三相可逆平衡电子负载装置的设计与仿真
2018-07-31王语园徐志伟
王语园 徐志伟
(1.陕西铁路工程职业技术学院 渭南 714000)(2.西安交通大学 西安 710049)
1 引言
在电力系统中,实际负载有很多类型,各种类型有着不同的特点,不同负载对电力系统的影响也各不一样。研究不同类型负载与电力系统的相互作用对电网来说具有重要意义[1~4]。但是,采用实际各种类型负载作为研究对象很不经济也不现实。设计一种可以代替实际负载的模拟装置,通过对模拟装置的研究来分析各种实际负载与电力系统的相互影响。
本文研究的三相平衡是指三相对称,即电量三相幅值相等,相位互相差120°。三相可逆电子负载模拟装置主电路结构采用双PWM变流器,控制电路使用闭环控制,输出功率的控制是通过控制逆变器输出电流的幅值和相位来实现的,从而实现供电系统与负载之间功率双向流动的模拟。
2 三相可逆平衡电子负载装置主电路
采用双PWM变流器结构的三相可逆平衡电子负载装置主电路如图1所示,可以实现功率的双向流动。

图1 三相可逆平衡电子负载装置主电路
3 三相可逆平衡电子负载装置的控制电路
三相可逆平衡电子负载装置主电路如图1所示,控制电路是其核心[2,6~9]。控制电路以功率控制为目标,达到功率双向流动的目的。三相PWM输出电流为控制参数,输出电流与输出功率的关系为

式(1)中,Pn为有功功率,Qn为无功功率,E为电网电压有效值,θn为初相位,n为u、v、w相数。
在图2中,P*,Q*为指令功率,i*作为指令电流。φ为同步角速度,由锁相环PLL可以得出。
4 PI环设计
根据式(1),控制功率的控制电路可转换为控制电流的控制电路[3]。电网电压已知,只要控制三相可逆平衡电子负载模拟装置的输出电流即可控制该负载装置的输出功率。显然,图2即以电流控制为核心建立的控制模型。
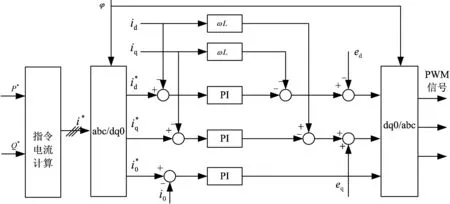
图2 三相可逆平衡电子负载装置的控制电路
控制环节核心部分是PI环,电流调节器通过id电流环来说明,已解耦的id电流环结构[4]如图3所示。
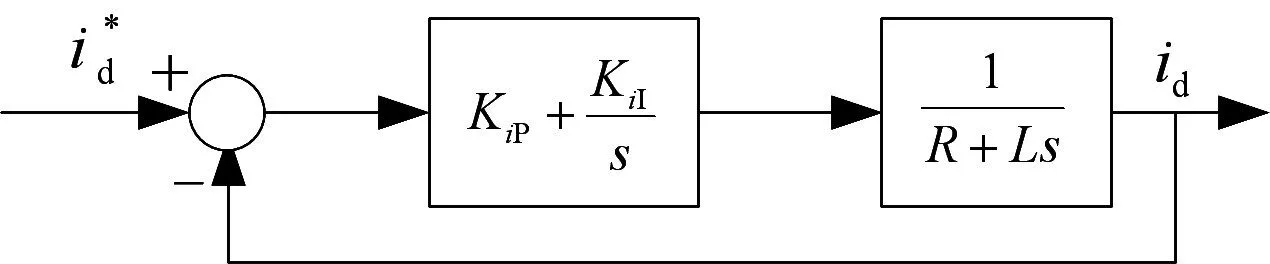
图3 电流环id的PI简化结构
其中,R为线路阻抗;L为输出滤波电感;KiP为比例常数;KiI为积分常数。
根据图3给出的简化结构写出系统开环传递函数

闭环传递函数为

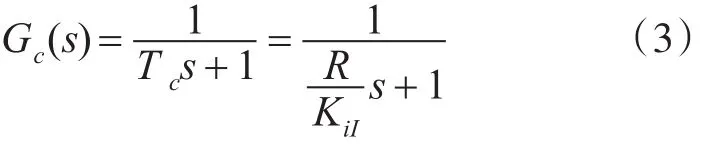
则PI参数有

5 控制电路参数的计算
5.1 三相可逆平衡负载模拟装置控制电路参数的计算
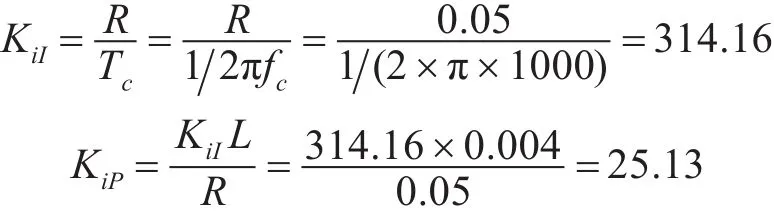
三相平衡负载模拟装置已知参数为模拟电子负载容量取6kVA,电网输出220V相电压,工频50Hz,且为三相正弦交流电。取电感参数为4mH,IGBT的开关频率为10kHz,线路阻抗R取0.05Ω,控制电路参数主要是PI参数:KiP,KiI。
对于闭环传递函数为一个含有滤波参数的系统,采用SPWM调制方式[5~6],转折频率选择为开关频率的 1/10[7~8,10~13],则系统对开关函数及其倍频附近的谐波具有明显的衰减作用[9~10]。本文开关频率为10kHz,则转折频率为 fc=1000Hz,则闭环时间常数为 Tc=1 ωc=1 2πfc。
KiP,KiI根据式(4),(5)计算可得
5.2 仿真参数
仿真参数是电路模型仿真的基础,三相可逆不平衡电子负载模拟装置的仿真参数具体如表1所示。

表1 系统仿真所需参数表
6 三相可逆平衡电子负载装置的仿真
本文运用Matlab/Simulink仿真软件进行仿真[14~16]。仿真参数如表1所示。系统仿真模型由指令电流模块、控制系统模块、电压有效值模块、主电路模块和测量模块等组成,如图4所示。指令电流计算模块是按照式(1)来搭建,控制模块如图5所示。该系统分别将指令电流ia*,ib*,ic*和实测电流ia,ib,ic以及输出电压ea,eb,ec由三相静止坐标系abc转换到三相dq0旋转坐标系,在d,q,0轴分别进行PI控制,再进行反变换从三相旋转坐标系dq0转换到三相abc静止坐标系,最后与三角波进行比较形成PWM脉冲来控制IGBT的导通与关断。
1)当t=0s时,设定指令功率为P=6kW,Q=0kvar;在t=0.085s时,P=-6kW,逆变器输出波形如图6所示。由图6可知,t=0.085s时,同相位的电压和电流波形突然改变,突变成反相位,并且有功功率跟随设定值的改变同时发生改变,但是Q值仍然为0kvar。

图4 三相平衡负载模拟装置系统仿真图
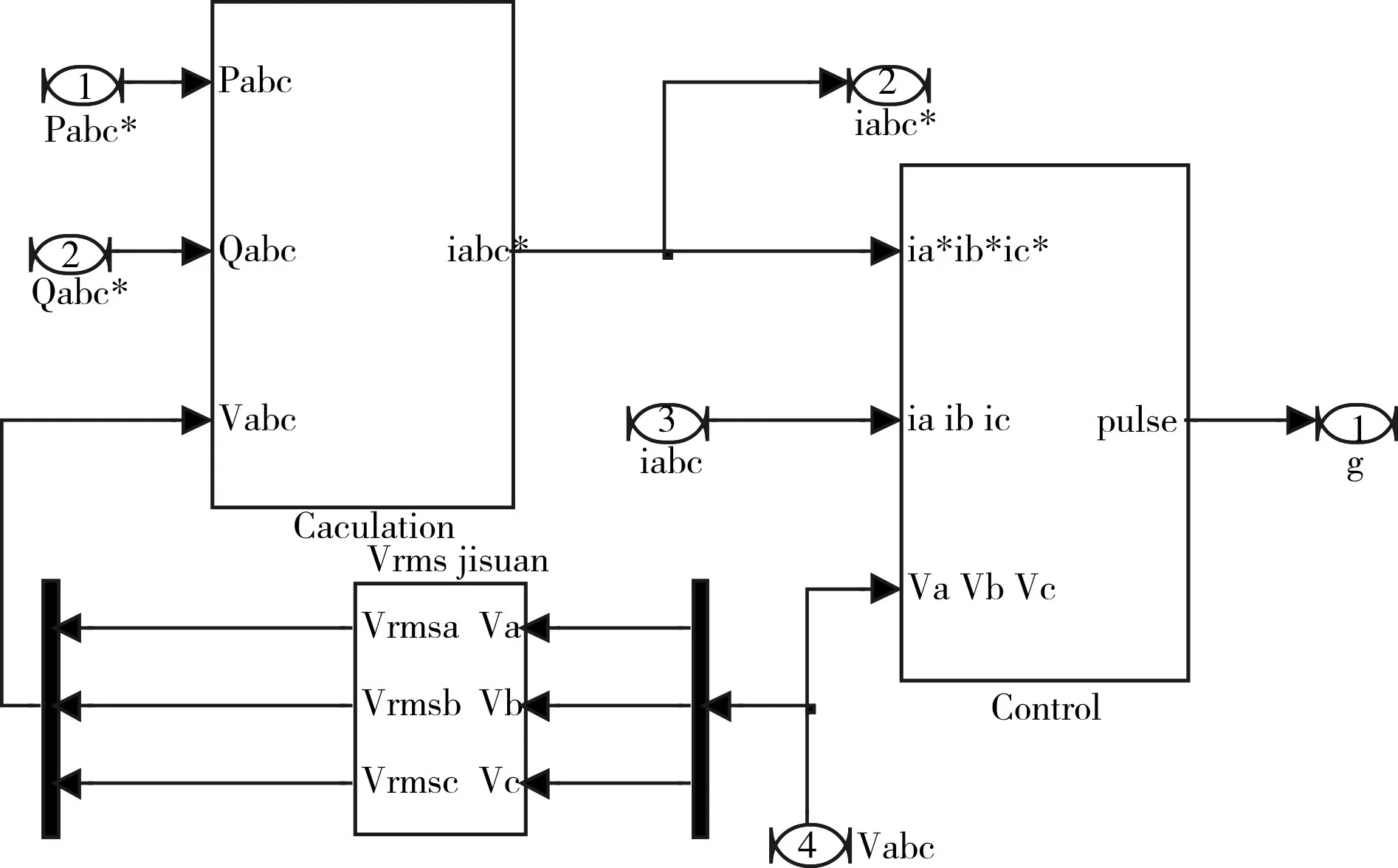
图5 三相平衡负载模拟装置控制模块

图6 有功功率给定突变时的系统响应
2)当t=0s时,设定指令功率为Q=6kvar,P=0kW;在 t=0.085s时,Q=-6kvar,逆变器输出波形如图7所示。由图7可知,在t=0.085s时,电流超前电压90°,突变为电压超前电流90◦,并且无功功率跟随设定值的变化而变化,但是P值仍然为0kW。
3)当t=0s时,设定指令功率为 P=3kW,Q=-3kvar,t=0.085s时,P=-3kW,t=0.1s时Q=2kvar,逆变器输出波形如图8所示。由图8可知,在t=0.085s时,有很短的动态过程,输出电流出现改变。在t=0.1s时,输出电流相位从超前成为滞后,大小同时也发生改变,并且P、Q由于设定值改变也跟随改变。
4)当t=0s时,设定指令功率为 P=3sin(ωt)kW,Q=0kvar,t=0.085s时,P=3sin(ωt+π)kW,逆变器输出波形如图9所示。由图9可知,在t=0.085s时,输出电流与电压的相位由同相位突然变为反相位,并且P由于设定值改变也跟随改变,但是Q值仍然为0kvar。
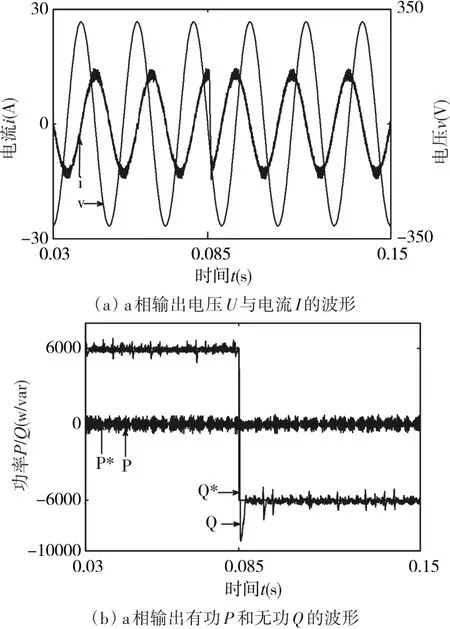
图7 无功功率给定突变时的系统响应
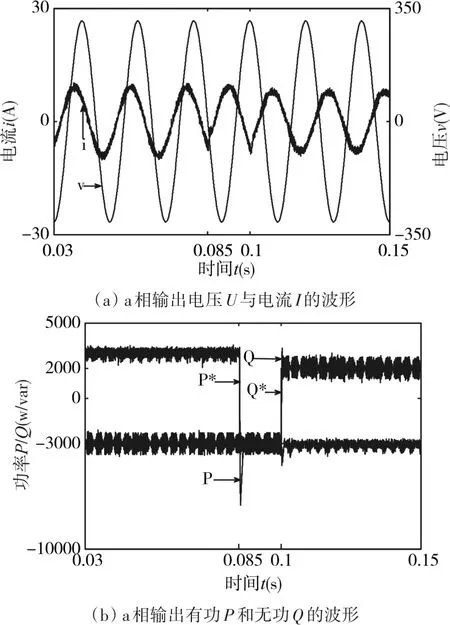
图8 有功功率和无功功率给定突变时的系统响应
三相可逆平衡电子负载装置的电流和功率仿真波形如图6~图9所示,图6~图9为a相功率与电流波形图。
由图6~图9可知,三相可逆平衡电子负载模拟装置输出电流和输出功率都跟随了指令值,在1/4周期内都完成了跟踪任务。虽然负载输出电流与输出功率超调量、谐波比较大,但实现了能量的双向流动。

图9 有功功率给定突变时的系统响应
7 结语
建立基于Matlab/Simulink仿真平台的三相电子负载装置仿真模型,通过对所设计的三相可逆平衡电子负载装置的仿真实验,证明了本设计方案的可行性。该设计方案可以应用于各种平衡负载的实验研究,具有广泛的适应性,同时为不平衡负载的实验研究提供了参考。
