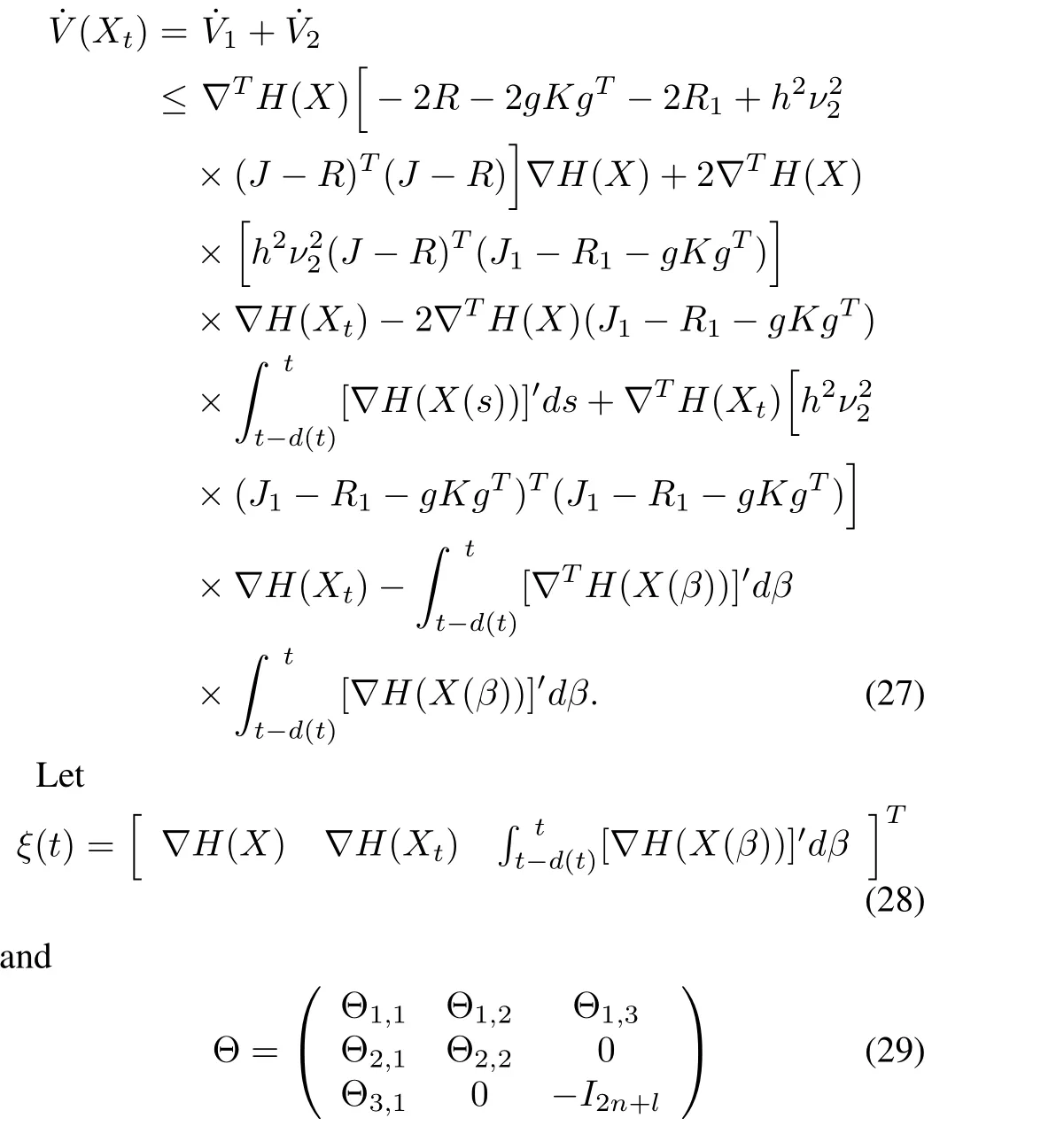
with
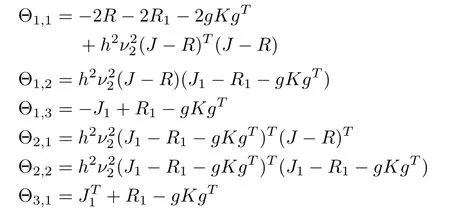
further obtain

Due to Ξ < 0,we can easily prove that Θ < 0 by using Lemma 3.Thus we obtain Hamiltonian system;and 2)how to design the adaptive controller for the delayed robot systems under Hamiltonian system framework.A planar two-link manipulator with two nodes in the vertical plane is considered as shown in Fig.1,where we assume that the mass mpof payload is unknown,miand liare the mass and length of link i,respectively,lciis the distance from node i-1 to the center of mass of link i,Iiis the moment of intertia of link i about an axis orthogonal to page through the center of the mass of link i,i=1,2[35].
where ρ= λmin(-Θ).
By Lyapunov-Krasovskii stability theorem[34],we can conclude that system(17)under the output feedback control law ut=-K gT∇H(Xt)is asymptotically stable.
From Theorem 1,since(17)is an equivalence transformation of uncertain delayed robotic system(6)under the pre-feedback law(15),the controller ut=-K gT∇H(Xt)is a part of asymptotically stable control law of system(6)provided Assumption 1 holds.We summarize the result by the following corollary.
Corollary 1:Consider the uncertain delayed robotic system(6).Suppose Assumption 1 holds.For a given scalar h>0,if there exists a matrix K=KTwith proper dimension such that(18)holds,then the adaptive feedback controller

can asymptotically stabilize system(6),where X=(qTpT)T;the Hamilton function H(X)is defined as(7);other notations and significances are the same as those in(15)and(17).
Remark 2:It is necessary to point out that the result obtained in this paper is different from that in[34].Apart from the differences of the delays,there exist essential differences between the two controllers in[34]and this paper.In[34],the control signals under consideration include two parts:the local control signal and the remote one.However,we only need the information(t-d(t))to solve the control input proposed in this paper.Compared with[34],the control strategy in this paper is more reasonable.
V.ILLUSTRATIVE EXAMPLE
In this section,we give an example to show:1)how to transform the robot manipulator with time delay into delayed
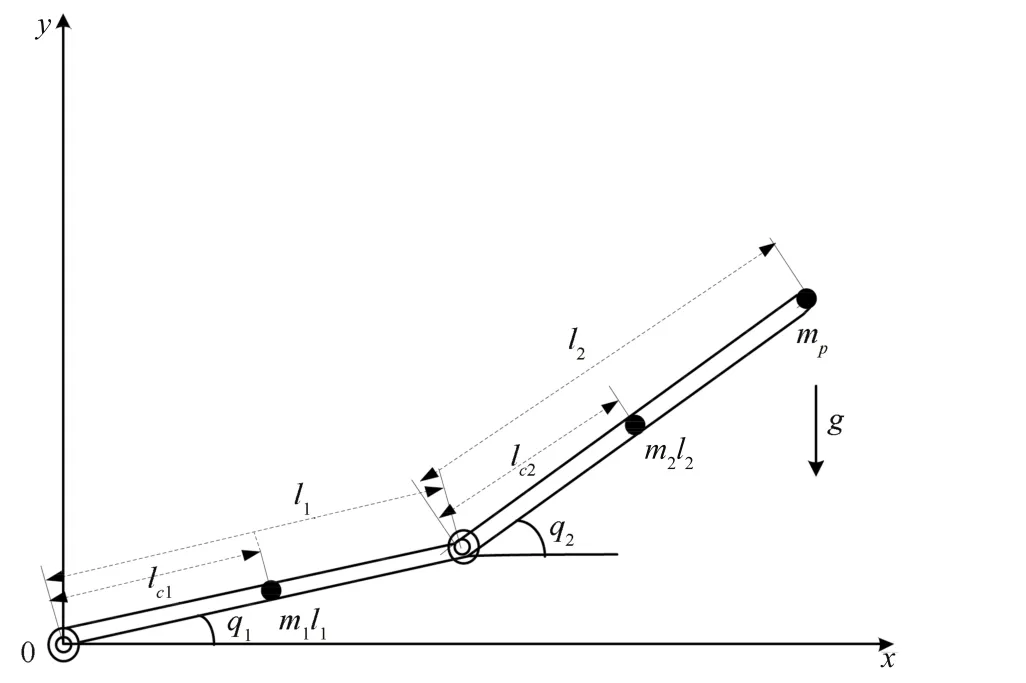
Fig.1. Planar two-link manipulator with payload.
Assume there exist delays in the input signals,

where q=(q1q2)T∈ R2is the angular position vector,τt∈R2is the control torque.

Because the payload’s mass mpis unknown,we can see that M(q),C(q,˙q)and G(q)are not exactly known.Next,we transform system(33)into a delayed Hamiltonian system according to Theorem 1.
Let θ:=mp,which denotes the unknown parameter,then G(q)can be written as

where


Consider
as the Hamilton function and

The pre-feedback law can be designed as follows:

where KD1=diag{kd11,kd22}>0.
According to Theorem 1,by the Hamilton function(35)and the pre-feedback law(36),system(33)can be transformed into the following delayed Hamiltonian system

where X=(q1q2p1p2T∈R5,R(X)=0,
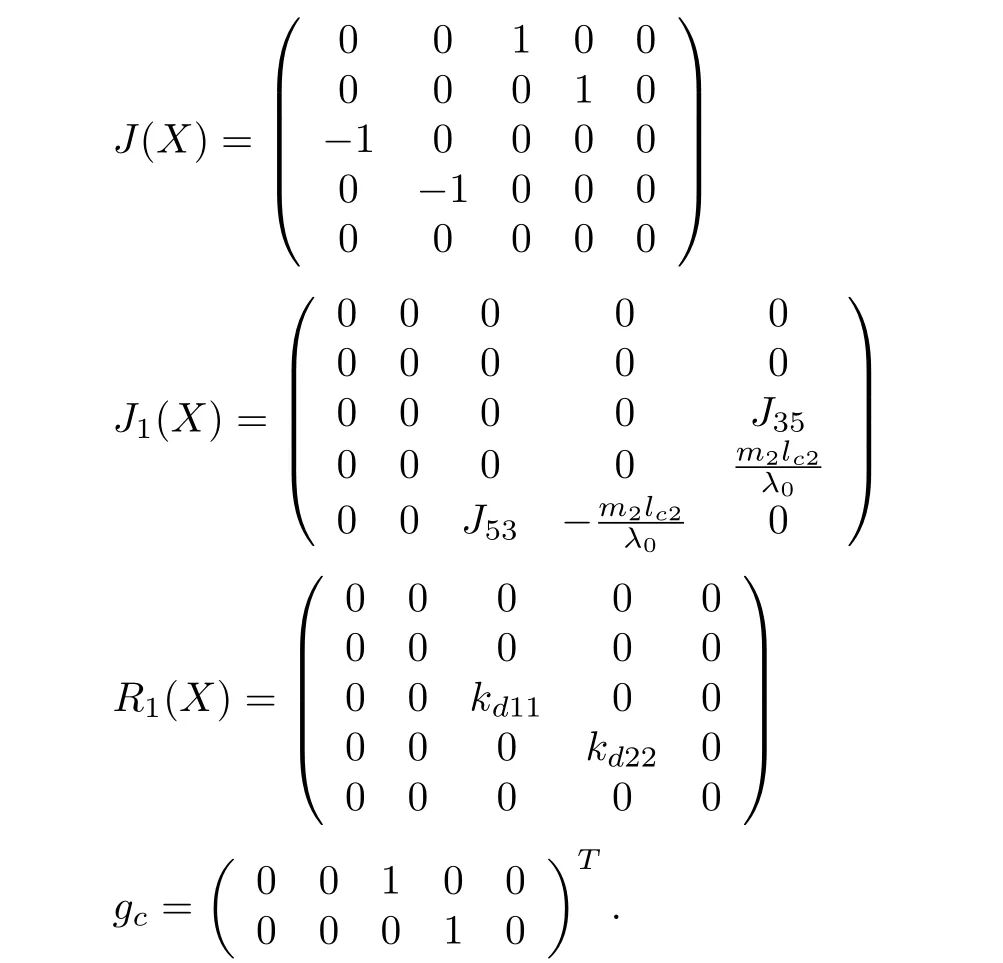
Obviously,J(X)=-JT(X),J1(X)=-(X),R(X)≥ 0,R1(X)≥ 0,J35=(m1lc2+m2l1)/λ0,J53=-(m1lc2+m2l1)/λ0.
It is easy to verify that the Hamilton function in system(37)satisfies Assumption 1.In addition,according to Properties 1 and 2,the Hessian matrix of H(X)satisfies‖H essT(H(X))×H ess(H(X))‖≤(λ+4M2‖˙q‖2)2m-4,so we can choose ν2=(λ+4M2‖˙q‖2)λ0m-2,where λ=max{m1lc2+m2l1,m2lc2}.
In the following,we illustrate whether the output feedback controller ut=-K gT∇H(Xt)can stabilize system(37)according to Theorem 2.Choosing KD1=diag{kd11,kd22},we obtain,
where
Thus,the stabilization controller can be expressed as

where
Therefore,an adaptive controller of system(33)

can be expressed as follows:

In order to show the effectiveness of controller(39),simulation is carried out for system(33)whose physical parameters are the same as those in[35].The target point q0=(4.05 3.75)Tis considered.X0=(4.0 2.0)Tis considered as the initial condition of system(33).
A time-varying delay is considered as d(t)=(3+2 sin t)/6.Obviously,0≤d(t)≤5/6 and 0≤˙d(t)≤1/3<1.Therefore,we may choose h=0.84,µ=0.34.
Figs.2-5 are the responses of the system with the timevarying delay d(t)=(3+2 sin t)/6.Fig.2 shows the conver-gence of the joint angle position q;Figs.3 and 4 depict the control signal τ used here and the estimate of the payload mp,respectively;Fig.5 shows the control signal u for system(37).

Fig.2. Responses of joint angle position q1 and q2.
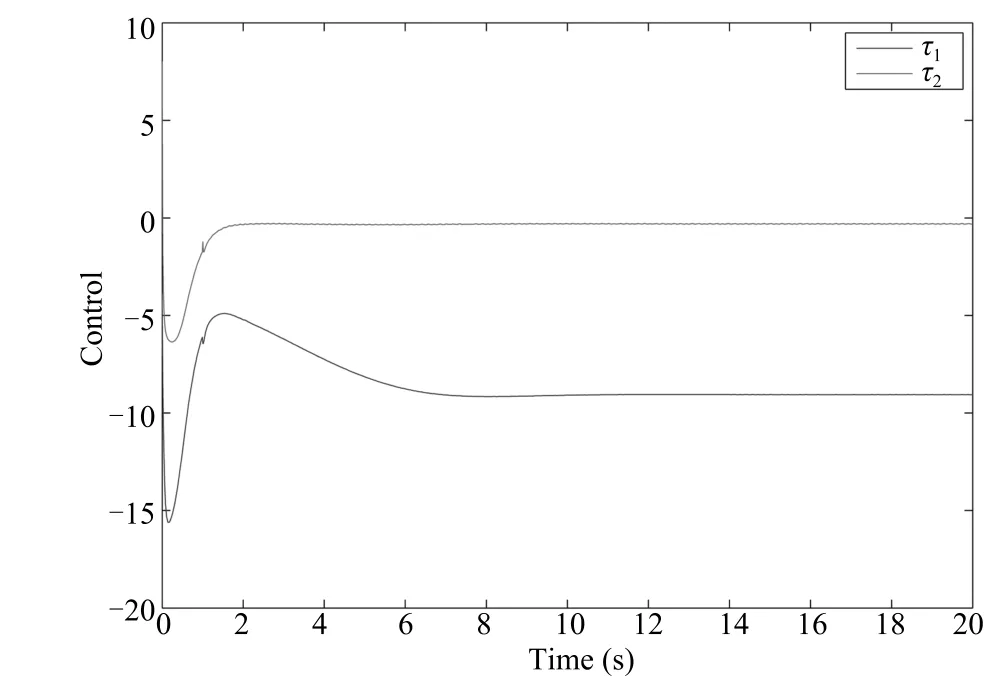
Fig.3.Control τ with the delay d(t)=(3+2 sin t)/6.

Fig.4.Estimate with the delay d(t)=(3+2 sin t)/6.

Fig.5.New control u with the delay d(t)=(3+2 sin t)/6.
The above simulation results demonstrate that the energybased robust adaptive controller(39)is effective for the control of position and velocity,and for dealing with both unknown parameters and time delays.Furthermore,fast convergence of the controller τ can give us an evidence that it is effective for the control of the delayed robotic systems described as(6).
VI.CONCLUSION
In this paper,the stabilization of uncertain robotic systems in the presence of input delay has been investigated.A new delayed Hamiltonian formulation has been proposed for the uncertain robotic systems under consideration.Based on the obtained delayed Hamiltonian formulation,the stabilization problem has been investigated by using Lyapunov-Krasovskii technique.The output feedback control law,by which the asymptotic stability of the obtained time delay Hamiltonian system is guaranteed,is determined by LMI constraints.Simulation has shown the effectiveness of the controller in handling time delays and unknown parameters in delayed robot manipulator.In the future work,the stabilization and trajectory tracking control problems will be considered for the general robotic systems and teleoperation systems under input/output delays.In this topic,the crucial difficulty may lie in the realization of the suitable delayed Hamiltonian formulation of the system under consideration.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Polyhedral Feasible Set Computation of MPC-Based Optimal Control Problems
- The Power Allocation Game on A Network:A Paradox
- Finite Frequency Fuzzy H∞Control for Uncertain Active Suspension Systems With Sensor Failure
- Analysis of the Caratheodory’s Theorem on Dynamical System Trajectories Under Numerical Uncertainty
- Modified Cuckoo Search Algorithm to Solve Economic Power Dispatch Optimization Problems
- Robust Leader-Following Output Regulation of Uncertain Multi-Agent Systems With Time-Varying Delay