机动车尾气遥感检测系统高低温试验分析
2018-07-31魏树龙张笑平陈文亮
甄 杨 ,魏树龙 ,张笑平 ,陈文亮 ,汪 锋
(1.天津市计量监督检测科学研究院,天津 300192;2.天津同阳科技发展有限公司,天津 300384)
据我国环境保护部发布的《中国机动车环境管理年报(2017)》显示,我国已连续8年成为世界机动车产销第一大国,机动车所产生的污染已成为我国空气污染的重要来源,是造成空气中细颗粒物、光化学烟雾污染的重要原因。因此机动车污染的防治已显得愈发紧迫。
随着我国机动车保有量的快速增加,部分城市的空气已经开始呈现出煤烟和机动车尾气复合污染的特点,直接影响人民群众的健康。据北京、天津、上海等15个城市大气细颗粒物(PM 2.5)源解析工作结果显示,本地排放源中移动源对细颗粒物浓度的贡献范围为13.5%~41.0%,在极端空气扩散不利的情况下,贡献率甚至会达到50%以上[1]。
随着我国对机动车尾气排放标准不断提高,有效发现并治理道路上的高排放车辆,降低机动车尾气对环境空气造成的污染,改善城市空气质量显得尤为重要。目前,我国控制机动车尾气排放污染的主要措施为机动车的年检、日常的路检等。但由于我国对非运营机动车年检周期放宽至6年,且机动车在日常道路行驶时,车辆的载重负荷、保养维护、驾驶习惯等因素均会对其尾气排放产生较大影响。虽然我国目前已初步建立了机动车环境管理体系,但是距离国务院关于蓝天白云成为“新常态”的要求还远远不够,如何提高机动车的尾气排放标准,如何加强对机动车尾气排放的管控,成为当下亟待解决的问题。
1 机动车尾气遥感检测技术
机动车尾气遥感检测是专门针对城市中的主要道路设计的全天候在线遥感检测技术。作为一种新型的实时在线检测技术,它具有较高的准确度,能够客观实时地给出机动车尾气的排放信息,具有不影响车辆正常行驶、防止检测舞弊、自动化程度高等优点。
该技术的检测原理是基于气体的受激吸收。当一束激光穿过被测的气体时,激光器波长频率与被测气体的某个吸收谱线中心频率相同时,被测气体的分子(原子)会吸收光子从而跃迁到高能级,该跃迁过程反应出来即是激光能量的衰减。激光能量衰减可以由朗伯-比尔定律(Lambert-Beer law)表示,如图1所示。
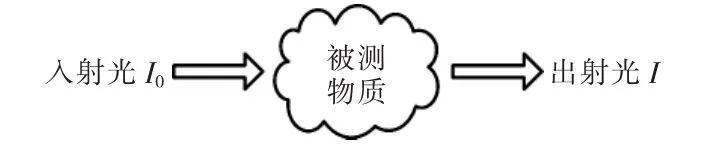
图1 物质吸光过程Fig.1 Material absorption process
根据Lambert-Beer定律[2-5],对于单一频率的激光,通过气体吸收后其光强变为

式中:Iλ为出射光强度;I0(λ)为入射光强度;R为反射率;n为反射次数;S0为分子在吸收峰λ0处的吸收线强;g(λ-λ0)为分子在波长 λ 处的吸收线性函数,与温度和压力有关;c为分子数浓度;L为光程长。因此,当已知入射光光强、出射光光强以及光程长等信息时,就可得出被测气体的浓度数值。
由天津同阳科技发展有限公司研制的TY-CGT-22型移动式机动车遥感检测系统,适合用于移动检测以及单车道固定检测。该系统由遥感检测单元、车辆识别单元、实时监控单元、气象单元、控制软件平台、LED显示单元、机动车尾气检测平台中心端等组成,如图2所示。
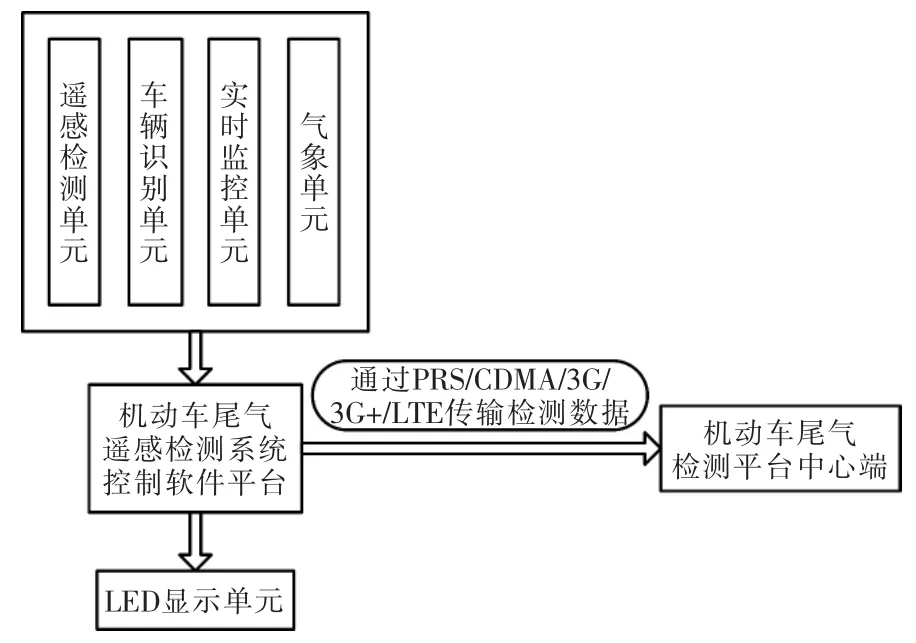
图2 机动车尾气遥感检测系统构架Fig.2 Frame of vehicle exhaust remote sensing detection system
在测量现场(如图3所示),机动车尾气遥感检测单元检测通过车辆的尾气信息,机动车识别单元记录车辆的行驶状态并收集车辆的车牌信息,气象单元收集车辆经过时的环境信息,以便进行更准确的测量和分析,实时监控单元对设备运行状态进行实时监控,控制软件平台将各单元采集的数据进行分析统计,实时显示各单元的检测结果。
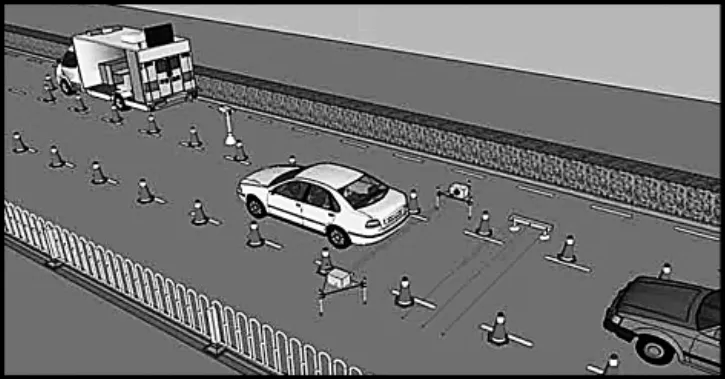
图3 机动车尾气遥感检测系统效果图Fig.3 Effect map of vehicle exhaust remote sensing detection system
该系统可以实现在1 s内准确地测量出车辆排放的氮氧化物NOx,碳氢化合物HC,一氧化碳CO,二氧化碳CO2等浓度以及尾气的烟度,同时可捕获汽车的车牌信息、车型、车体颜色、速度、加速度、汽车VSP等信息,如图4所示;并记录当时的气象信息,结合云平台的大数据统计与处理分析功能,能够客观实时地给出机动车尾气的排放信息,具有不影响车辆正常行驶,防止检测舞弊,自动化程度高等优点。

图4 机动车尾气遥感检测软件界面Fig.4 Software interface of vehicle exhaust remote sensing detection
2 机动车遥感检测系统高低温试验
我国地域广大,同一个季节区域温度差异很大,不同的季节气温分布差异也很大,气温分布的特点是冬季气温普遍偏低,南热北冷,南北温差大,温差近50℃。因此,对机动车尾气遥感检测系统进行高低温试验研究,分析其环境性能试验能力,是十分必要的。
为了评价检测系统的在高低温条件下工作状态,试验使用天津市计量监督检测科学研究院的步入式高低温实验箱,其温度范围为-40~100℃,湿度范围为(相对湿度)20%~93%,UT=0.3℃,URH=2.0%(k=2),其中U为试验箱的扩展不确定度;k为包含因子。依据GB/T2423.1—2008《电工电子产品环境试验 第2部分:试验方法 试验A:低温》和GB/T2423.2—2008《电工电子产品环境试验 第2部分:试验方法 试验B:高温》,模拟环境温度-40~70℃的工作条件,对尾气遥感检测系统进行试验。其中,环境温度-40℃和70℃分别保持2 h,试验时间共计8 h,同时观察仪器工作状态,采集并分析遥感数据。
高低温试验如图5所示。试验系统主要由尾气遥感检测单元和系统控制软件平台组成,包括光源发射系统、模拟机动车尾气组分的光程池、光路接收系统和无线检测终端。在高低温实验箱 (如图6所示)内将试验系统以及光路搭设好,试验数据通过无线传输至高低温实验箱外的软件平台。
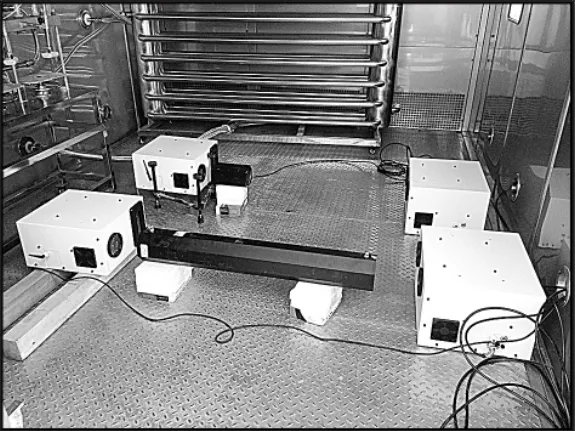
图5 高低温试验Fig.5 High and low temperature experiment
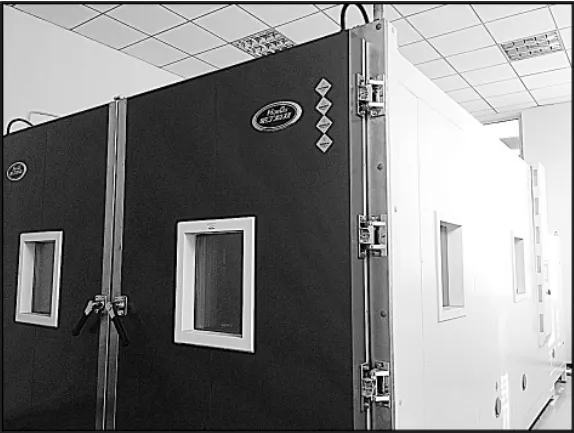
图6 步入式高低温实验箱Fig.6 Enter type high and low temperature experiment box
检测过程以NO在低温状态下的一个采样过程为例。当步入式高低温实验箱内温度降到-40℃时,采集遥感监测系统数据,共采集3个采样周期,每个采样周期以1 s为间隔采集60个实时数据,体积分数的采样数据如图7所示。然后,对每个采样周期的60个数据求平均值,3个采样周期的采样平均值分别为 1979.424×10-6,1989.003×10-6,1986.338×10-6,再求取其平均值,得出温度为-40℃时NO的体积分数为1984.548×10-6。光程池内标准气体体积分数及高低温试验所采集的体积分数见表1。
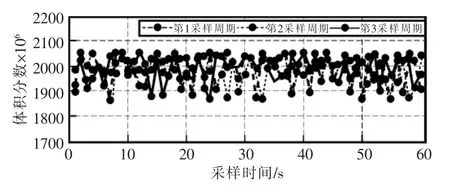
图7 NO低温试验体积分数采样数据Fig.7 Low temperature experiment volume fraction sampling data of NO
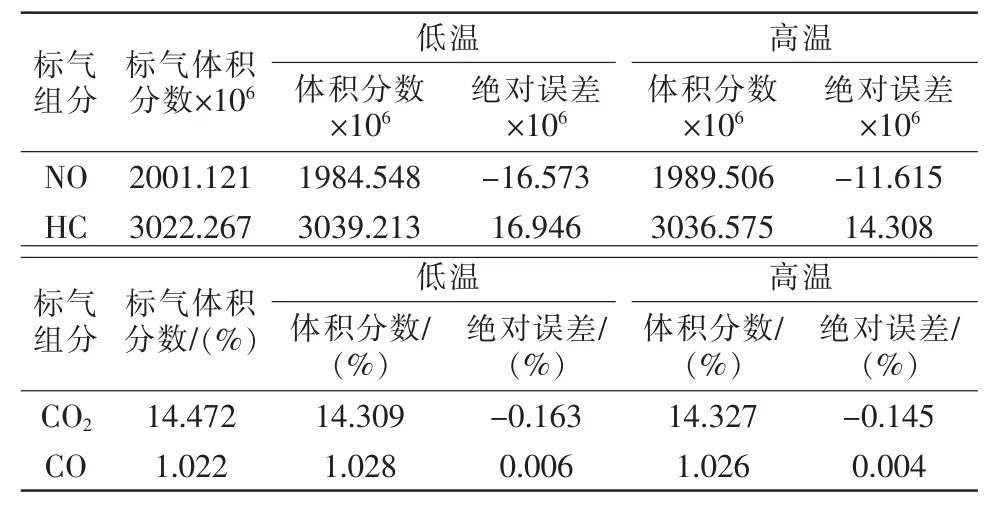
表1 高低温试验体积分数及绝对误差Tab.1 Volume fraction and absolute error of high and low temperature experiments
由表可知,CO2的高温和低温状态下的绝对误差均没有超过±0.25%,NO的高温和低温状态下的绝对误差均未超过±20×10-6,均满足HJ 845—2017《在用柴油车排气污染物测量方法及技术要求 (遥感检测法)》的要求,且在高低温试验中,机动车遥感检测设备工作正常。因此该设备的高低温试验性能符合要求。
3 结语
2017年3月,环保部、发展改革委、财政部、能源局和北京、天津、河北、河南、山东、山西等6省市联合发布了 《京津冀及周边地区2017年大气污染防治工作方案》,明确了该地区的“2+26”城市2017年的大气污染治理任务:“2+26”城市均要安装2台(套)移动式遥感监测设备、10台(套)左右固定垂直式遥感监测设备,以重点筛查柴油货车和高排放的汽油车。可以预见,随着机动车尾气遥感检测标准的发布以及遥感检测技术在全国范围内的逐步推广,该检测技术的普及使用将会为我国控制城市大气环境质量做出卓越贡献。
