基于多传感器耦合的客船应急疏散系统研究
2018-07-31马全党谭恒涛
马全党,刘 森,苏 昂,谭恒涛,谢 娜
(武汉理工大学 航运学院,武汉430063)
客船旅游业是一个拥有着巨大发展潜力的新兴产业,市场占有量逐年递增,远高于国际旅游业的整体发展水平。但近年来,由于客船事故频发[1],给行业的发展带来了巨大的阻碍作用。2014年4月16日,韩国“岁月号”客轮沉没,由于船上工作人员的错误引导,船上乘客未能及时逃生,造成了294人死亡、172人受伤的严重后果,在国际社会上造成了巨大的消极影响。
经过对近几年多起水上交通事故的调研发现,现场秩序、人员心理和外界引导是应急疏散的关键因素[2]。现阶段能否面对突发情况给予乘客正确的疏散引导,防止二次事故的发生,提高应急疏散效率,成为提高客船安全性与应急能力重要问题。
1 客船应急疏散系统研究
近年来,国内外学者均对疏散装置进行了相关研究,主要有光闪烁系统、动态指示系统和消防疏散系统[3]。目前,动态疏散作为研究热点被广泛研究,但现有的疏散装置无法做到实质上的动态指引,其响应速度和适用性尚待提升。几种疏散装置的特点及其优缺点见表1。
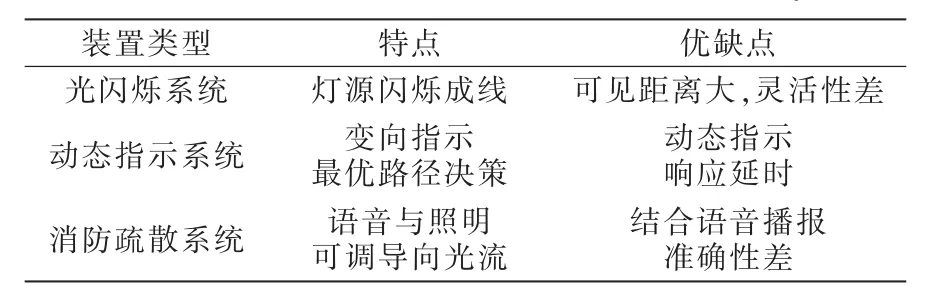
表1 疏散装置方法及比较Tab.1 Evacuation devices methods and comparison
文中基于客船应急疏散的研究现状,针对客船应对突发情况应急能力不足,难以保证船上人员疏散秩序和效率的现状,设计了一种基于多传感器耦合的客船应急疏散系统。信息采集模块通过惯性传感器、摄像头实时监测船体空间姿态和通道内部通行状态,并连接消防系统监测通道内烟、火态势;改进当量长度描述疏散通道通行难度,拟合客船疏散网络结构特点设计应急疏散单元,基于图论思想对客船疏散网络进行模块化分区,针对局部节点进行实时疏散引导。系统的具体工作原理如图1所示。
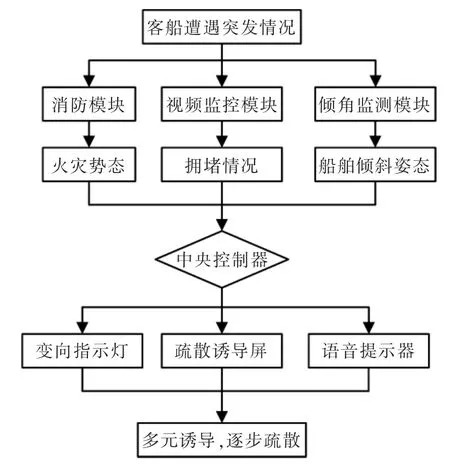
图1 系统工作原理Fig.1 System working principle
在此基础上,选取典型客船作为实验船舶,构建疏散网络简化模型,进行模块化分区,设置船舶姿态参数与通道障碍因素,基于Visual Studio开发平台进行系统效果仿真试验,以验证系统的稳定性与实际疏散效果。
2 疏散通道通行状态监测
2.1 多传感器耦合的疏散通道信息监测
文中将船上的消防系统与视频监控模块、船舶倾斜角度监测模块有机结合,综合检测多种影响因素,实时监测疏散通道信息。
2.1.1 消防联合火势监测
船舶发生火灾事故时,易产生大量的有毒有害气体,不仅降低疏散通道能见度,还严重威胁船上人员的生命安全。因此,船舶火灾监测是保障后续火灾处理及疏散人群的关键,实时监测火灾势态信息在引导乘客疏散的过程中具有重要意义。事故发生时,船上消防系统通过感烟火灾探测器 (型号HIS07)、感温火灾探测器(型号SHT10)以及感光火灾探测器 (型号TSL2561)监测不同位置处的光强度、烟雾和温度等信息,通过A/D转换器将采集到的模拟信号转化为数字信号,并传送到中央控制器进行处理。
2.1.2 船体姿态感知与监测
针对船舶姿态检测,文中采用具有斜角传感器与陀螺仪的GY9250-MPU9250姿态传感器捕捉船体倾斜姿态,并实时输入至单片机处理器,为判断疏散通道的通行难度提供数据支持。为了保证判断的精准性,在艏、舯、艉3个区域的中线面上分别安装1个姿态传感器,且船体倾角通过2个传感器综合分析得出。根据实际应用要求,尽可能采取2种传感器的优点,将载体的运动速度作为判别依据,以更好地实现数据融合。
当测量系统单独运行时,为了给预测模型数据提供一定的数据支撑,系统将通过采集传感器的数据直接进行误差补偿,以输出姿态角度。船体因碰撞挤压而变形所导致安装的传感器位置扭曲、安装位置松动、被人员或货物碰触等情况下,船舶没有倾斜但个别传感器却捕捉到倾角,错误判断船舶姿态。采用多个传感器互相配合工作,就可以有效地避免这一误判。姿态传感器工作原理如图2所示。

图2 姿态传感器工作原理Fig.2 Attitude sensor working principle
2.1.3 通行状态监控反馈
通过在通道和交通节点等处布置一定数量的红外摄像头,可实时监测通道内的通行状态。文中采用“背景前景差分法”对监控中出现的运动物体进行监测,即在监控视频中的相邻两帧画面,通过比较画面中对应区域,对明显差异部分进行数量识别和位置标注,并作为视频中检测得到的运动物体。同时,考虑到船上的主要运动监控对象是乘客人群,故有必要在识别算法中标注一定的相对轮廓面积,以进一步提高识别的准确性。
文中还采用经人工标注的样本训练过的神经网络算法,利用监控对象的区域特征和监控对象的实际个数之间的对应关系,对监控对象种类和数量进行较为准确的计算机自动识别,从而计算得出该处的人群密度,实时监测通道内通行状态,进行信息反馈修正。
2.2 改进当量长度模型
由于客船工作环境特殊,影响因素较多,文中典型的通行障碍因素包括船体倾斜、人群拥堵及火灾。
当客船船体倾斜时,倾斜角度的大小往往会影响人群的移动速度[4],具体如下:
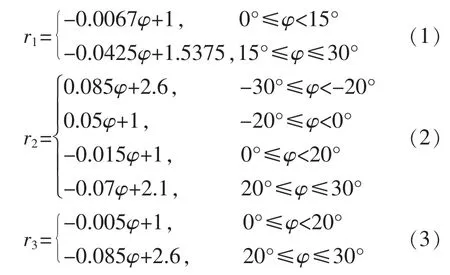
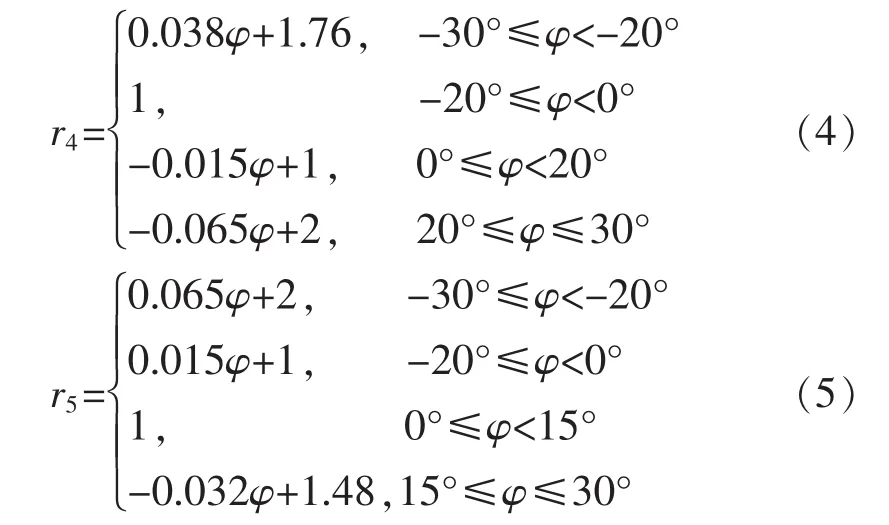
当通道内人群密度到达一定程度时,极易发生拥堵、停滞,使人群移动速度下降[4],其函数表达为
v=-0.052μ3+0.396μ2-1.074μ+1.311 (6)式中:μ为通道内人群密度,基于红外摄像头捕捉。
减光系数对人员速度的影响系数[5]为
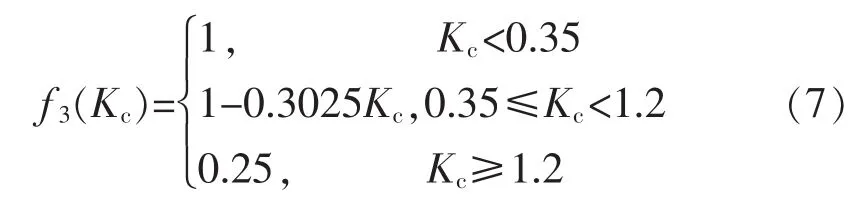
式中:Kc为减光系数,1/m。
CO对人员速度的影响系数[6]为
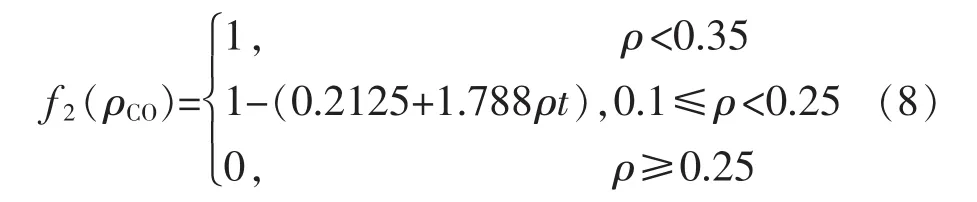
式中:ρCO为CO的体积分数,%;t为人接触CO的时间。f2(ρCO)=0时表示人员出现生命危险,通道禁行。
文献[7]认为烟气温度对人员速度的影响系数为
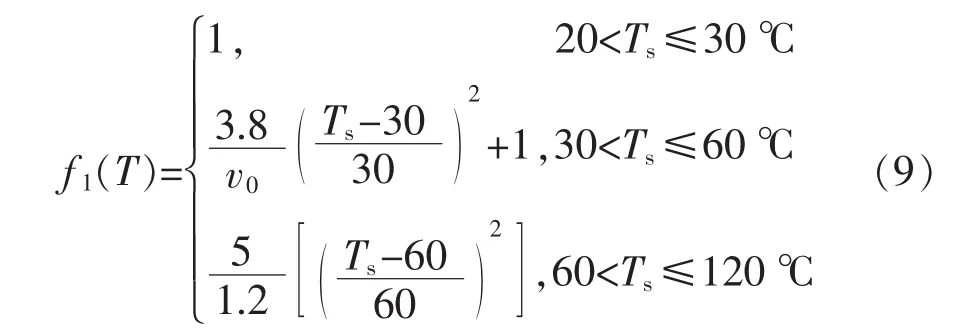
式中:Ts为火场温度;v0为初始移动速度。
采用改进的当量长度来描述通道通行难度的大小,具体为

式中:Li为任一通道当量长度;Lij为任一通道实际长度。
3 模块化疏散指示
3.1 模块化疏散引导
结合图论思想,将客船的疏散网络简化成通道结构图,同时以通道节点为基本单元将客船通道结构图进行模块化分区,将整个船舶的疏散网络分割为相接的模块,引入当量长度描述通道通行难度大小,实时监测节点处通道状态进行分级显示并指示当前推荐路线,对船上各区域人员实行分区逐步疏散引导。
在人员应急疏过程中,当人员到达任一节点时,系统由信息采集模块评估节点附近的火灾态势、拥挤程度和船舶姿态等因素对通道安全的影响,分别计算整合该节点处各通道当量长度,并指示推荐方向;当人员到达下一节点时,重复此程序;以此类推,人员每到一节点,系统将基于实际情况进行指示,直至疏散人员到达安全区域。具体疏散流程如图3所示。

图3 疏散流程Fig.3 Evacuation flow chart
为避免各模块独立工作、缺乏沟通从而导致提供的最优路径局部安全而整体危险,系统设计了中央控制器,以进行整体调控,且系统在节点处的通道选择过程中必须遵循以下2个原则:
避险原则避开前方有危险因素无法通行的通道;
最优原则选择当前满足避险原则的当量长度最小的通道。
以典型客船为例,将客船通道结构简化为图4模型(可以拓展到任意数量的房间和通道),模拟船上人员紧急疏散流程。当客船遭遇突发情况需要进行应急疏散时,船上人员陆续从房间内进入通道,到达推荐最近节点。以(3.1)为例,可在疏散装置的引导下到达下一节点 (3.3),该点有3条通道可选择,分别通往节点(3.2),(3.4),(3.5)。 其中,至(3.2)存在危险因素,至(3.4)及(3.5)通道安全,但(3.5)通往下一个唯一节点(3.7)存在危险因素,则当前推荐路线指向(3.4);以此类推,直到人员到达救生艇所在点。
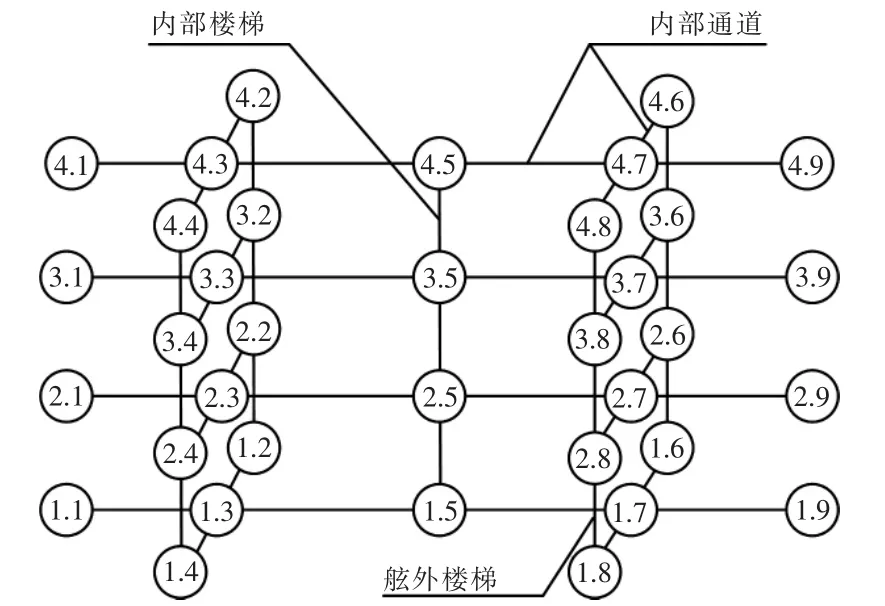
图4 客船结构简化模型Fig.4 Simplified model of passenger ship structure
3.2 多元分级指示
基于以上研究,文中提出了一种智能疏散单元,该单元由疏散诱导屏、语音播报器和变向指示灯联动构建而成(如图5所示),布设于船内交通节点并辐射周围几个通道,与逃生路径中的节点对应,显示各通道内的通行状态并在各节点指示出推荐路线。
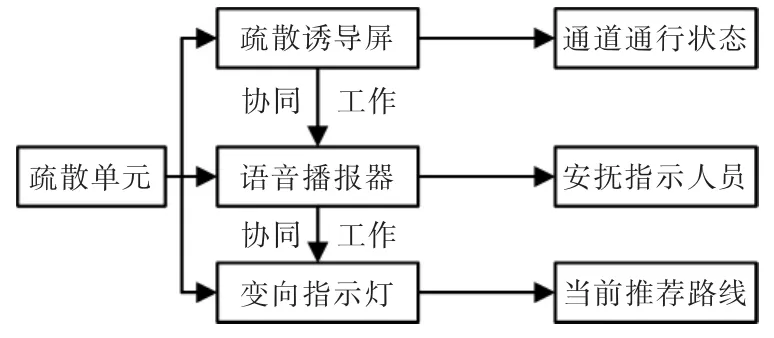
图5 疏散单元工作原理Fig.5 Working principle of evacuation unit
疏散诱导屏为LED显示屏,用于显示疏散通道的实时路况,布设在各节点通道路口,面向不同方向的4个显示屏可全方位地向乘客指示逃生路径。LED点阵指示灯可排列成绿、黄、红等3种图标:绿色图标指示安全通畅的通道;黄色图标指示有阻碍因素或拥堵的通道;红色图标指示无法通行的通道。该疏散诱导屏可实时显示该节点区域内通道的通行情况,有效安抚人员的恐慌心理,保证人群的疏散秩序和效率。
变向指示灯由处理器、路由器、指示灯、应急电源组成。路由器接收各通道实时信息,处理器控制指示灯的箭头指向及分级指示屏的显示。当危险情况发生时,变向指示灯根据实时接收到的信息变换箭头,指向安全通道,与疏散诱导屏有机联动。
语音播报器安装在疏散诱导屏、变向指示灯和通道高处,可在危急时刻提示乘客最优路径,在安抚人群恐慌心理的同时为无法获取视觉指示信息的乘客提供引导。
在人群紧急逃生的情况下,疏散诱导屏实时显示通道内的通行情况,变向指示灯以箭头的形式指向系统判定的最佳逃生方向,两者相互配合,合理分配疏散通道,再结合语音播报器的协同工作,为船上人员实时提供安全可靠的逃生途径,最大化提高逃生效率。各部分装置布设如图6所示。

图6 疏散单元装置的布设Fig.6 Evacuation unit device layout
4 系统效果仿真验证
选取一艘典型中型客船作为实验船型。基于该船具体参数,简化船上疏散网络,建立点—线路径模型,模拟设置一小倾角,并在通道上布设若干障碍因素,进行仿真试验分析。
采用Visual Studio对系统的疏散逃生效果进行分析,选择实验船舶第3层为典型案例对该层人员分布和移动进行网格化建模分析。所选用实验船舶的具体参数如下:
上层建筑长79 m,宽15.5 m;横向走廊宽1.5 m,纵向走廊宽1.5 m,中厅为12 m×16 m,在通道中设置若干危险因素与障碍因素;设置各房间为4 m×7 m,三等舱每个房间4人,二等舱每个房间3人,人员所占网格面积为0.5 m×0.5 m。人员的移动均视为横向—纵向移动,移动过程中所占网格不重叠。初始状态如图7所示。
基于仿真结果及过程的分析,优化算法结构并调整系统参数,最终仿真疏散过程如图8所示。

图7 仿真初始状态Fig.7 Simulation initial state

图8 各区域人数变化趋势Fig.8 Trends in the number of people in each region
疏散开始8.8~32.2 s,房间内人员分批依次跑出,进入横向—纵向通道;在约37.6 s,横向通道出现明显人群拥堵滞留,进入纵向通道的人明显减小,系统自动进行局部引导和资源调控,约77.2 s人群拥堵得到了较好的疏通引导,后续人员疏散逐渐趋于平缓,人群整体的疏散过程稳定有序的进行;452.7 s时,左侧人员全部疏散完毕,约461.6 s时右侧人员全部疏散,随即排队准备登艇。最终疏散效果如图9所示。
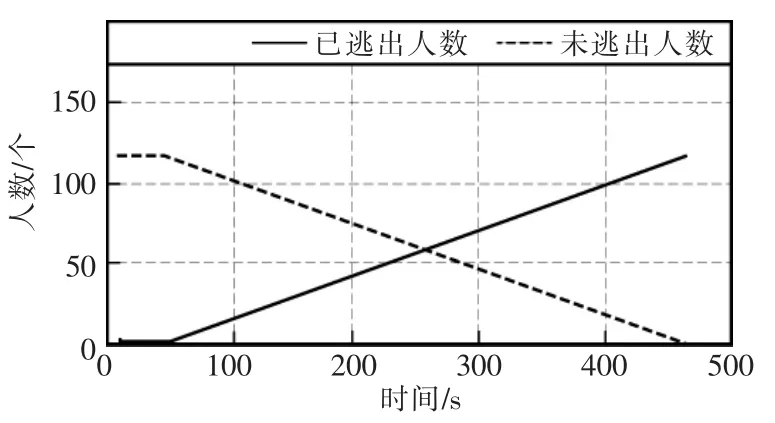
图9 逃生人数变化趋势Fig.9 Trends in the number of escape students
从仿真试验开始到人员全部疏散完毕,共用时461.6 s,考虑到船上人员的个体差异及相互之间的影响,取25%的时间富余量,即船上人员疏散过程所需时间为576.25 s。此外,再加上系统的反应以及启动的时间2 min和救生艇释放所需时间8 min,从检测到事故发生,到该层人员全部疏散撤离至安全范围共需20 min,与现阶段的研究成果及演习疏散的效率相比(见表2),明显提高了客船人员应急疏散的效率。
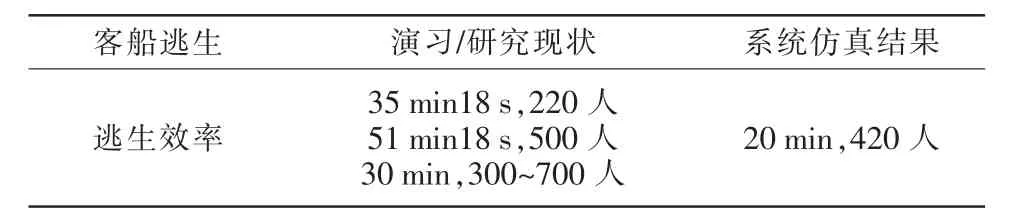
表2 系统仿真疏散效果对比Tab.2 Comparison of system simulation evacuation effect
5 结语
利用多传感器信息耦合和视频监控反馈技术实时监测疏散通道的通行状态,基于图论思想简化客船疏散网络并进行模块化处理,改进当量长度模型优化节点路径评估选择,对船上人员进行实时动态疏散引导。在Visual Studio开发平台上搭建仿真模型进行疏散模拟试验,试验结果证明该系统可有效保证船上人员疏散秩序并进行局部疏散资源调控,可以显著提高客船人员应急疏散效率并防止二次事故的发生,有力地保障船上人员的生命安全。针对客船应急疏散所提出的全新模块化疏散理念,对于提高客船应急能力和安全性具有重要的参考意义。所设计的系统可有效消除客船事故带给民众的心理阴影,提高业界与相关人员的安全意识,促进客船旅游业的健康发展。
