双LCCL谐振网络补偿无人机无线充电系统
2018-07-31钟文琦
钟文琦 ,付 宇 ,王 荣
(1.中国民航大学 电子信息与自动化学院,天津 300300;2.中国民航大学 航空工程学院,天津 300300)
近年来,无人机以其成本低廉、效费比高、生存能力强、机动性能好、使用方便等优点在民用领域得到越来越广阔的应用。尤其是,无人机因其不断地发展完善,在地图测绘、地质勘测、灾害监测、气象探测、空中交通管制、边境巡逻监控、通信中继、农药喷洒等领域起着极其重要的作用。然而,作为无人机的动力之源,其电池续航能力一直是业界亟待解决的问题[1],也是森林防火、牧区、交通、灾情侦察监视等领域困扰的主要难题之一,续航时间已经成为无人机行业的短板。
受数理模型发展的限制,以往对无人机充电的研究更多地集中在静态充电模[2],而忽略了无线自主动态充电问题。在此开发了基于磁耦合谐振原理的无人机无线充电技术。该技术克服了双LCL结构传输功率偏小的弱点[3],创新性地引入双LCCL谐振补偿结构,实现了原边电缆的电流恒定控制以及副边输出电压恒定控制。该技术的特点还在于能够动态检测自身锂电池电量,若低于设定阈值,无人机通过北斗定位以及图像处理使无人机精确定位到标志物充电台,并通过无线充电单向传输系统进行续航充电。与传统插座式传输相比,其灵活性强,完全省去了人工充电操作并且不需要精确对位充电,从而提高了无人机的续航能力。
1 双LCCL谐振无线充电原理
文中设计的无线充电系统采用双LCCL谐振网络补偿充电结构。其中,发射线圈镶嵌于充电平台,接收线圈固定在无人机起落架内,通过磁耦合谐振将发射端的电能传输给接收端对锂电池充电。其磁耦合谐振网络补偿原理是,在发射端与接收端配置谐振频率相同的线圈,在一定距离范围内,发射端输入与线圈谐振频率相同的信号,发射端与接收端产生谐振,能量从发射端传输给接收端,从而实现2个电路模块之间电能的无线传输[4-5]。双LCCL补偿无人机无线充电系统原理如图1所示。
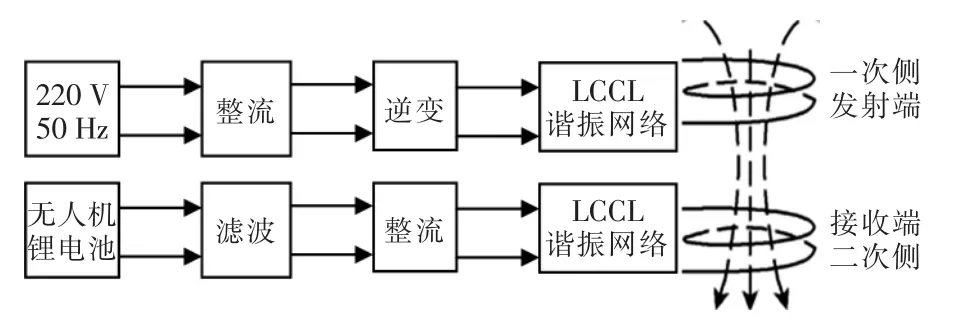
图1 双LCCL补偿无人机无线充电系统原理Fig.1 Double-sided LCCL resonant compensation network for UAV wireless power transfer principle
图1中,谐振网络输入信号由220 V,50 Hz交流电经过整流和逆变提供高频交流信号;接收端经过整流和滤波给恒流恒压充电模块供电。基于双LCCL谐振补偿的无人机WPT系统拓扑结构如图2所示。
图 2 中,Lp,C1,C1s,L1构成发射端 LCCL 谐振补偿电路;Ls,C2,C2s,L2构成接收端 LCCL 谐振补偿电路;M为发射端与接收端互感。在谐振网络[6-8]的基础之上,设计了双LCCL谐振网络即在发射线圈支路上额外串入电容,通过合理选择串入的电容值来调整发射线圈上的电流,同时隔离电源侧的直流分量,避免传输线圈的直流磁化。逆变器H桥臂软开关工作模态与双LCCL谐振输入电压波形如图3所示。
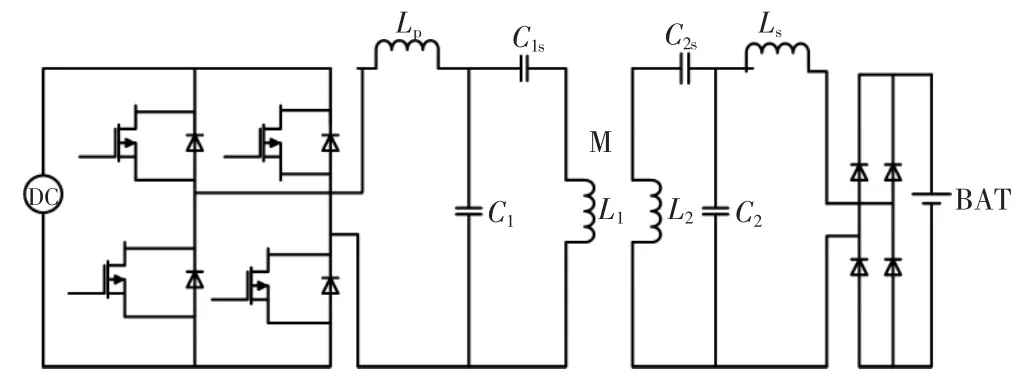
图2 基于双LCCL谐振的无人机WPT系统拓扑结构Fig.2 Basedondouble-disedLCCLresonantcompensation network for UAV wireless power transfer topology
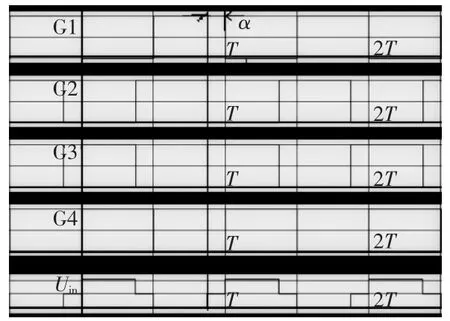
图3 逆变器H桥臂软开关工作模态与输入电压波形Fig.3 Working mode and input voltage waveform of inverter H bridge arm soft switching
图3中,逆变电路采用全控型H桥移相控制,使得谐振网络输入电压和电流零相位角,移相调制来减小线圈损耗。α为软开关移相角,软开关1与软开关4反相;软开关2与软开关3反相。
2 双LCCL谐振系统数学模型
通过耦合谐振原理和等效电路原理,对无人机WPT电路进行建模,同时对电路进行推导和求解。接收端拓扑结构等效电路如图4所示。
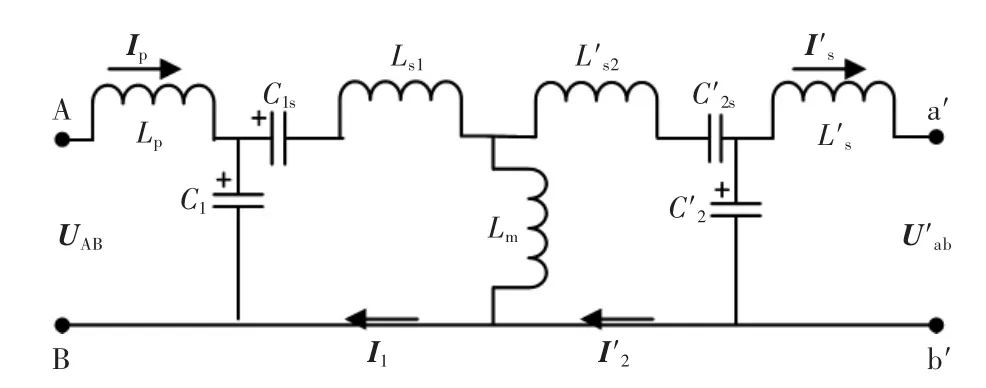
图4 接收端拓扑结构等效电路Fig.4 Equivalent circuit of receiving topology structure
根据等效电路图和谐振原理,可以得到电容C1s

同理,电容C′2s和与电感L′s2串联等效电感L′e2为

根据叠加定理,将图4所示等效电路分为只有UAB作用和只有U′ab作用的谐振频率状态等效电路。如图5和图6所示。和电感Ls1串联的等效电感Le1为
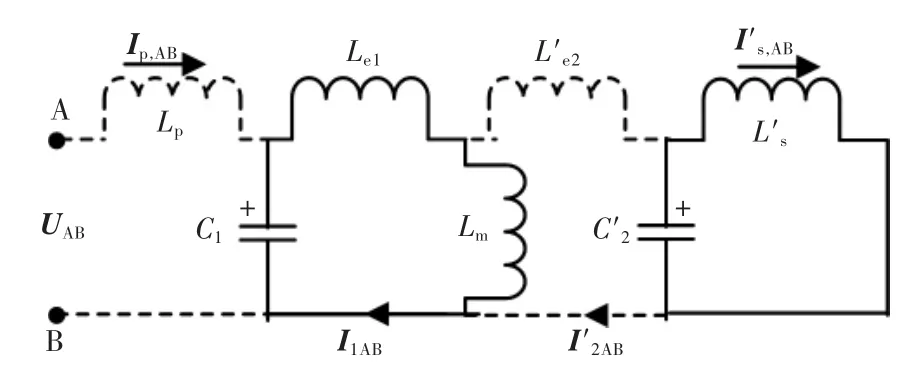
图5 只有UAB作用状态等效电路Fig.5 Only UABaction state equivalent circuit
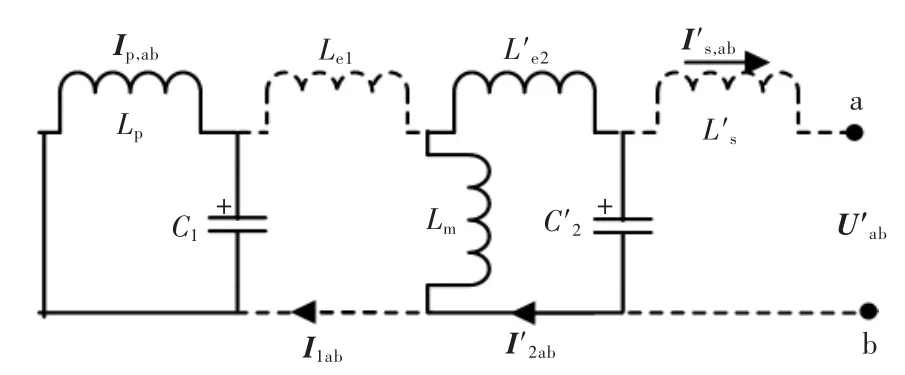
图6 只有U′ab作用状态等效电路Fig.6 Only U′abaction state equivalent circuit
如图5所示,由于电感L′s与电容C′2和电感Lp与电容C1串联谐振,故I′2AB=Ip,AB=0。 根据

式(1)和式(3),整理可得
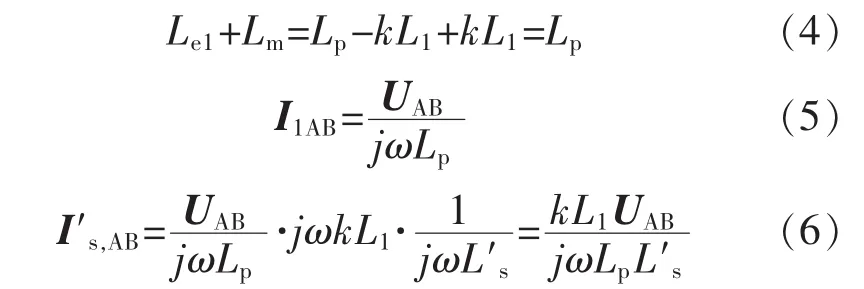
同理,可进行只有U′ab作用状态的分析与求解。若UAB参考相位为0°,由此可得
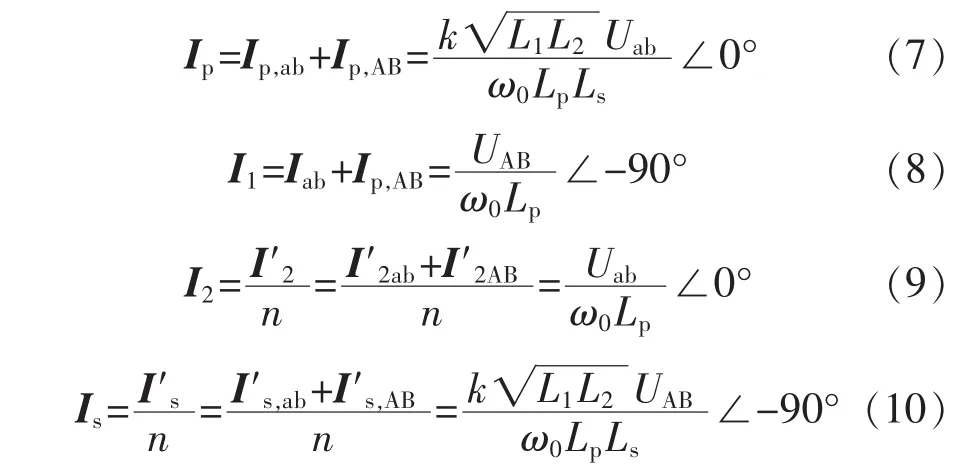
由式(7),可得输入功率

根据文献[4],可以得到输出功率

其中
所用的线圈采用扁平电感器的平面圆形螺旋线圈。通过窄带法计算接收端线圈和发射端线圈的电感值。所谓“窄带法”,是指通过假设电感器中的所有电流都集中在螺旋形导体正中央,电流在此窄小范围内流动状态下计算的电感值。
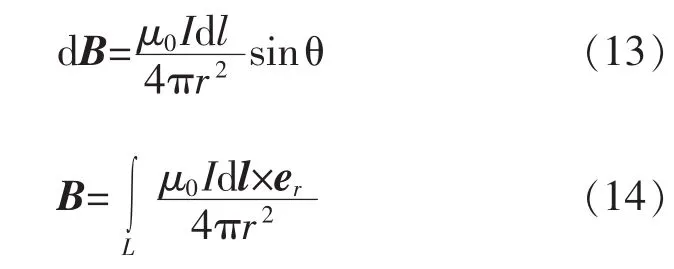
根据Biot-Savart定律,可以得到磁感应强度矢量微分和矢量积分公式为
线圈微元中磁感应强度分析如图7所示。
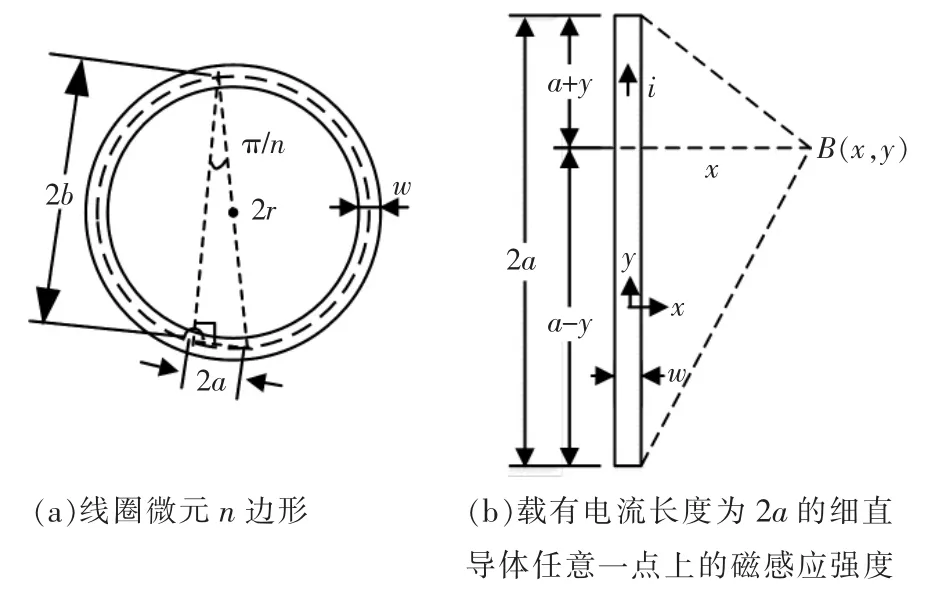
图7 线圈微元中磁感应强度分析Fig.7 Analysis of magnetic induction intensity in coil microelement
对于圆形线圈分隔成n边形。如图7(a)所示,将圆环线圈微元n边形,其中一段长度为2a,线圈导体宽度为w,其通过电流i,在2b的范围内产生的磁感应强度如图7(b)所示,不妨设:
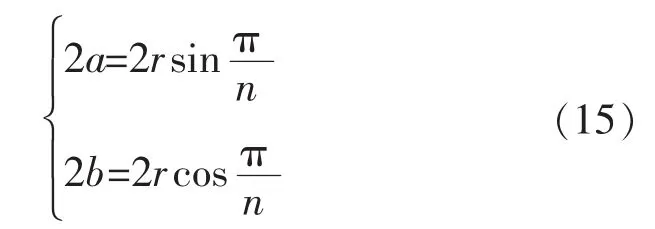
由此得出微元导体长度为2a的磁通量为
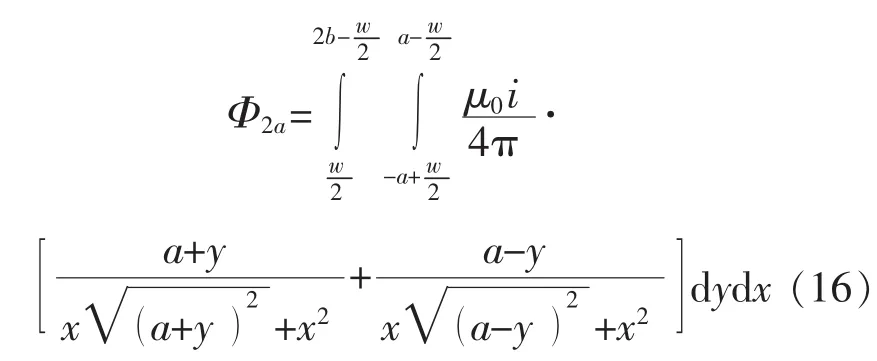
根据式(13)~式(16),推出N匝M层线圈电感理论计算值为


接收端与发射端线圈之间的间隙为h,可以得到两侧线圈之间互感值近似为

线圈电感近似为
3 双LCCL谐振电路设计
3.1 电路参数设计
设计线圈匝数18匝,5层线圈,线圈半径为12.5 cm,铜线导体宽度为0.8 mm串联绕制。电能传输过程中,软开关的开关频率等于LCCL谐振网络的谐振频率,由谐振原理及式(11)(12)可得接收端和发射端LCCL参数理论计算值为
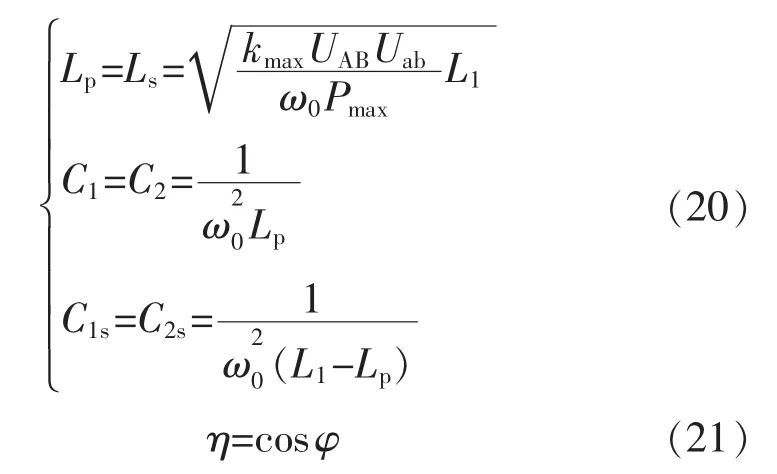
根据式(20)(21),可以得到双 LCCL 谐振网络无人机无线充电的理论参数,见表1。
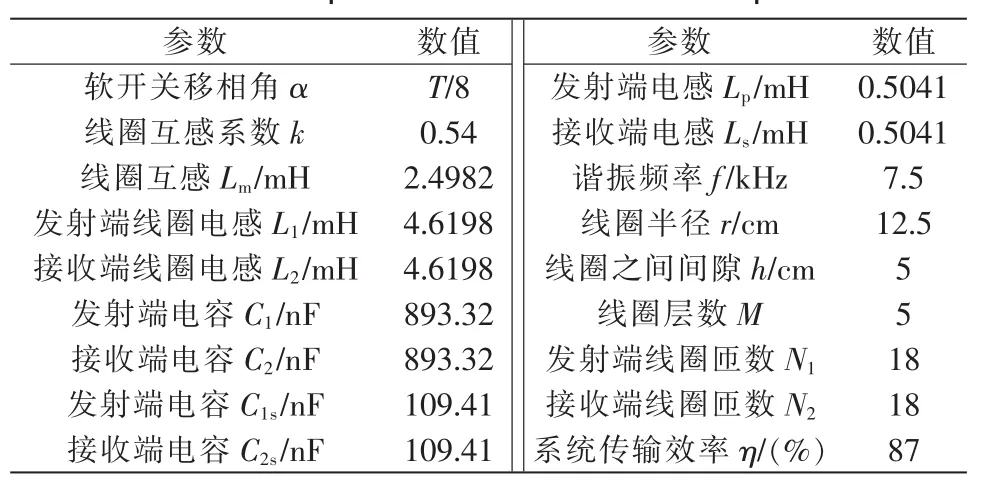
表1 双LCCL谐振网络无人机无线充电理论参数Tab.1 Double-sided LCCL resonant compensation network for UAV wireless power transfer theoretical parameters
3.2 系统电路仿真
输入表1理论数值,得到的仿真电路原理如图8所示。
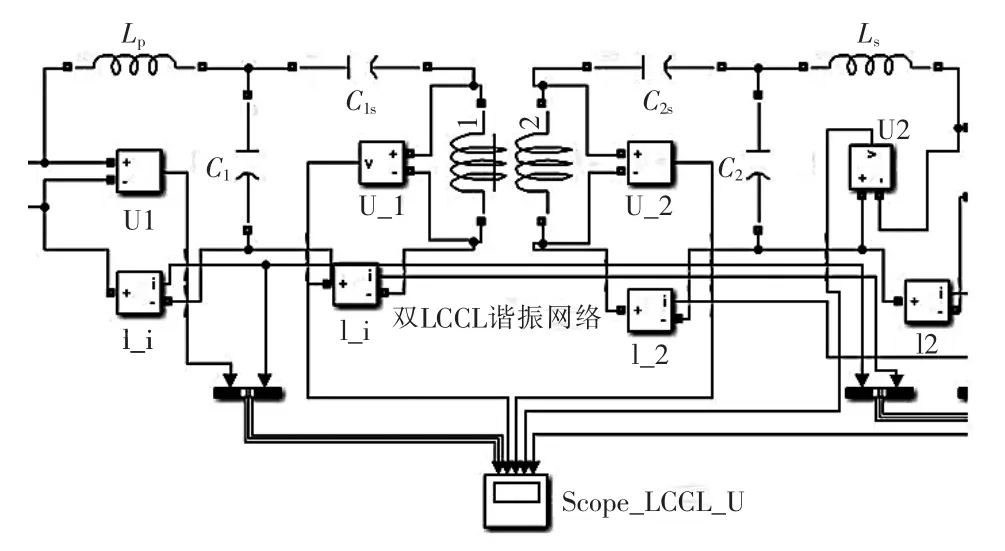
图8 无人机无线充电Simulink电路仿真Fig.8 Simulink circuit simulation for UAV wireless power transfer
使用MatLab/Simulink仿真软件,得到双LCCL的输入电压、输出电压波形和发射端线圈、接收端线圈两端的电压、电流波形,2组波形结果如图9所示。由图可见,系统传输效率的理论计算值与仿真值相近,为后续的试验验证提供了参考依据。
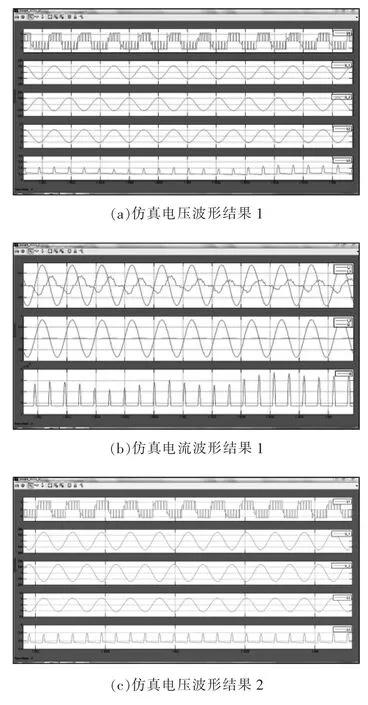
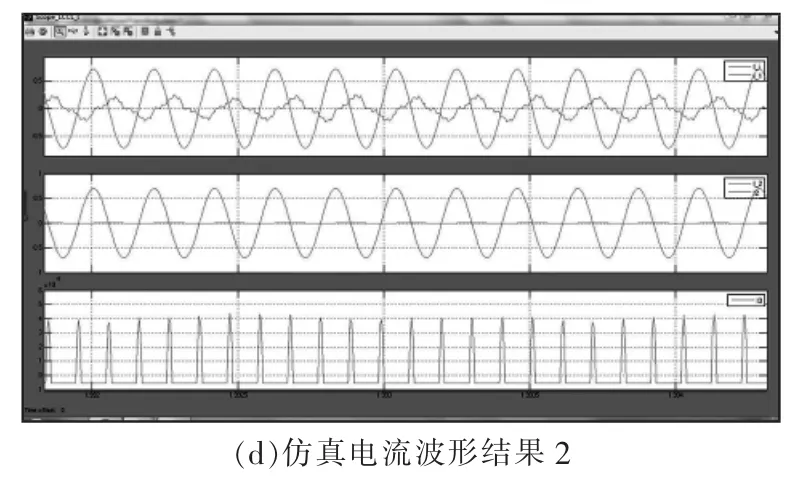
图9 无人机无线充电Simulink仿真电流、电压波形结果Fig.9 Simulink circuit simulation voltage waveform results for UAV wireless power transfer
3.3 试验结果验证
根据理论计算和仿真结果,并考虑升压模块、降压模块和恒流恒压充电模块的输入输出阻抗、容抗,调整试验参数。其中
1)电网220 V,50 Hz的电压经过整流器变成12V直流电,再经过SG3525逆变器输出为7.605kHz高频12 V交流电。
2)通过全桥大功率驱动控制模块,向发射端LCCL提供高频交流信号,接收端配置与发射端谐振频率相同的线圈,接收端接收到发射端交流信号。试验测试结果见表2,发射端与接收端电压峰峰值约为65 V,谐振频率为7.64 kHz。
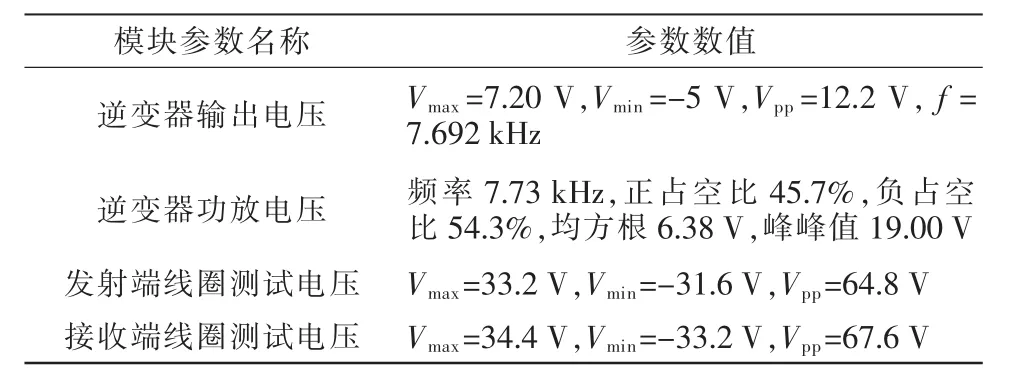
表2 逆变器和线圈测试电压值Tab.2 Inverter and coil test voltage values
3)经过UF5408超快恢复整流二极管整流后得到直流电压,电容滤波后得到一个比较稳定的直流输出电压。在接收端部分,电路经过谐振补偿网络后,整流前电压峰峰值65.20 V,频率为7.64 kHz为正弦交流电。经滤波后,电压稳定于33.90 V,纹波较小。
4)滤波信号降压后,向恒流恒压充电模块提供直流电,充电模块输出电压为12.4 V,示波器测试结果如图10所示。显示结果表明,可以有效地对12.6 V,5400 mA·h锂电池充电。
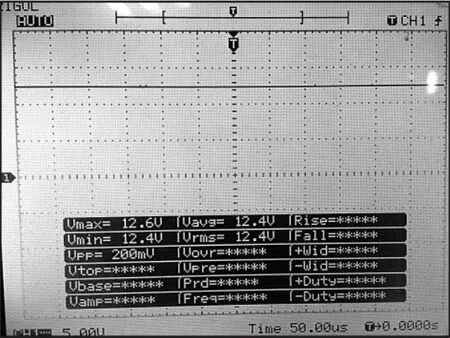
图10 示波器测试充电模块输出波形Fig.10 Output voltage of charging test
在此,采用恒流恒压充电方式,既可以避免恒压充电开始时充电电流过大的问题,又克服了恒流充电后期容易出现过充的现象。设置充电模块浮充电压为12.6 V,最大充电电流为2.5 A,对锂电池进行恒流恒压充电。实物装置结构如图11所示。
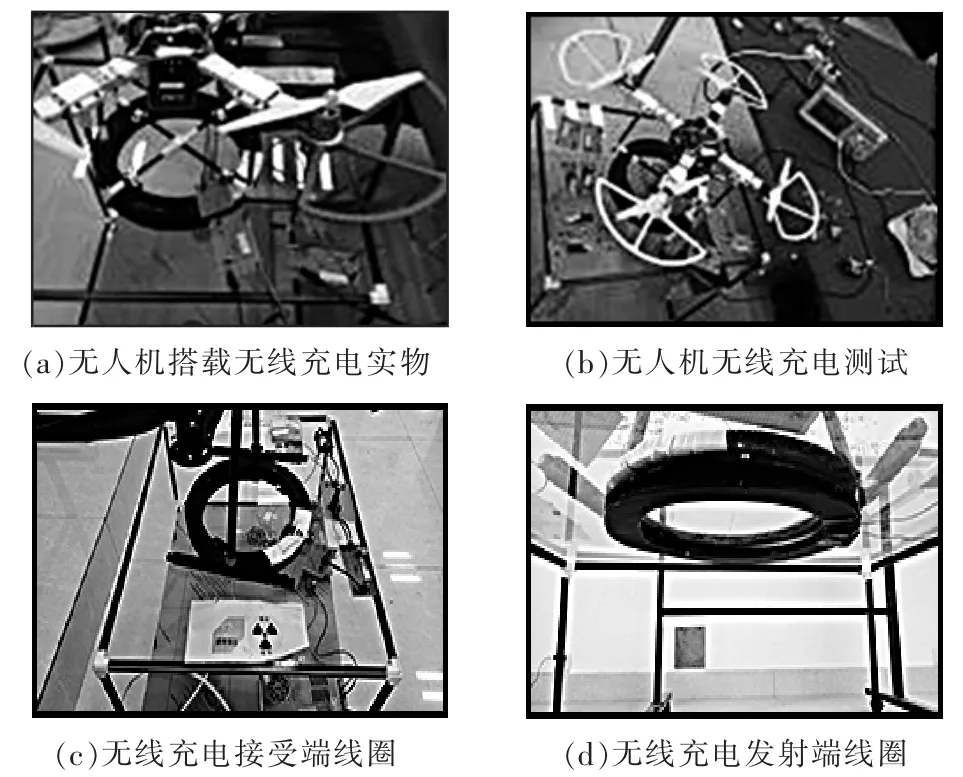
图11 无人机无线充电试验装置Fig.11 Experimental setup of UAV wireless transfer
测试结果表明:①设置充电模块浮充电压12.6 V,最大充电电流2.5 A,进行对锂电池恒流恒压充电,该充电方式克服了恒流充电后期容易出现过充的现象;②在发射线圈支路上串入电容,通过合理选择串入的电容值来调整发射线圈上的电流,同时可以隔离电源侧的直流分量,避免传输线圈的直流磁化;③发射端LCCL输入电压的改变,对系统输出功率影响较大,而锂电池充电功率最大为31.5 W,对系统消耗功率影响较小,但考虑到锂电池充电安全电压和对无人机电磁干扰,输入电压提高对系统作用不大。充电时两线圈在5 cm范围内能保证稳定功率输出,充电效率可达到83%以上。
4 结语
首先对双LCCL谐振网络补偿无人机无线充电系统建模,进行理论计算分析,再通过Simulink电路仿真验证理论计算设计参数,最后进行了试验测试。与插座式静态传输相比,所提出的系统模型灵活性强,不需要精确对位充电,无需人工操作,充电效率达到83%以上,大大提高了无人机的工作效率。
